Vous aimerez peut-être aussi
- Cours 02Document8 pagesCours 02Emna Ben HammoudaPas encore d'évaluation
- Mecanique Des Solides RigidesDocument108 pagesMecanique Des Solides Rigidesahmedchamroukhi123Pas encore d'évaluation
- Cinematique Du Solide PDFDocument60 pagesCinematique Du Solide PDFSameh Oussama100% (5)
- CALCUL VECTORIEL - Corrigé1Document2 pagesCALCUL VECTORIEL - Corrigé1yasser bhPas encore d'évaluation
- Ravaux Irigés De: Exercice 1Document6 pagesRavaux Irigés De: Exercice 1Ahmed El Emir Akkah Akkah100% (1)
- 7 Translation VecteursDocument17 pages7 Translation VecteursbabisoPas encore d'évaluation
- Chapitre III Torseurs UVS 2022Document10 pagesChapitre III Torseurs UVS 2022Francois Henri NdionePas encore d'évaluation
- 2math 2Document3 pages2math 2BogdanClaudiuPas encore d'évaluation
- V1 - Bases de Calcul VectorielDocument5 pagesV1 - Bases de Calcul VectorielDamien MirandaPas encore d'évaluation
- Exam Mec G s1 2016 - 2017Document2 pagesExam Mec G s1 2016 - 2017Tino AlyPas encore d'évaluation
- EXS03Document3 pagesEXS03Lucas DupuisPas encore d'évaluation
- Cours Hydro MalherbeDocument110 pagesCours Hydro MalherbeKhelifi HarounePas encore d'évaluation
- Cours Hydro MalherbeDocument110 pagesCours Hydro MalherbeKhelifi HarounePas encore d'évaluation
- TD 1 MagDocument2 pagesTD 1 MagAbir BlPas encore d'évaluation
- A 2021 Rappel Mathemat I QuesDocument30 pagesA 2021 Rappel Mathemat I QuesIgnée FleurPas encore d'évaluation
- Chap II ELECTROSTATIQUEDocument10 pagesChap II ELECTROSTATIQUEcamarayacoubaalyPas encore d'évaluation
- DéterminantsDocument14 pagesDéterminantsibouPas encore d'évaluation
- Partie 1 - Chap 1 - de Mécanique Rationnelle-S1-TennougaL - CopieDocument20 pagesPartie 1 - Chap 1 - de Mécanique Rationnelle-S1-TennougaL - CopieRezig Ahmed KhodhirPas encore d'évaluation
- 2 - Champ Magnétique Crée Par Des Courants - EtudiantDocument41 pages2 - Champ Magnétique Crée Par Des Courants - EtudiantSi Møhamed HMPas encore d'évaluation
- Notes de Cours Les VecteursDocument30 pagesNotes de Cours Les VecteursGurlInpinkPas encore d'évaluation
- Bac C Maths 2009Document2 pagesBac C Maths 2009Christian BOSSE100% (1)
- TD - 2 - Mécanique Du SolideDocument3 pagesTD - 2 - Mécanique Du SolidehassegoutePas encore d'évaluation
- DDDDDDDocument2 pagesDDDDDDsaidPas encore d'évaluation
- Juin 08Document2 pagesJuin 08FabricePas encore d'évaluation
- Calcul Vectoriel Dans Le Plan Cours 1Document4 pagesCalcul Vectoriel Dans Le Plan Cours 1Oussama EljaafariPas encore d'évaluation
- E211 Outils Mathématiques Sept 2019Document14 pagesE211 Outils Mathématiques Sept 2019M'hammed AbouzianePas encore d'évaluation
- TD 1Document3 pagesTD 1mostakelanaPas encore d'évaluation
- Chapitre 1-Partie 1 - Formalisme Et Outils Mathã© MatiquesDocument16 pagesChapitre 1-Partie 1 - Formalisme Et Outils Mathã© MatiquesAbir BlPas encore d'évaluation
- Polycopié Des Travaux Dirigés de Mécanique Du PointDocument43 pagesPolycopié Des Travaux Dirigés de Mécanique Du PointNisrine Nisrinita50% (2)
- Concours National Commun: Notations Et RappelsDocument4 pagesConcours National Commun: Notations Et RappelsSALAH EDDINE ABBASSIPas encore d'évaluation
- Exercice 1: CPGE - LIT - Marrakech Statique TD1 Pcsi1 OuikassiDocument1 pageExercice 1: CPGE - LIT - Marrakech Statique TD1 Pcsi1 Ouikassiakarne Youness100% (1)
- Universite Cadi Ayyad Marrakech Facult e Des Sciences Et Techniques - D Epartement de Physique Appliqu EeDocument2 pagesUniversite Cadi Ayyad Marrakech Facult e Des Sciences Et Techniques - D Epartement de Physique Appliqu EeKarim RadiPas encore d'évaluation
- DS DDS M2102 GMP1 2015-16Document2 pagesDS DDS M2102 GMP1 2015-16Romain GicquiauxPas encore d'évaluation
- Prã©paration Concours 2020 Cinã©matique Des Solides FormulaireDocument12 pagesPrã©paration Concours 2020 Cinã©matique Des Solides FormulaireNowe AhmadePas encore d'évaluation
- 3 - Vecteurs Droites Plans de L'espace - AnnotéDocument16 pages3 - Vecteurs Droites Plans de L'espace - Annotédieudonnee.petitPas encore d'évaluation
- DS4-1-rail de Laplace (CCP National Deug 2005) - CorrigeDocument3 pagesDS4-1-rail de Laplace (CCP National Deug 2005) - CorrigeChrys Trukfit100% (1)
- Cours Dispositifs ÉlectrotechniqueDocument21 pagesCours Dispositifs ÉlectrotechniqueAymard MougouPas encore d'évaluation
- Bac C Et e 2005 Maths Sujet Et Corrige GabonDocument8 pagesBac C Et e 2005 Maths Sujet Et Corrige GabonAbdoul-lahi Saâdou Moussa100% (3)
- Sujet de Révision n1 Maths 2Document6 pagesSujet de Révision n1 Maths 2BTS & ARMYPas encore d'évaluation
- L1 MVT TD1Document7 pagesL1 MVT TD1Aïmane CheikhPas encore d'évaluation
- TD-00Document1 pageTD-00Fizazi BoualamPas encore d'évaluation
- Chapitre 1Document11 pagesChapitre 1badia mahmoudiPas encore d'évaluation
- Universite Pierre Et Marie CurieDocument3 pagesUniversite Pierre Et Marie Curiebelhagemohamad61Pas encore d'évaluation
- COURS DE MECANIQUE DES SYSTEMES - WnzieDocument144 pagesCOURS DE MECANIQUE DES SYSTEMES - WnzieEric FongaPas encore d'évaluation
- Série 2Document4 pagesSérie 2samiasomatipro23Pas encore d'évaluation
- Chapitre3 (Vecteurs Et Repérage)Document7 pagesChapitre3 (Vecteurs Et Repérage)medPas encore d'évaluation
- 6 Scalaires Et Vecteurs PDFDocument9 pages6 Scalaires Et Vecteurs PDFkim0% (1)
- CNC MP 2012 Maths 2 EpreuveDocument5 pagesCNC MP 2012 Maths 2 Epreuvesemeh sghaierPas encore d'évaluation
- TD2 Cinematique API1Document3 pagesTD2 Cinematique API1Marwane FakirPas encore d'évaluation
- Analyse en Composantes Principales (ACP)Document42 pagesAnalyse en Composantes Principales (ACP)FARAH BENDALIPas encore d'évaluation
- TD MagnetismeDocument19 pagesTD MagnetismeSarra BessadokPas encore d'évaluation
- °°cours Mecanique Solide FPK Sma4 2020Document43 pages°°cours Mecanique Solide FPK Sma4 2020eabdellatifPas encore d'évaluation
- 1G Cours Chapitre 9 IDocument11 pages1G Cours Chapitre 9 IMesum AbbasPas encore d'évaluation
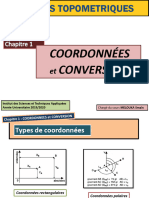
- CalTopo Chap 1Document7 pagesCalTopo Chap 1benamourbilalPas encore d'évaluation
- Rattrapage + Corrigé de Physique 1 ST 2008-2009 - Université de Béjaia PDFDocument4 pagesRattrapage + Corrigé de Physique 1 ST 2008-2009 - Université de Béjaia PDFRai newPas encore d'évaluation
- 5 Mathematiques Notes de Cours 4Document12 pages5 Mathematiques Notes de Cours 4omar amarPas encore d'évaluation
- Devoir de Maths Tle CDocument2 pagesDevoir de Maths Tle CykablanangelaurentPas encore d'évaluation
- Chap1 TorseursDocument38 pagesChap1 TorseursChafik Abid100% (1)
- Annales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésD'EverandAnnales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- Chapitre3 PFSDocument10 pagesChapitre3 PFSmarouaPas encore d'évaluation
- Chapitre2 StheniqueDocument22 pagesChapitre2 StheniquemarouaPas encore d'évaluation
- Chapitre 11-Modélisation Du FrottementDocument19 pagesChapitre 11-Modélisation Du FrottementAnonymous iLzWrO5hdPas encore d'évaluation
- Exercices 2Document6 pagesExercices 2marouaPas encore d'évaluation
- PV Liste-De-Prix Onduleurs HUAWEI 11-2023 FRDocument2 pagesPV Liste-De-Prix Onduleurs HUAWEI 11-2023 FRkoumbounisdimPas encore d'évaluation
- The Cuban Missile CrisisDocument8 pagesThe Cuban Missile Crisismilan.bodis523Pas encore d'évaluation
- 3 Partie Caractéristiques Des LubrifiantDocument32 pages3 Partie Caractéristiques Des Lubrifiantsamir belamriPas encore d'évaluation
- Mesure de Compression Moteur Vers FinaleDocument46 pagesMesure de Compression Moteur Vers FinaleRaouf HarzallahPas encore d'évaluation
- Process AciérieDocument6 pagesProcess Aciériesanae jaouiPas encore d'évaluation
- Cahier D Exercices Ile Aux Mots 8hDocument88 pagesCahier D Exercices Ile Aux Mots 8hCizPas encore d'évaluation
- ALIZE LCPC MU v1.5 FR PDFDocument116 pagesALIZE LCPC MU v1.5 FR PDFSoumana Abdou100% (1)
- Exam. F.CDocument2 pagesExam. F.CmidsmasherPas encore d'évaluation
- Racines Carrees BaseDocument8 pagesRacines Carrees Basejulien9562Pas encore d'évaluation
- Les Étapes de Formation Des Roches SédimentaireDocument2 pagesLes Étapes de Formation Des Roches Sédimentairehamada2002Pas encore d'évaluation
- Caplp Externe Genie Electrique Electrotechnique Et Energie Epreuve 1 Doc RessourcesDocument28 pagesCaplp Externe Genie Electrique Electrotechnique Et Energie Epreuve 1 Doc RessourcesOus SàmàPas encore d'évaluation
- AnnexeDocument168 pagesAnnexeMoez AliPas encore d'évaluation
- Thèse Data IntegrityDocument83 pagesThèse Data IntegrityBasma YagoubiPas encore d'évaluation
- Correction DevoirDeSyntheseN3 1AS 2009 FinDocument8 pagesCorrection DevoirDeSyntheseN3 1AS 2009 FinMehdi Ben Arif67% (3)
- Observons:: Nature Du Complément Circonstanciel de TempsDocument2 pagesObservons:: Nature Du Complément Circonstanciel de TempsMehdi YMPas encore d'évaluation
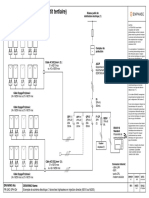
- 3 Branches Triphasées en Injection Directe M215 Ou M250Document1 page3 Branches Triphasées en Injection Directe M215 Ou M250MbgardPas encore d'évaluation
- 2nd - Exercices Corrigés - Variations D'une FonctDocument1 page2nd - Exercices Corrigés - Variations D'une Fonctalyahmed610Pas encore d'évaluation
- Canalisations de Gaz NaturelDocument120 pagesCanalisations de Gaz NaturelJean-David DelordPas encore d'évaluation
- Depliant ELM MasterDocument3 pagesDepliant ELM MasterYazid AbouchihabeddinePas encore d'évaluation
- Af Sen GaeDocument42 pagesAf Sen GaeعبداللهبنزنوPas encore d'évaluation
- Format Eur FrancaiseDocument1 pageFormat Eur FrancaiseAdnan NandaPas encore d'évaluation
- Prise en Main de Microsoft Office Excel 2016Document713 pagesPrise en Main de Microsoft Office Excel 2016max80% (5)
- Exercice D'application Optique VDocument1 pageExercice D'application Optique VARDALAn MohamedPas encore d'évaluation
- Observatoire National de La Filiere Riz Du Burkina Faso (Onriz)Document6 pagesObservatoire National de La Filiere Riz Du Burkina Faso (Onriz)toni_yousf2418Pas encore d'évaluation
- Marry Your Daughter Sheet - 1Document2 pagesMarry Your Daughter Sheet - 1Nurendung ZuliantoPas encore d'évaluation
- Calendrier Des Examens Semestre Impair Janvier 2022 AlphaDocument28 pagesCalendrier Des Examens Semestre Impair Janvier 2022 AlphaMeg JustMegPas encore d'évaluation
- Controle Et Suivi Chantier RoutierhjhDocument14 pagesControle Et Suivi Chantier Routierhjhعثمان البريشيPas encore d'évaluation
- Introduction À La RobotiqueDocument19 pagesIntroduction À La RobotiqueRazzougui SarahPas encore d'évaluation
- Exposé MDE Et Énergie RenouvelablesDocument12 pagesExposé MDE Et Énergie Renouvelablesromain fokamPas encore d'évaluation
- TP2Document4 pagesTP2Youssef Don RajawiPas encore d'évaluation