Vous aimerez peut-être aussi
- Cinétique 2021-2022Document6 pagesCinétique 2021-2022Wissal ElPas encore d'évaluation
- Rappel Pendule Simple Uh1Document6 pagesRappel Pendule Simple Uh1ad5271439Pas encore d'évaluation
- TD Mécanique CDocument47 pagesTD Mécanique CwillyPas encore d'évaluation
- MecaRelat MEEF M1-S1 TD4Document2 pagesMecaRelat MEEF M1-S1 TD4Youssef DahaniPas encore d'évaluation
- 30 DynamiqueDocument20 pages30 DynamiqueAKRAMPas encore d'évaluation
- Dynamique CoursDocument5 pagesDynamique CoursCyrille DjankouPas encore d'évaluation
- Cours 071 Outils Mathematiques Les TorseursDocument4 pagesCours 071 Outils Mathematiques Les TorseursAbdennour JbrPas encore d'évaluation
- 4 - Dynamique Des Systèmes MécaniquesDocument5 pages4 - Dynamique Des Systèmes MécaniquesChaima LajiliPas encore d'évaluation
- Résumé Formulaire DynamiqueDocument2 pagesRésumé Formulaire DynamiqueZaineb AbbadPas encore d'évaluation
- P145 - TD 4 (Solution)Document13 pagesP145 - TD 4 (Solution)Wissal ElPas encore d'évaluation
- 117 Serie Mecanique Du Point SMPC Smia s1 Cinematique Changement ReferentielDocument9 pages117 Serie Mecanique Du Point SMPC Smia s1 Cinematique Changement ReferentielMohamed MezianiPas encore d'évaluation
- TP2 ELP 3 An ELTDocument2 pagesTP2 ELP 3 An ELTDiigPas encore d'évaluation
- DEVOIR 11 OctobreDocument6 pagesDEVOIR 11 OctobreHeni HtiraPas encore d'évaluation
- ATS Partie 1: Mécanique Chapitre 1: Cinématique Du Point: I. Repérage Dans L'espace Et Dans Le TempsDocument9 pagesATS Partie 1: Mécanique Chapitre 1: Cinématique Du Point: I. Repérage Dans L'espace Et Dans Le TempsEl BenPas encore d'évaluation
- CH 4 Mouvement CirculaireDocument5 pagesCH 4 Mouvement Circulairemulungula isalimyaPas encore d'évaluation
- Matériaux Magnétiques en LélectrotechniqueDocument20 pagesMatériaux Magnétiques en LélectrotechniqueBagayoko SiakaPas encore d'évaluation
- Objectifs Examen Moment Cinétique Oscillation JADocument8 pagesObjectifs Examen Moment Cinétique Oscillation JAMandem EsPas encore d'évaluation
- Formules D'lectrotechniquesDocument2 pagesFormules D'lectrotechniquesHicham CherrabiPas encore d'évaluation
- 2019-20 Systemes MécaniquesDocument4 pages2019-20 Systemes MécaniquesFatiha HouyamePas encore d'évaluation
- TP 01 Onduleur MonophaseDocument1 pageTP 01 Onduleur MonophaseAb CdPas encore d'évaluation
- Cours5 Electrostatique PHY106bDocument10 pagesCours5 Electrostatique PHY106bBOUZ2010Pas encore d'évaluation
- chp3 2Document1 pagechp3 2nourPas encore d'évaluation
- Coursa05 CinematiqueDocument16 pagesCoursa05 Cinematiqueerrairachid100% (1)
- 2019-2020 - UE2 Electromagnétisme 1 - Examen (Réponses)Document3 pages2019-2020 - UE2 Electromagnétisme 1 - Examen (Réponses)Amstrong 234Pas encore d'évaluation
- Chapitre 7 Dynamique PDFDocument18 pagesChapitre 7 Dynamique PDFkiojoPas encore d'évaluation
- Deux Series Dipole RL Avec Corrections Bac Tunisie 2019 WWW - Bac - .Org - .TN - PDFDocument25 pagesDeux Series Dipole RL Avec Corrections Bac Tunisie 2019 WWW - Bac - .Org - .TN - PDFAicha Gahlass100% (2)
- 07a CinematiqueDocument3 pages07a CinematiqueLE TOHICPas encore d'évaluation
- TP - M2 - I2E2I - Rã©gime Dynamique - 17-18Document11 pagesTP - M2 - I2E2I - Rã©gime Dynamique - 17-18Kévin MitnickPas encore d'évaluation
- Applications Physique 3Document12 pagesApplications Physique 3Idris HammouchePas encore d'évaluation
- MS CH3Document41 pagesMS CH3Amine TalbiPas encore d'évaluation
- Formulaire RDM PoutresDocument9 pagesFormulaire RDM PoutresAbdelali Merouane50% (2)
- Algèbre Linéaire - Problème de Synthèse Sujet Maths Concours ECSDocument7 pagesAlgèbre Linéaire - Problème de Synthèse Sujet Maths Concours ECSrosa duartePas encore d'évaluation
- Dynmq PT Mat EXO Corrig S FRDocument28 pagesDynmq PT Mat EXO Corrig S FRzaki100% (1)
- Poste Automatique de Decoupage de MarbreDocument4 pagesPoste Automatique de Decoupage de MarbreNadhir SakouhiPas encore d'évaluation
- ExamenCorrigesdeMecaniqueI LAMSAADIDocument45 pagesExamenCorrigesdeMecaniqueI LAMSAADINabil Makoudy100% (3)
- 2 Cinématique Du PointDocument6 pages2 Cinématique Du Pointsambe.elPas encore d'évaluation
- Td17 Forces Centrales CorrDocument2 pagesTd17 Forces Centrales CorrAdri LebPas encore d'évaluation
- Contrôle N°2Document4 pagesContrôle N°2Ayoub HmitouPas encore d'évaluation
- Formulaire Dipoles ParfaitsDocument1 pageFormulaire Dipoles ParfaitsDavid100% (1)
- DynamiqueDocument10 pagesDynamiquepcprepasPas encore d'évaluation
- Exmecanique 2008-2009 5Document7 pagesExmecanique 2008-2009 5Salim ErrabiiPas encore d'évaluation
- 13-Freinage Électromagnétique CorrectionDocument1 page13-Freinage Électromagnétique CorrectionlkmkmlkPas encore d'évaluation
- 1cm3jftoi 531976Document4 pages1cm3jftoi 531976Hamadi DialloPas encore d'évaluation
- Polycopié2 CncrsDocument7 pagesPolycopié2 CncrsLghazi OumssadPas encore d'évaluation
- Fiche Meca2Document5 pagesFiche Meca2yumiPas encore d'évaluation
- Cotdmeca04 Corrig MetzDocument6 pagesCotdmeca04 Corrig Metzbelhagemohamad61Pas encore d'évaluation
- 3.2-Montage Longue Dérivation Ou Amont: Esure Des Resistances ElectriquesDocument3 pages3.2-Montage Longue Dérivation Ou Amont: Esure Des Resistances ElectriquesWafik FarsiPas encore d'évaluation
- Newton ElevesDocument5 pagesNewton Elevesnassimboumaza4Pas encore d'évaluation
- 2 - Statique Des Systèmes Mécaniques PDFDocument4 pages2 - Statique Des Systèmes Mécaniques PDFartustPas encore d'évaluation
- Corr - DM Nc2b01 de Mecc81canique de SolideDocument2 pagesCorr - DM Nc2b01 de Mecc81canique de SolideecomechPas encore d'évaluation
- Ngoy Sompwe HanseDocument18 pagesNgoy Sompwe HanseHanse NgoyPas encore d'évaluation
- Zone Tarifaire 3: BD Circulaire Nord Leclerc Route de ChoisyDocument1 pageZone Tarifaire 3: BD Circulaire Nord Leclerc Route de ChoisyDelia PopescuPas encore d'évaluation
- Entre Tes MainsDocument2 pagesEntre Tes Mainscardey77166Pas encore d'évaluation
- Cinématique Du Point Matériel 1Document8 pagesCinématique Du Point Matériel 1sambe.elPas encore d'évaluation
- C00 Masse Et Inertie Des SolidesDocument5 pagesC00 Masse Et Inertie Des SolidesMarc SalettePas encore d'évaluation
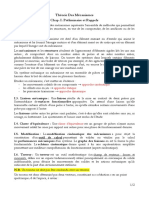
- 1 Chap I Préliminaire Et RappelsDocument2 pages1 Chap I Préliminaire Et RappelsLamia OhrchePas encore d'évaluation
- Mecanique Du PointDocument6 pagesMecanique Du PointFouad Elhajji100% (1)
- Vendredi-TD2 SuiteDocument15 pagesVendredi-TD2 SuiteFatiha HouyamePas encore d'évaluation
- P145 - TD 5Document2 pagesP145 - TD 5Wissal ElPas encore d'évaluation
- TD: La Cinétique Du Solide: Exercice 1Document1 pageTD: La Cinétique Du Solide: Exercice 1Wissal ElPas encore d'évaluation
- TorseurDocument36 pagesTorseurFilaliAbderrahimPas encore d'évaluation
- Devoir Analyse NumeriqueDocument2 pagesDevoir Analyse NumeriqueFatiha HouyamePas encore d'évaluation
- CP2022 Preselectionnes INE1 08HDocument5 pagesCP2022 Preselectionnes INE1 08HFatiha HouyamePas encore d'évaluation
- DISPOGEIIDocument53 pagesDISPOGEIIFatiha HouyamePas encore d'évaluation
- Document de Stage.2 (Enregistrement Automatique)Document64 pagesDocument de Stage.2 (Enregistrement Automatique)Fatiha HouyamePas encore d'évaluation
- Calendrier PFE IGC - 2021 - 2022 - VFDocument4 pagesCalendrier PFE IGC - 2021 - 2022 - VFFatiha HouyamePas encore d'évaluation
- Le Stage en EntrepriseDocument3 pagesLe Stage en EntrepriseFatiha HouyamePas encore d'évaluation
- Document de Stage.2 (Enregistrement Automatique)Document64 pagesDocument de Stage.2 (Enregistrement Automatique)Fatiha HouyamePas encore d'évaluation
- Document de StageDocument3 pagesDocument de StageFatiha HouyamePas encore d'évaluation
- Résultats Accès À 2A 2ITEDocument1 pageRésultats Accès À 2A 2ITEFatiha HouyamePas encore d'évaluation
- Résultats Accès À 2A ISICDocument1 pageRésultats Accès À 2A ISICFatiha HouyamePas encore d'évaluation
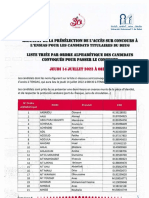
- Résultat de La Préselection de L'accès Sur Concours À l'ENSIASDocument5 pagesRésultat de La Préselection de L'accès Sur Concours À l'ENSIASFatiha HouyamePas encore d'évaluation
- Serie2TLAIng2013 2014Document2 pagesSerie2TLAIng2013 2014Ghazouani HaythemPas encore d'évaluation
- Pfe GC 0047 PDFDocument105 pagesPfe GC 0047 PDFHervé JabeaPas encore d'évaluation
- Adaptation de La Tension À L'utilisationDocument7 pagesAdaptation de La Tension À L'utilisationfatima zohraPas encore d'évaluation
- Synthèse CinématiqDocument1 pageSynthèse CinématiqmasteratsiiPas encore d'évaluation
- Reussir Vos Fraisages CNC3018 Pro CncFraises V1.0Document37 pagesReussir Vos Fraisages CNC3018 Pro CncFraises V1.0franck giorgi100% (1)
- TCF CanadaDocument7 pagesTCF CanadaAmira BenhammouPas encore d'évaluation
- TD 3 Capteur Et Instrumentation 2021 CorrigéDocument4 pagesTD 3 Capteur Et Instrumentation 2021 CorrigéRabah Hadjar100% (5)
- 2022 DEPREZ-AudreyDocument38 pages2022 DEPREZ-Audreywb5510078Pas encore d'évaluation
- 1 13 Imprimer Documents RecapitulatifsDocument14 pages1 13 Imprimer Documents RecapitulatifsAzsrtyPas encore d'évaluation
- Soupe Choux Fleur CheddarDocument3 pagesSoupe Choux Fleur CheddarLoren ZoPas encore d'évaluation
- Banque CCP Sup ProbaDocument2 pagesBanque CCP Sup ProbaAziz ChafikPas encore d'évaluation
- V120i 25324 5 PM FrenchDocument450 pagesV120i 25324 5 PM FrenchFodilsbsPas encore d'évaluation
- Fe 50 Fiche Explicative Des Fiches Cee Sme v17 VFDocument19 pagesFe 50 Fiche Explicative Des Fiches Cee Sme v17 VFhassankchPas encore d'évaluation
- Langage Et AnthropologieDocument20 pagesLangage Et AnthropologieEl Marjani MokhtarPas encore d'évaluation
- OranunevillealgriennereconquiseuncentrehistoriqueenmutationDocument16 pagesOranunevillealgriennereconquiseuncentrehistoriqueenmutationsidoPas encore d'évaluation
- SketchUp Pour Le Dessin Des MeublesDocument118 pagesSketchUp Pour Le Dessin Des MeublesSamantha Erickson100% (1)
- DAF Comite Audit CAadmin IFA DFCGDocument8 pagesDAF Comite Audit CAadmin IFA DFCGToah Bi Marc DidiaPas encore d'évaluation
- Texte 2Document7 pagesTexte 2Ashema Tshokama100% (1)
- AccumulateurDocument28 pagesAccumulateurdarcisPas encore d'évaluation
- Cours #7 - La Loupe - 10 - 01Document11 pagesCours #7 - La Loupe - 10 - 01Said MessaoudPas encore d'évaluation
- Guide Du Projet Professionnel Et Personnel de L'étudiantDocument32 pagesGuide Du Projet Professionnel Et Personnel de L'étudiantTik Tok Galsen Fun OfficielPas encore d'évaluation
- Cours1 MasterDocument13 pagesCours1 Mastermahfoud1254Pas encore d'évaluation
- Lexium SD3 - LU9GC3Document2 pagesLexium SD3 - LU9GC3Mohamed Amine LABIDIPas encore d'évaluation
- (Aritech) Cd3402s3Plus PDFDocument83 pages(Aritech) Cd3402s3Plus PDFhenryPas encore d'évaluation
- Carlos CASTANEDA - Histoires de PouvoirDocument188 pagesCarlos CASTANEDA - Histoires de Pouvoiralphaorio100% (1)
- Chapitre 4 Redressement Triphasé CommandéDocument11 pagesChapitre 4 Redressement Triphasé CommandéYahia Nino100% (1)
- Cours Pao 08.11Document30 pagesCours Pao 08.11tifenn.fleckPas encore d'évaluation
- Ob 2a860b Hs Trois Mariages Chez Les FortunesDocument215 pagesOb 2a860b Hs Trois Mariages Chez Les FortunesMentor MCconell RamsèsPas encore d'évaluation
- Le profilage au service du football: Démarche scientifique pour un recrutement et entraînements optimisésD'EverandLe profilage au service du football: Démarche scientifique pour un recrutement et entraînements optimisésPas encore d'évaluation
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsD'EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Harmonisation Energétique des Personnes: Manuel de Curothérapie 2020D'EverandHarmonisation Energétique des Personnes: Manuel de Curothérapie 2020Évaluation : 4 sur 5 étoiles4/5 (8)
- L'Ombre à l'Univers: La structure des particules élémentaires XIIfD'EverandL'Ombre à l'Univers: La structure des particules élémentaires XIIfPas encore d'évaluation
- Un régime quantiqueD'EverandUn régime quantiqueÉvaluation : 5 sur 5 étoiles5/5 (1)
- Théorie relative de la musique: Maîtriser le mouvement par la logique des intervallesD'EverandThéorie relative de la musique: Maîtriser le mouvement par la logique des intervallesÉvaluation : 4 sur 5 étoiles4/5 (1)
- Physique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresD'EverandPhysique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresÉvaluation : 5 sur 5 étoiles5/5 (2)
- Les LES TRUCS MATHEMATIQUES AU PRIMAIRE: et si on leur donnait du sens!D'EverandLes LES TRUCS MATHEMATIQUES AU PRIMAIRE: et si on leur donnait du sens!Évaluation : 2 sur 5 étoiles2/5 (1)
- La pensée dirigée: Traité sur le raisonnement et les logiquesD'EverandLa pensée dirigée: Traité sur le raisonnement et les logiquesÉvaluation : 5 sur 5 étoiles5/5 (2)
- Mathématiques et Mathématiciens Pensées et CuriositésD'EverandMathématiques et Mathématiciens Pensées et CuriositésÉvaluation : 4.5 sur 5 étoiles4.5/5 (5)
- L'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.D'EverandL'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.Pas encore d'évaluation
- le Phoenix de nos âmes: Les lois énergétiques de la lumière divineD'Everandle Phoenix de nos âmes: Les lois énergétiques de la lumière divinePas encore d'évaluation
- Bioénergie et Sciences Occultes: Pour un corps sain et un esprit sain dans un lieu sainD'EverandBioénergie et Sciences Occultes: Pour un corps sain et un esprit sain dans un lieu sainÉvaluation : 4 sur 5 étoiles4/5 (2)
- Historique et description des procédés du daguerréotype et du diorama: Essai historique sur les sciences et techniquesD'EverandHistorique et description des procédés du daguerréotype et du diorama: Essai historique sur les sciences et techniquesPas encore d'évaluation
- La Conscience Et L'Univers Existent Sans Commencement Ni FinD'EverandLa Conscience Et L'Univers Existent Sans Commencement Ni FinPas encore d'évaluation
- Voyager à Travers les Mondes Parallèles pour Atteindre vos RêvesD'EverandVoyager à Travers les Mondes Parallèles pour Atteindre vos RêvesÉvaluation : 4 sur 5 étoiles4/5 (11)
- Saturne: Les Grands Articles d'UniversalisD'EverandSaturne: Les Grands Articles d'UniversalisPas encore d'évaluation
- Sur les fondements de la théorie des ensembles transfinisD'EverandSur les fondements de la théorie des ensembles transfinisPas encore d'évaluation