Vous aimerez peut-être aussi
- Chapitre II Dynamique 1ère PrépaDocument6 pagesChapitre II Dynamique 1ère PrépaChettibi Abdelah AzemPas encore d'évaluation
- Mecanique ClassiqueDocument7 pagesMecanique ClassiqueMEHDID100% (1)
- Chapitre 2 Dynamique Du Point MatérielDocument26 pagesChapitre 2 Dynamique Du Point Matérielsambe.elPas encore d'évaluation
- Cours Lois Newton ProfDocument5 pagesCours Lois Newton ProfPatrick HenryPas encore d'évaluation
- Postulats de Newton Et Mecanique QuantiqueDocument30 pagesPostulats de Newton Et Mecanique QuantiqueAnonymous N2qPpDqv0100% (1)
- La Masse PDFDocument66 pagesLa Masse PDFDeedee81100% (2)
- Mécanique Du Point Chapitre 2 PDFDocument54 pagesMécanique Du Point Chapitre 2 PDFIrma NazaPas encore d'évaluation
- Chapitre 5 Dynamique Du Point MatérielDocument13 pagesChapitre 5 Dynamique Du Point MatérielFaty TourePas encore d'évaluation
- Les Forces Et Le Principe DinertieDocument5 pagesLes Forces Et Le Principe DinertieSamira SLIMANEPas encore d'évaluation
- Séance 2Document4 pagesSéance 2Joseph ChemalyPas encore d'évaluation
- Cours Dynamique 2018 EleveDocument5 pagesCours Dynamique 2018 ElevePatrick HenryPas encore d'évaluation
- Dynamique Du Point Materiel 02Document23 pagesDynamique Du Point Materiel 02Bhan aa3Pas encore d'évaluation
- 3-Dynamique Du Point PDFDocument6 pages3-Dynamique Du Point PDFali akredPas encore d'évaluation
- 02 Dynamique Du PointDocument11 pages02 Dynamique Du Pointboukredimidjamel1958Pas encore d'évaluation
- Dynamique Du Point Materiel Cours PDFDocument2 pagesDynamique Du Point Materiel Cours PDFMohamed TdPas encore d'évaluation
- CHAP 7 Les ForcesDocument4 pagesCHAP 7 Les Forceshepived840Pas encore d'évaluation
- M06 - Mécanique Appliquée Et Résistance Des Matériaux - RésuméDocument20 pagesM06 - Mécanique Appliquée Et Résistance Des Matériaux - RésuméBadr EddinePas encore d'évaluation
- 4G Laboratoire Sur Les Frottements 2015-16Document6 pages4G Laboratoire Sur Les Frottements 2015-16Debaille FrédéricPas encore d'évaluation
- Energie MécaniqueDocument8 pagesEnergie MécaniquePierre CARREPas encore d'évaluation
- Chapitre 2Document4 pagesChapitre 2beloufaPas encore d'évaluation
- Dyn PMDocument8 pagesDyn PMAlina VetriceanPas encore d'évaluation
- M2 SiteDocument9 pagesM2 SiteKendry BenoitPas encore d'évaluation
- ExtraitDocument8 pagesExtraitManou JatawPas encore d'évaluation
- 2 ForceDocument10 pages2 Forcemamihax729Pas encore d'évaluation
- PhysiqueXXI TomeC Section 1.2Document9 pagesPhysiqueXXI TomeC Section 1.2Praveenking IruthayathasPas encore d'évaluation
- 09 - Lois de NewtonDocument12 pages09 - Lois de NewtonmohalilouivicPas encore d'évaluation
- Phys 040 PDFDocument19 pagesPhys 040 PDFRuben YavPas encore d'évaluation
- Chap. 06 - Lois de NewtonDocument54 pagesChap. 06 - Lois de NewtonKen Paolo DemandePas encore d'évaluation
- NYA - XXI - Chap 2.1Document9 pagesNYA - XXI - Chap 2.1Fendi WalidPas encore d'évaluation
- ILEPHYSIQUE Phys 2 Force Principe InertieDocument2 pagesILEPHYSIQUE Phys 2 Force Principe InertieMoussa Bana100% (1)
- Cours MECANIQUE CHP IIDocument7 pagesCours MECANIQUE CHP IIanicetkrokoPas encore d'évaluation
- Support de Cours DYNAMIQUE CopieDocument14 pagesSupport de Cours DYNAMIQUE CopieDjeti LabantePas encore d'évaluation
- COURS CinematiqueDocument24 pagesCOURS CinematiqueBéchir Soumaine HisseinPas encore d'évaluation
- Dynamique Du Point MatérielDocument9 pagesDynamique Du Point MatérielEmmanuel VovonouPas encore d'évaluation
- Chapitre 2 DynamiqueDocument33 pagesChapitre 2 Dynamiquemedjani007Pas encore d'évaluation
- Chap 3 PDFDocument6 pagesChap 3 PDFMohamed BenziadaPas encore d'évaluation
- Chapitre 3 Dynamique Physique1Document24 pagesChapitre 3 Dynamique Physique1big bossPas encore d'évaluation
- Chapitre IIIDocument10 pagesChapitre IIIAchiaou FahdPas encore d'évaluation
- CM - Analyse Du Mouvement: CHAP 1: Concepts de Base Et EMGDocument21 pagesCM - Analyse Du Mouvement: CHAP 1: Concepts de Base Et EMGClément LoisonPas encore d'évaluation
- Résumé CHAPITRE II Dynamique Du PointDocument4 pagesRésumé CHAPITRE II Dynamique Du Pointwissaldoukani524Pas encore d'évaluation
- Cours CG02Document11 pagesCours CG02Fabian CharlesPas encore d'évaluation
- Chap2 F E T CoursDocument11 pagesChap2 F E T CoursDjambou vaslande descieuxPas encore d'évaluation
- 1er Cours de PhysiqueDocument33 pages1er Cours de Physiqueskanderi mohamedPas encore d'évaluation
- Ondes v3Document42 pagesOndes v3Abder BenPas encore d'évaluation
- Cours de Mécanique Quantique UCAD 2020Document60 pagesCours de Mécanique Quantique UCAD 2020Moustapha MangassyPas encore d'évaluation
- Mesure de La Masse de La Terre: Physique ÉlémentaireDocument3 pagesMesure de La Masse de La Terre: Physique Élémentairebenedictionbarungu3Pas encore d'évaluation
- Chapitre1 CorrigéDocument12 pagesChapitre1 CorrigéTaha Abd El OuahadPas encore d'évaluation
- TD de Ondes Et VibrationsDocument1 pageTD de Ondes Et VibrationsRHB GHASSANPas encore d'évaluation
- Cours n1 DynamiqueDocument12 pagesCours n1 DynamiqueMoussa FreiheitPas encore d'évaluation
- Aihp 1961 17 1 13 0Document13 pagesAihp 1961 17 1 13 0MOZIKA BEKOPas encore d'évaluation
- Chapitre III - Dynamique 21 22Document29 pagesChapitre III - Dynamique 21 22David MbataPas encore d'évaluation
- Chapitre 1Document31 pagesChapitre 1Solaiman SlokovičPas encore d'évaluation
- Mecami 1Document15 pagesMecami 1Melek Melik100% (1)
- Chap3 Ntabti - Physique.voila - Net DynamiqueDocument6 pagesChap3 Ntabti - Physique.voila - Net DynamiquefatihamPas encore d'évaluation
- Dynamique Élémentaire Du Point Et Des SystèmesDocument26 pagesDynamique Élémentaire Du Point Et Des Systèmescont contaPas encore d'évaluation
- Usi Et ConstantesDocument6 pagesUsi Et Constantesapi-203629011Pas encore d'évaluation
- Physique Des Ondes II - 2A - Poly - 2022 2023Document48 pagesPhysique Des Ondes II - 2A - Poly - 2022 2023Tadessé NicolyPas encore d'évaluation
- ch4 Principes de La Mecanique ElDocument7 pagesch4 Principes de La Mecanique ElHAMADA1972Pas encore d'évaluation
- COURS TCS1 - Cahier D'activité 2023-2024 S2Document53 pagesCOURS TCS1 - Cahier D'activité 2023-2024 S2hmaitaneismailPas encore d'évaluation
- Relativité générale: Les Grands Articles d'UniversalisD'EverandRelativité générale: Les Grands Articles d'UniversalisPas encore d'évaluation
- Mémoire Fin ÉtudeDocument43 pagesMémoire Fin ÉtudeIsmaël WaldoPas encore d'évaluation
- Cours N°2 - GéophysiqueDocument69 pagesCours N°2 - GéophysiquearachidPas encore d'évaluation
- TD2 Igmp1 2019-2020Document2 pagesTD2 Igmp1 2019-2020Chaimae Ben hadouPas encore d'évaluation
- Semaine 12 - C12 - Rela - 21Document22 pagesSemaine 12 - C12 - Rela - 21Felix AFEKUPas encore d'évaluation
- S2 TLeAC 2024Document2 pagesS2 TLeAC 2024ahmadoulaminou068Pas encore d'évaluation
- BSP-740 1 PhysiqueDocument96 pagesBSP-740 1 PhysiquelandsheerePas encore d'évaluation
- Ecodis Fichea0Document2 pagesEcodis Fichea0Mohamed LahmoumiPas encore d'évaluation
- Note de Calcul Dalot MBIGOUDocument28 pagesNote de Calcul Dalot MBIGOUYannice Moufouma KombilaPas encore d'évaluation
- Exercice Cotation FonctionnelleDocument4 pagesExercice Cotation FonctionnelleYassine BouchattaPas encore d'évaluation
- Mini ProjetDocument25 pagesMini ProjetMed MaxPas encore d'évaluation
- Masterseal 590 PDFDocument2 pagesMasterseal 590 PDFyounesshammouyouPas encore d'évaluation
- Cours 1 - Détermination de La Résultante Des ForcesDocument8 pagesCours 1 - Détermination de La Résultante Des ForcesOumar SissokoPas encore d'évaluation
- Calculs de Poids Des Drillcollar de ForageDocument21 pagesCalculs de Poids Des Drillcollar de ForageFarah Azz100% (1)
- Cours Initiation Aux EC - ISTEUB-2020-2021Document33 pagesCours Initiation Aux EC - ISTEUB-2020-2021hassene elyassPas encore d'évaluation
- Test DDS 2012-2013IT2I - CorrectionDocument4 pagesTest DDS 2012-2013IT2I - CorrectionLoodji JerumePas encore d'évaluation
- 1 Résistance Des Matériaux Appliquée: Structures MétalliquesDocument23 pages1 Résistance Des Matériaux Appliquée: Structures MétalliquesMediterranei ExypniPas encore d'évaluation
- Exposé RDMDocument7 pagesExposé RDMabdullah boulifaPas encore d'évaluation
- 22norm ModeDocument9 pages22norm Modeviet khanh nguyenPas encore d'évaluation
- Calcul Au Vent NV65Document25 pagesCalcul Au Vent NV65MARZOUG MohammedPas encore d'évaluation
- Cor - TD Edo 2020 5 Exos3 4Document2 pagesCor - TD Edo 2020 5 Exos3 4Ahmed AbbassiPas encore d'évaluation
- Série ComplexeDocument5 pagesSérie ComplexeIyed GhabriPas encore d'évaluation
- Séquence CE1-CE2 Sur La Symétrie: Fiche 6Document10 pagesSéquence CE1-CE2 Sur La Symétrie: Fiche 6fddfsdfsfdsfPas encore d'évaluation
- 01ère Partie Du Cours de StratigraphieDocument11 pages01ère Partie Du Cours de StratigraphieSabi AbdouPas encore d'évaluation
- Cours - Automatique Ensa TetouanDocument162 pagesCours - Automatique Ensa TetouanmohamedPas encore d'évaluation
- Calcul SLTDocument11 pagesCalcul SLTMbgardPas encore d'évaluation
- Guidage en Rotation: Solutions Constructives Cours Feuille 1/11Document11 pagesGuidage en Rotation: Solutions Constructives Cours Feuille 1/11raouanemezianiPas encore d'évaluation
- Support - Cours - Nutrition - Metabolisme-1 - CopieDocument50 pagesSupport - Cours - Nutrition - Metabolisme-1 - Copienaima aminaPas encore d'évaluation
- Bentonite MS2 09Document10 pagesBentonite MS2 09Khlif NadaPas encore d'évaluation
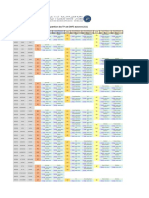
- Calendrier Prévisionel3 TP SMP3 CompressedDocument11 pagesCalendrier Prévisionel3 TP SMP3 CompressedTahar didouchPas encore d'évaluation
- L3E Algebre2 Cours 2016-2017Document25 pagesL3E Algebre2 Cours 2016-2017Joakim FontainePas encore d'évaluation