Vous aimerez peut-être aussi
- Electromagnétisme PCSI - MPSIDocument105 pagesElectromagnétisme PCSI - MPSIAder Med67% (3)
- Tracé en PlanDocument8 pagesTracé en PlanYacoudima100% (1)
- Mini-Projet Sur RDM Au Niveau de l'ENSTP Du TchadDocument96 pagesMini-Projet Sur RDM Au Niveau de l'ENSTP Du TchadIves GuelmbayePas encore d'évaluation
- Exos-Duree de Vie RoulementsDocument5 pagesExos-Duree de Vie Roulementsmaryem fassiPas encore d'évaluation
- SERIE TD2 - Cinematique - 2020 2021Document10 pagesSERIE TD2 - Cinematique - 2020 2021Awatif BePas encore d'évaluation
- Chaines de Solides - Comportement CinématiqueDocument8 pagesChaines de Solides - Comportement CinématiqueAbdelali YacoubiPas encore d'évaluation
- Cours MSP - Première Partie 2021 - 2022Document47 pagesCours MSP - Première Partie 2021 - 2022ZerPas encore d'évaluation
- Chapitre 1 Caracterisation Mecanique Des MateriauxDocument26 pagesChapitre 1 Caracterisation Mecanique Des MateriauxEmna Ben Hammouda0% (1)
- 06.02 - Dynamique D'un Solide en Rotation - Equilibrage PDFDocument5 pages06.02 - Dynamique D'un Solide en Rotation - Equilibrage PDFMeryem Berr100% (2)
- Fonction Transmettre Transmission de Puissance Poulie Courroie ExercicesDocument9 pagesFonction Transmettre Transmission de Puissance Poulie Courroie ExercicesHamid MchachraPas encore d'évaluation
- Équilibrage DynamiqueDocument1 pageÉquilibrage Dynamiqueabibeh1001Pas encore d'évaluation
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- CoursDocument35 pagesCours[AE]Pas encore d'évaluation
- Coupes Et SectionsDocument14 pagesCoupes Et Sections3ab9our92% (13)
- DS2 PDFDocument8 pagesDS2 PDFAbdelilah Elmesbahi100% (1)
- TorseurDocument46 pagesTorseurnooneoveronePas encore d'évaluation
- TD N°3 Cinématique Du Contact PonctuelDocument4 pagesTD N°3 Cinématique Du Contact PonctuelAmine RbzPas encore d'évaluation
- CS-TM1-TD Hyperstatisme Bielle Manivelle CorrectionDocument9 pagesCS-TM1-TD Hyperstatisme Bielle Manivelle CorrectionPierre LancelotPas encore d'évaluation
- Ex 15 16Document18 pagesEx 15 16Sd instruPas encore d'évaluation
- Équilibrage Des Solides Tournants Profs PDFDocument8 pagesÉquilibrage Des Solides Tournants Profs PDFfitasmounirPas encore d'évaluation
- TD Embiellage Moto GraphiqueDocument1 pageTD Embiellage Moto GraphiqueDABAKH LDEEBOY100% (1)
- TD 1Document2 pagesTD 1hello 128Pas encore d'évaluation
- Théorie Mecanismes Etude de Cas-MaxpidDocument25 pagesThéorie Mecanismes Etude de Cas-MaxpidMerv Bouda100% (1)
- SNT Ri40 - DTDocument3 pagesSNT Ri40 - DTBoris Cathérin Vidjannagni DOHOUPas encore d'évaluation
- TD RDM L2 TroncDocument3 pagesTD RDM L2 TroncANGEL KOUAMEPas encore d'évaluation
- Train D'engrenageDocument13 pagesTrain D'engrenageAziza KarirPas encore d'évaluation
- DM RDM Bras Telescopique - Cor - v2Document3 pagesDM RDM Bras Telescopique - Cor - v2Mohamed El HajjamPas encore d'évaluation
- Correction de DentureDocument5 pagesCorrection de DenturetopjobPas encore d'évaluation
- DS4 SujetDocument8 pagesDS4 SujetPierre BeckPas encore d'évaluation
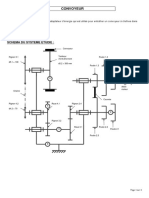
- Exercice ConvoyeurDocument6 pagesExercice ConvoyeurHajar AmalouPas encore d'évaluation
- Guidage en RotationDocument62 pagesGuidage en RotationMZX YT100% (1)
- 3-Schématisaton Et Analyse Cinématique PDFDocument15 pages3-Schématisaton Et Analyse Cinématique PDFhamzaPas encore d'évaluation
- Examen 2022 - 2023Document4 pagesExamen 2022 - 2023ybenguenny100% (1)
- Presentation Types de RoulementsDocument17 pagesPresentation Types de Roulementswass princePas encore d'évaluation
- CI03 TD09 Sujet - Modéliser Le Comportement Cinématique Des Trains ÉpicycloïdauxDocument6 pagesCI03 TD09 Sujet - Modéliser Le Comportement Cinématique Des Trains ÉpicycloïdauxIsmail El MoufakirPas encore d'évaluation
- Rapport BE1Document51 pagesRapport BE1ahmed017100% (1)
- CATIA V5 DocumentDocument6 pagesCATIA V5 DocumentChokri AtefPas encore d'évaluation
- 16 Ex11 Chaîne de TransmissionDocument1 page16 Ex11 Chaîne de Transmissionanass sbni100% (1)
- 2018-2019-DSN°3-2ème-etau Pour Tube - RattrapageDocument4 pages2018-2019-DSN°3-2ème-etau Pour Tube - RattrapageAdam BensaidPas encore d'évaluation
- Touret A Meuler Corrige PDFDocument2 pagesTouret A Meuler Corrige PDFMohamed Soibaha ChaambanePas encore d'évaluation
- Chap-3 Transmission de Puissance Par EngrenagesDocument14 pagesChap-3 Transmission de Puissance Par EngrenagesChokri AtefPas encore d'évaluation
- Guidage en Rotation PDFDocument7 pagesGuidage en Rotation PDFAyyoub BadreddinePas encore d'évaluation
- Liaisons GlissieresDocument65 pagesLiaisons GlissieresImen HammoudaPas encore d'évaluation
- Examen TS 2022Document1 pageExamen TS 2022yasmin Hassani100% (1)
- Dynamique SiDocument10 pagesDynamique Siamo norPas encore d'évaluation
- TD Cinematique CHARIOT FILOGUIDE PDFDocument4 pagesTD Cinematique CHARIOT FILOGUIDE PDFanassPas encore d'évaluation
- Reference Dynamique Du RotorDocument7 pagesReference Dynamique Du Rotorromy94496Pas encore d'évaluation
- APPLICATIONDocument1 pageAPPLICATIONmatozo100% (1)
- PressemécaniquecnepDocument4 pagesPressemécaniquecnepYousfi WahidPas encore d'évaluation
- TD 1Document4 pagesTD 1Jeremie Ivann NGOYEPas encore d'évaluation
- Guidage en Translation ProfDocument12 pagesGuidage en Translation Profslimani abdelilahPas encore d'évaluation
- (Analyse) Etau de Fraiseuse - e JMDocument3 pages(Analyse) Etau de Fraiseuse - e JMmarouf aek100% (3)
- Correction TD2 IMT2!21!22Document14 pagesCorrection TD2 IMT2!21!22WISSAL JANAPas encore d'évaluation
- Exo 04 05 Stat Liaison Equiv Cor PDFDocument4 pagesExo 04 05 Stat Liaison Equiv Cor PDFJourdan MbappePas encore d'évaluation
- TD Statique CinématiqueDocument5 pagesTD Statique CinématiqueNour Allah tabibPas encore d'évaluation
- 4 - Montage Des Roulements Et Des CoussinetsDocument10 pages4 - Montage Des Roulements Et Des CoussinetsISMAILPas encore d'évaluation
- Transmettre Avec Modification de La Vitesse Roues de FrictionDocument2 pagesTransmettre Avec Modification de La Vitesse Roues de FrictionMeriem Chiboub100% (1)
- S623.2 Comportement Des MecanismesDocument3 pagesS623.2 Comportement Des MecanismesGhada Mouedhen100% (2)
- 1 TD Sollicitations - Composees SUJETDocument2 pages1 TD Sollicitations - Composees SUJETsaraPas encore d'évaluation
- 170-E13 Frottement AdherenceDocument2 pages170-E13 Frottement AdherenceSegaAlainCoulibaly100% (1)
- Recueil D' Épreuves DUT-BTS Mécanique - 2003Document19 pagesRecueil D' Épreuves DUT-BTS Mécanique - 2003Bradley CasePas encore d'évaluation
- Chapitre III - Mobilité Et Hyperstatisme Partie 3Document3 pagesChapitre III - Mobilité Et Hyperstatisme Partie 3Lamia OhrchePas encore d'évaluation
- TD132 CorrectionDocument6 pagesTD132 CorrectionTalel MissaouiPas encore d'évaluation
- Programmation Exercice N°2Document3 pagesProgrammation Exercice N°2mathieu.angeardPas encore d'évaluation
- Calcul Des Roulements 2Document11 pagesCalcul Des Roulements 2NeoXana01Pas encore d'évaluation
- Equilibrage Dynamique PDFDocument3 pagesEquilibrage Dynamique PDFMustafa MoussaouiPas encore d'évaluation
- Ennoncés Exercices Suplémentaires MSDocument2 pagesEnnoncés Exercices Suplémentaires MSybenguennyPas encore d'évaluation
- Alliages FerreuxDocument3 pagesAlliages FerreuxAb DouPas encore d'évaluation
- DuretéDocument4 pagesDuretéAb DouPas encore d'évaluation
- Abaque TRWNDocument1 pageAbaque TRWNAb DouPas encore d'évaluation
- Présentation 1Document3 pagesPrésentation 1Ab DouPas encore d'évaluation
- Modele Gratuit FactureDocument1 pageModele Gratuit FactureRichmy DangbePas encore d'évaluation
- Demarche de ProjetDocument10 pagesDemarche de ProjetAbdessadek HamdaouiPas encore d'évaluation
- Chapitre 3 Structure Comportement Des Polymeres PDFDocument21 pagesChapitre 3 Structure Comportement Des Polymeres PDFHamid BouleghabPas encore d'évaluation
- 04 Boite Vitesses TourDocument8 pages04 Boite Vitesses TourÄness BŝŁm Řm EverPas encore d'évaluation
- ConjugaisonDocument4 pagesConjugaisonAb DouPas encore d'évaluation
- Demarche de ProjetDocument10 pagesDemarche de ProjetAbdessadek HamdaouiPas encore d'évaluation
- Standardisation Academique Des Schemas Cinematiques Mocn (Schema À Bulles)Document4 pagesStandardisation Academique Des Schemas Cinematiques Mocn (Schema À Bulles)Ab DouPas encore d'évaluation
- MateriauxDocument81 pagesMateriauxAb DouPas encore d'évaluation
- Ds IPDocument2 pagesDs IPAb DouPas encore d'évaluation
- 3 Coupes SectionsDocument7 pages3 Coupes SectionsAb DouPas encore d'évaluation
- Presentation 1 (Autosaved)Document10 pagesPresentation 1 (Autosaved)Ab DouPas encore d'évaluation
- Cours3 Choix Des MatériauxDocument46 pagesCours3 Choix Des MatériauxAyoub ID M’barkPas encore d'évaluation
- Essais MécaniquesDocument15 pagesEssais MécaniquesAb DouPas encore d'évaluation
- Alliage de CuivreDocument9 pagesAlliage de CuivreAb DouPas encore d'évaluation
- Notes 201109 204219Document37 pagesNotes 201109 204219Ab DouPas encore d'évaluation
- Dernier ExposeDocument8 pagesDernier ExposeAb DouPas encore d'évaluation
- Les Familles de Materiaux: Hhj$dhfuedhfueDocument40 pagesLes Familles de Materiaux: Hhj$dhfuedhfueAb DouPas encore d'évaluation
- CONCEPTION Bi RoueDocument3 pagesCONCEPTION Bi RoueAb DouPas encore d'évaluation
- Module 10 Marocetude - Com MATERIAUX ET METALLURGIE CM TSBECM PDFDocument138 pagesModule 10 Marocetude - Com MATERIAUX ET METALLURGIE CM TSBECM PDFAtef AboubPas encore d'évaluation
- CONCEPTION Bi RoueDocument3 pagesCONCEPTION Bi RoueAb DouPas encore d'évaluation
- Les Familles Des Matériaux 2Document22 pagesLes Familles Des Matériaux 2Ab DouPas encore d'évaluation
- TD 4 Loi Entrée Sortie Par Fermeture CinématiqueDocument2 pagesTD 4 Loi Entrée Sortie Par Fermeture CinématiqueAb DouPas encore d'évaluation
- TD 3 Loi Entrée Sortie Par Fermeture GéométriqueDocument4 pagesTD 3 Loi Entrée Sortie Par Fermeture GéométriqueChokri AtefPas encore d'évaluation
- Gauss SeidelDocument20 pagesGauss Seidelalaa chamsiPas encore d'évaluation
- CD EXT Annales 2010 QCMDocument14 pagesCD EXT Annales 2010 QCMdio98madPas encore d'évaluation
- Trigonométrie: Chapitre 2Document9 pagesTrigonométrie: Chapitre 2boucharebPas encore d'évaluation
- Corrige S Polyne Sie 14 Juin 2017 ADDocument10 pagesCorrige S Polyne Sie 14 Juin 2017 ADEsraa Ali MashaiPas encore d'évaluation
- CoursDocument12 pagesCours9jm5q4qj47Pas encore d'évaluation
- Cours Math - Chap 1 Produit Scalaire Dans Le Plan - 3ème Sciences (2009-2010) MR Abdelbasset LaataouiDocument7 pagesCours Math - Chap 1 Produit Scalaire Dans Le Plan - 3ème Sciences (2009-2010) MR Abdelbasset Laataouiوجدي ريدانPas encore d'évaluation
- Rapport Zeta TeamDocument25 pagesRapport Zeta TeamSow AbibalahiPas encore d'évaluation
- Corrigé Examen RDM ENP 2020Document4 pagesCorrigé Examen RDM ENP 2020AnisPas encore d'évaluation
- Planification ProjetDocument0 pagePlanification ProjetbkajjiPas encore d'évaluation
- Manuel Macros Xsteel 8Document69 pagesManuel Macros Xsteel 8Chaker Amir100% (1)
- Modelisation 19Document20 pagesModelisation 19Haitam El FathiPas encore d'évaluation
- ANA NUM 2 - Cours Approximation PolynômialeDocument9 pagesANA NUM 2 - Cours Approximation PolynômialeSab RinaPas encore d'évaluation
- Pour L'Obtention Du Doctorat en Science Économique: Ecole Nationale Superieure Du Pétrole Et Des MoteurvsDocument353 pagesPour L'Obtention Du Doctorat en Science Économique: Ecole Nationale Superieure Du Pétrole Et Des MoteurvsAmina BadaouiPas encore d'évaluation
- E141 TP Circuit RC Et CRDocument8 pagesE141 TP Circuit RC Et CRsihamarbaz14Pas encore d'évaluation
- T - 22 - Géométrie Vectorielle - BisDocument10 pagesT - 22 - Géométrie Vectorielle - BisidPas encore d'évaluation
- Serie 1 MProGCDocument2 pagesSerie 1 MProGCMedlemine AghrabattePas encore d'évaluation
- Mathématique Et CuisineDocument6 pagesMathématique Et CuisineAdaiki imanPas encore d'évaluation
- Le Tournant Cognitif en PragmatiqueDocument19 pagesLe Tournant Cognitif en PragmatiqueHélène-Marie JuteauPas encore d'évaluation
- TP3 Ti 2019Document3 pagesTP3 Ti 2019Babi BenPas encore d'évaluation
- TDTZDocument2 pagesTDTZShakib MesbahiPas encore d'évaluation
- CM AcoustiqueDocument72 pagesCM AcoustiqueNabila HamlilPas encore d'évaluation
- Cours Matlab M1ASEDocument15 pagesCours Matlab M1ASEHerton CarelPas encore d'évaluation
- 1-Reseaux Direct Reciproque Correction Devoir 1 PDFDocument2 pages1-Reseaux Direct Reciproque Correction Devoir 1 PDFSamah Samah100% (2)
- Micro ÉconomieDocument5 pagesMicro ÉconomieLéo NicolePas encore d'évaluation
- TD5 Equations Différentielles 22-23Document1 pageTD5 Equations Différentielles 22-23AHMED LEBBARPas encore d'évaluation