Vous aimerez peut-être aussi
- Théorie et pratique du treuil: Treuils fixes et mobilesD'EverandThéorie et pratique du treuil: Treuils fixes et mobilesPas encore d'évaluation
- Chap 5b Organes de MachinesDocument19 pagesChap 5b Organes de MachinesAhmed BaalbakiPas encore d'évaluation
- Cours - Transmission - de - Mouvements-2 (Recovered 1) PDFDocument14 pagesCours - Transmission - de - Mouvements-2 (Recovered 1) PDFAbdelmajid AittalebPas encore d'évaluation
- Boite de Vitesse2015Document5 pagesBoite de Vitesse2015hamrouniPas encore d'évaluation
- Chap 5 Accouplements PDFDocument13 pagesChap 5 Accouplements PDFJeremie Ivann NgoyePas encore d'évaluation
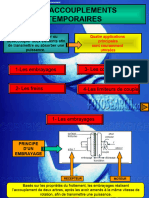
- Les Accouplements TemporairesDocument50 pagesLes Accouplements TemporairesAbdelkhalek SaidiPas encore d'évaluation
- Cours Transmission de Mouvements-2Document14 pagesCours Transmission de Mouvements-2Hassan HallaouaPas encore d'évaluation
- 191 LesengrenagesDocument8 pages191 LesengrenagesMoncef MhasniPas encore d'évaluation
- 0-Presentation BoîteDeVitessesDocument5 pages0-Presentation BoîteDeVitessesBernard MbotchackPas encore d'évaluation
- Poulie Courroie - PpsDocument10 pagesPoulie Courroie - PpsMoustapha Abdillahi abdiPas encore d'évaluation
- Chap 2 Les Embrayages GM2 ENIBDocument23 pagesChap 2 Les Embrayages GM2 ENIBTaoufik Ben HadidPas encore d'évaluation
- Transmission de Puissance Prof PDFDocument16 pagesTransmission de Puissance Prof PDFRuppy MIYOUNAPas encore d'évaluation
- Accouplements Embrayages FreinsDocument15 pagesAccouplements Embrayages FreinstnpqqjndrzPas encore d'évaluation
- 5268 5091Document4 pages5268 5091Soufiane RamdaniPas encore d'évaluation
- TR Poulie Et CourroieDocument10 pagesTR Poulie Et CourroieamraneaminePas encore d'évaluation
- Ransmission Et/ Ou Transformation de Mouvement: DéfinitionDocument11 pagesRansmission Et/ Ou Transformation de Mouvement: DéfinitionCesar romainPas encore d'évaluation
- CM 3A Limiteurs de CoupleDocument51 pagesCM 3A Limiteurs de CouplemouadPas encore d'évaluation
- 5.chap.5 Boite de Vitesses EtudiantDocument33 pages5.chap.5 Boite de Vitesses EtudiantAli JaouediPas encore d'évaluation
- 13 Poulie CourroiesDocument13 pages13 Poulie Courroieszouhour brahmiPas encore d'évaluation
- T M VDocument13 pagesT M VMed Amine HattakiPas encore d'évaluation
- Les Accouplements TemporaireDocument8 pagesLes Accouplements Temporaireislam mohammedPas encore d'évaluation
- Cours de Morphologie Des MachinesDocument43 pagesCours de Morphologie Des MachinesAnicet MulumbaPas encore d'évaluation
- Accouplements Temporaires: Embrayages, Freins, Coupleurs & TDDocument43 pagesAccouplements Temporaires: Embrayages, Freins, Coupleurs & TDFatimezzahra AIT SI YOUSSEFPas encore d'évaluation
- Transmetteurs 2Document7 pagesTransmetteurs 2jiahnPas encore d'évaluation
- Les Embrayages OtmanDocument25 pagesLes Embrayages OtmanOtman StariPas encore d'évaluation
- Limiteur de Couple - Solutions Limiteur de Couple - Débrayage Automatique 1. FonctionDocument4 pagesLimiteur de Couple - Solutions Limiteur de Couple - Débrayage Automatique 1. FonctionRzdx 991Pas encore d'évaluation
- 10 Accouplements TemporairesDocument20 pages10 Accouplements Temporaireszouhour brahmi100% (1)
- Expose Accouplement TemporaireDocument37 pagesExpose Accouplement TemporaireSteven Thierry NgoualaPas encore d'évaluation
- EMBRAYAGEDocument8 pagesEMBRAYAGEMohamed KerrouPas encore d'évaluation
- Moteurs SpéciauxDocument11 pagesMoteurs SpéciauxzellegPas encore d'évaluation
- Vérins Distributeurs Et Accessoires Pneumatiques PDFDocument25 pagesVérins Distributeurs Et Accessoires Pneumatiques PDFAbdeslam ElmrabetPas encore d'évaluation
- Alignement Des Machines TournantesDocument55 pagesAlignement Des Machines TournantesOp Po80% (5)
- Recherche BibliographiquelDocument9 pagesRecherche BibliographiquelokjkkjjhPas encore d'évaluation
- Transmissions Par Roues Et Chaînes: Principales CaractéristiquesDocument7 pagesTransmissions Par Roues Et Chaînes: Principales CaractéristiquesAmîñê FãPas encore d'évaluation
- Demarage Directe (1 Et Sens) Rotoroque Statorique Etoile Triangle Avec Advantage Et InconveniantDocument19 pagesDemarage Directe (1 Et Sens) Rotoroque Statorique Etoile Triangle Avec Advantage Et InconveniantAssia SaoudiPas encore d'évaluation
- البكرات و السيورDocument10 pagesالبكرات و السيورRizouga AbdallahPas encore d'évaluation
- TR de P CoursDocument16 pagesTR de P CoursomatrPas encore d'évaluation
- CPI1-CONST-C-Guidage en RotationDocument13 pagesCPI1-CONST-C-Guidage en RotationEL CosmoPas encore d'évaluation
- Les Embrayages OtmanDocument16 pagesLes Embrayages Otmanhalim otmanePas encore d'évaluation
- Variation de VitesseDocument5 pagesVariation de VitessetaharPas encore d'évaluation
- Chap 6Document11 pagesChap 6Nch NMPas encore d'évaluation
- Ds2002 2Document4 pagesDs2002 2Jean CorreaPas encore d'évaluation
- Moteur Dahlander Generalite Machine AsynchroneDocument14 pagesMoteur Dahlander Generalite Machine AsynchroneNadir IguernelalaPas encore d'évaluation
- DRDocument8 pagesDRKasi FilsPas encore d'évaluation
- Cours Synthese Poulie Courroies-EngrenagesDocument9 pagesCours Synthese Poulie Courroies-EngrenagesYassin HachanaPas encore d'évaluation
- Moteur Pas A PasDocument7 pagesMoteur Pas A Pasahocine2011Pas encore d'évaluation
- Ml4ascp DT CopieDocument14 pagesMl4ascp DT CopieEmpire LalouPas encore d'évaluation
- Transmission de Puissance Par Accouplements Permanents PDFDocument18 pagesTransmission de Puissance Par Accouplements Permanents PDFAbdelkhalek SaidiPas encore d'évaluation
- Cours EngrenagesDocument12 pagesCours EngrenageszohirPas encore d'évaluation
- Accouplements, Embrayages, FreinsDocument20 pagesAccouplements, Embrayages, FreinsrachidaccPas encore d'évaluation
- Moteur Pap M Mento Ok v0.1Document27 pagesMoteur Pap M Mento Ok v0.1Sylvain NomenjanaharyPas encore d'évaluation
- Cablage Moteur AsynchroneDocument11 pagesCablage Moteur AsynchroneAyb Cha Kri100% (1)
- Presentation Usine IDocument14 pagesPresentation Usine IMohamed LemrabottPas encore d'évaluation
- Documentation PressesDocument315 pagesDocumentation PressesMohamed LemrabottPas encore d'évaluation
- 04 RP - Maintenance 2012-06 - FR PDFDocument101 pages04 RP - Maintenance 2012-06 - FR PDFAliyine EthmanePas encore d'évaluation
- Rapport de Stage Finale Hamdi1Document80 pagesRapport de Stage Finale Hamdi1Mohamed LemrabottPas encore d'évaluation
- Rapport SNIMDocument47 pagesRapport SNIMMohamed Lemrabott100% (5)
- 3210037796-Insp - Rep. SNIM Recl. D110 - Rev20220701 - FRDocument20 pages3210037796-Insp - Rep. SNIM Recl. D110 - Rev20220701 - FRMohamed LemrabottPas encore d'évaluation
- Rapport de Tournee 1Document109 pagesRapport de Tournee 1Mohamed LemrabottPas encore d'évaluation
- L3 - EEA - 2018 - Rapport - de - Stage - TELMIDY - Sidi MohamedDocument68 pagesL3 - EEA - 2018 - Rapport - de - Stage - TELMIDY - Sidi MohamedMohamed LemrabottPas encore d'évaluation
- 06 RP - Process & System Optimisation 2012-06 - fr-1Document38 pages06 RP - Process & System Optimisation 2012-06 - fr-1Mohamed LemrabottPas encore d'évaluation
- Rapport Stage Phase I.Document48 pagesRapport Stage Phase I.Mohamed LemrabottPas encore d'évaluation
- Etude Des Principaux Defauts PDFDocument18 pagesEtude Des Principaux Defauts PDFbousnina100% (1)
- Weir Minerals - KHD HPGR FRA - Mars2011Document32 pagesWeir Minerals - KHD HPGR FRA - Mars2011Mohamed LemrabottPas encore d'évaluation
- Les Technique de SurveillanceDocument3 pagesLes Technique de SurveillanceZGBMRDPas encore d'évaluation
- 3210037796-Inspection report-SNIM Reclaimer J109 - Rev20220630 - FRDocument22 pages3210037796-Inspection report-SNIM Reclaimer J109 - Rev20220630 - FRMohamed LemrabottPas encore d'évaluation
- 3210037796-Inspection report-SNIM Reclaimer D112 - Rev20220630 - FRDocument24 pages3210037796-Inspection report-SNIM Reclaimer D112 - Rev20220630 - FRMohamed LemrabottPas encore d'évaluation
- Partie 3 Les-Vibrations-Des-Machines-TournantesDocument10 pagesPartie 3 Les-Vibrations-Des-Machines-TournantesMohamed LemrabottPas encore d'évaluation
- Partie 2 (MEF) EtudiDocument96 pagesPartie 2 (MEF) EtudiMohamed LemrabottPas encore d'évaluation
- 02 RP - Design 2012-06 - FRDocument81 pages02 RP - Design 2012-06 - FRMohamed LemrabottPas encore d'évaluation
- C2 Méthodes de MaintenanceDocument45 pagesC2 Méthodes de MaintenanceMohamed LemrabottPas encore d'évaluation
- Cours de MEAS-JaugesDocument16 pagesCours de MEAS-JaugesMohamed LemrabottPas encore d'évaluation
- Du LaitDocument6 pagesDu LaitMohamed LemrabottPas encore d'évaluation
- Morais Pinheiro Carlos DavideDocument90 pagesMorais Pinheiro Carlos DavideMohamed LemrabottPas encore d'évaluation
- C1 Enjeux Et StratégieDocument29 pagesC1 Enjeux Et StratégieMohamed LemrabottPas encore d'évaluation
- C0 Intro Partie 1Document6 pagesC0 Intro Partie 1Mohamed LemrabottPas encore d'évaluation
- P-40-5004-Q98-0001 - 03 CriterésDocument11 pagesP-40-5004-Q98-0001 - 03 CriterésMohamed LemrabottPas encore d'évaluation
- 2018 BTS Métiers de Leau Document DaccompagnementDocument49 pages2018 BTS Métiers de Leau Document DaccompagnementMohamed LemrabottPas encore d'évaluation
- Chapitre1: Qu'est Ce Qu'un Projet?: Pourquoi Manager Des ProjetsDocument4 pagesChapitre1: Qu'est Ce Qu'un Projet?: Pourquoi Manager Des ProjetsMohamed LemrabottPas encore d'évaluation
- Emploi Sem 10Document1 pageEmploi Sem 10Mohamed LemrabottPas encore d'évaluation
- Bon Cir - Chap GDocument28 pagesBon Cir - Chap Gbechir azzouzPas encore d'évaluation
- Cmi 3 2015 INTER 0Document52 pagesCmi 3 2015 INTER 0Merdas ChamseddinePas encore d'évaluation
- Révision de La Division 1 de L Édition 2010 Du CODAPDocument47 pagesRévision de La Division 1 de L Édition 2010 Du CODAPRabah BrikaPas encore d'évaluation
- Cat FR CA2009 p2Document50 pagesCat FR CA2009 p2omoulayePas encore d'évaluation
- MachinesDocument14 pagesMachinesNesrine NasriPas encore d'évaluation
- Devoir de Synthèse N°1 - Informatique - 3ème Economie Gestion (2009-2010) 2Document1 pageDevoir de Synthèse N°1 - Informatique - 3ème Economie Gestion (2009-2010) 2Aida Ben Said100% (2)
- Matériaux de ConstructionDocument23 pagesMatériaux de ConstructionFatre 1980Pas encore d'évaluation
- Unite 25 Manuel OpératoireDocument201 pagesUnite 25 Manuel OpératoireAbdessalem BougoffaPas encore d'évaluation
- Signalisation de VirageDocument5 pagesSignalisation de VirageLARRYVANIAPas encore d'évaluation
- DoublissimoDocument3 pagesDoublissimoPierre-Olivier MouthuyPas encore d'évaluation
- Pui EnerDocument19 pagesPui EnerAhcène AouichePas encore d'évaluation
- La Gestion Des Risques Pour Les Systèmes D'informationDocument12 pagesLa Gestion Des Risques Pour Les Systèmes D'informationAtef BoussandelPas encore d'évaluation
- CVDocument1 pageCVGhizlane HaliouaPas encore d'évaluation
- Le Hobbit 3 La Bataille Des Cinq Armées Streaming VFDocument11 pagesLe Hobbit 3 La Bataille Des Cinq Armées Streaming VFlehobbit3vfPas encore d'évaluation
- FacebookDocument1 pageFacebookRyan LaubelPas encore d'évaluation
- Pagine Da ASME BPVC II 2007 MATERIALS Part D Properties (Customary)Document2 pagesPagine Da ASME BPVC II 2007 MATERIALS Part D Properties (Customary)dp750% (1)
- FT Korpox HR 600 2017Document1 pageFT Korpox HR 600 2017PaPa RCPas encore d'évaluation
- Tribune 38 1 PDFDocument3 pagesTribune 38 1 PDFettijaniPas encore d'évaluation
- No Te de Cal Cul Plo M Beri E - WatermarkDocument2 pagesNo Te de Cal Cul Plo M Beri E - WatermarkLaurent BeazoPas encore d'évaluation
- Tutoriel Scratch-JR Pour Apprendre À Programmer Dès La MaternelleDocument11 pagesTutoriel Scratch-JR Pour Apprendre À Programmer Dès La MaternelleDrechslerPas encore d'évaluation
- F RH 001 C Machiniste CNCDocument4 pagesF RH 001 C Machiniste CNCYoussef AlaouiPas encore d'évaluation
- Fibre Optique Monomode PDFDocument2 pagesFibre Optique Monomode PDFCoryPas encore d'évaluation
- SMQ La Nouvelle Norme Iso 9001 V2015Document22 pagesSMQ La Nouvelle Norme Iso 9001 V2015Chiheb G0% (1)
- Mémoire de Projet de Fin D'étudesDocument58 pagesMémoire de Projet de Fin D'étudesAmine DjellaliPas encore d'évaluation
- Memoire RamDocument12 pagesMemoire RamIssam LabbaouiPas encore d'évaluation
- CTCARAB06512 Gaspillage Et Recyclage Des DéchetsDocument5 pagesCTCARAB06512 Gaspillage Et Recyclage Des DéchetsChristy EidPas encore d'évaluation
- Plaquette Commerciale NafidaDocument78 pagesPlaquette Commerciale NafidaanalndadnPas encore d'évaluation
- Chaînes Logistiques Et PerformanceDocument59 pagesChaînes Logistiques Et Performanceamali861100% (1)
- Analyse AichaDocument23 pagesAnalyse AichaKamal Archi100% (4)
- 2FV2V Bu Fre 2366Document6 pages2FV2V Bu Fre 2366Gonzalo AlvarezPas encore d'évaluation