Vous aimerez peut-être aussi
- Manuel Exercices SolutionsDocument12 pagesManuel Exercices SolutionssaidPas encore d'évaluation
- Ben Hamed Partie 3Document34 pagesBen Hamed Partie 3DABAKH LDEEBOYPas encore d'évaluation
- TD 3Document2 pagesTD 3imane ait baddouPas encore d'évaluation
- Moteurs Asynchrones Triphasés CorrigéDocument12 pagesMoteurs Asynchrones Triphasés Corrigéffa46701Pas encore d'évaluation
- TD Solitio TurbomachineDocument6 pagesTD Solitio TurbomachineYahiyaoui SofyanePas encore d'évaluation
- TD1 Remontée Mécanique CorrectionDocument5 pagesTD1 Remontée Mécanique Correctionperol100% (1)
- Transmission de PuissanceDocument111 pagesTransmission de PuissanceSaley NouroudinePas encore d'évaluation
- Dimensionnement D'un Systeme D Entraînement: Exercice #1Document24 pagesDimensionnement D'un Systeme D Entraînement: Exercice #1Fethi Baroudi50% (4)
- CH04 CorrectionDocument4 pagesCH04 CorrectionKINGTPas encore d'évaluation
- Comportement Global D Un Circuit Electrique Exercices Corriges 1Document12 pagesComportement Global D Un Circuit Electrique Exercices Corriges 1SOUADPas encore d'évaluation
- Corrigé Série D'exercices N°1 Et 2 - PC - Dr. Karam OuharouDocument6 pagesCorrigé Série D'exercices N°1 Et 2 - PC - Dr. Karam OuharouKaram OUHAROUPas encore d'évaluation
- 1946906986Document12 pages1946906986Nourii Nour-dinePas encore d'évaluation
- Travail À Rendre 2:: 1. Questions de CoursDocument5 pagesTravail À Rendre 2:: 1. Questions de CoursEs.sabery IsmailPas encore d'évaluation
- Calcul VerinDocument2 pagesCalcul VerinrabehvillaPas encore d'évaluation
- C1 MachElec CorrigeDocument6 pagesC1 MachElec Corrigeissam elmoharirPas encore d'évaluation
- 02AC2.3 - Exercices Puissance - PROFDocument4 pages02AC2.3 - Exercices Puissance - PROFSewa MensahPas encore d'évaluation
- 10 - Corrigé Exam BLANC MOTEUR 2020Document9 pages10 - Corrigé Exam BLANC MOTEUR 2020Mathieu DouPas encore d'évaluation
- A18 Final SY03 - Correction (Version Étudiant)Document4 pagesA18 Final SY03 - Correction (Version Étudiant)周cgPas encore d'évaluation
- TD MCCDocument9 pagesTD MCCkamalPas encore d'évaluation
- TP 2 Tapis RoulantDocument11 pagesTP 2 Tapis RoulantCygnus 442Pas encore d'évaluation
- TP Final Dynamique Des MachinesDocument7 pagesTP Final Dynamique Des MachinesDjafar Christophe UmbaPas encore d'évaluation
- Dimensionnement D Un Systeme D EntrainementDocument11 pagesDimensionnement D Un Systeme D EntrainementbacimovitchPas encore d'évaluation
- TD01CV23mars - Generatrice AsynchroneDocument6 pagesTD01CV23mars - Generatrice AsynchronefrPas encore d'évaluation
- Correc Examen2015Document4 pagesCorrec Examen2015Salma RyaniPas encore d'évaluation
- 5-MCC Exos CorrDocument8 pages5-MCC Exos CorrAbou AboubakerPas encore d'évaluation
- Exercices Moteur AsynchroneDocument3 pagesExercices Moteur AsynchroneChakib Ka100% (1)
- Identification Paramétres&Simulation MATLAB MAS Errami AdilDocument26 pagesIdentification Paramétres&Simulation MATLAB MAS Errami AdilAnass TaiboubiPas encore d'évaluation
- CR MagriDocument3 pagesCR MagriAmechghal LahcenPas encore d'évaluation
- Corrigé TD MAS TEER S5 2020Document8 pagesCorrigé TD MAS TEER S5 2020Harry PoterPas encore d'évaluation
- Rapport de Mini Projet DDocument17 pagesRapport de Mini Projet DOumar TraoréPas encore d'évaluation
- Rapport de Mini Projet DDocument17 pagesRapport de Mini Projet DOumar TraoréPas encore d'évaluation
- Exercices Moteur AsynchroneDocument3 pagesExercices Moteur AsynchroneSamuel Gleize100% (3)
- ATD03 Avec SolutionDocument7 pagesATD03 Avec Solutionbaya eltPas encore d'évaluation
- Sans TitreDocument7 pagesSans TitrePap's RM-Pas encore d'évaluation
- TP 2Document5 pagesTP 2Hamza HachimPas encore d'évaluation
- Commande Machines - Serie 2 - Exo 3Document2 pagesCommande Machines - Serie 2 - Exo 3Aya IrmaPas encore d'évaluation
- TP Olienne PalesDocument6 pagesTP Olienne PalesReda SebaaPas encore d'évaluation
- ODM Ertan Devoir Examen Final 2024-01-01 13 - 53 - 32Document12 pagesODM Ertan Devoir Examen Final 2024-01-01 13 - 53 - 32aymandakikzaeriaPas encore d'évaluation
- Batteur Transmission CorrigeDocument7 pagesBatteur Transmission CorrigeHassanbfk BfkPas encore d'évaluation
- Correction TD Capteur Actionneur 22042020 PDFDocument4 pagesCorrection TD Capteur Actionneur 22042020 PDFAmdouni AmeniPas encore d'évaluation
- Bac2014 Remplacement Metropole Ferme Searev CorrectionDocument13 pagesBac2014 Remplacement Metropole Ferme Searev CorrectionkamalPas encore d'évaluation
- Exercices Moteur Asynchrone PDFDocument3 pagesExercices Moteur Asynchrone PDFMimo Molio100% (1)
- III. Calcul Des RessortsDocument3 pagesIII. Calcul Des RessortsSamar ArbiPas encore d'évaluation
- Choix Et Dimensionnement Des Actionneurs Et Des Accessoires Du Circuit Hydraulique Du Chargeur Sur ChenilleDocument16 pagesChoix Et Dimensionnement Des Actionneurs Et Des Accessoires Du Circuit Hydraulique Du Chargeur Sur Chenillejannane50% (2)
- TD Entrainement Électrique Avec SolutionDocument5 pagesTD Entrainement Électrique Avec SolutionBensalemPas encore d'évaluation
- Rapport TPDocument17 pagesRapport TPAhmed JellouliPas encore d'évaluation
- TPPUISSANCEdémarreur CorrigéDocument7 pagesTPPUISSANCEdémarreur CorrigémarielebihanlpPas encore d'évaluation
- Tp3 Mas CaractDocument5 pagesTp3 Mas CaractDaly ZeddiniPas encore d'évaluation
- Dimensionnement D Un Systeme D EntrainementDocument11 pagesDimensionnement D Un Systeme D Entrainementmahdi hadhriPas encore d'évaluation
- Td1 Avec SolutionDocument5 pagesTd1 Avec SolutionIslam MęĐjPas encore d'évaluation
- 2019 - Annales M1 Et L3 ELT - Machines ÉlectriquesDocument152 pages2019 - Annales M1 Et L3 ELT - Machines Électriquesabdelilah.hassounePas encore d'évaluation
- A20 Final SY03 Avec Corrigé (Version Étudiant)Document6 pagesA20 Final SY03 Avec Corrigé (Version Étudiant)周cgPas encore d'évaluation
- Compte Rendu BU TIZIT-ABIRDocument10 pagesCompte Rendu BU TIZIT-ABIRabir melouanePas encore d'évaluation
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- 15e Inventaire Chap03 3.4.3 ChiliDocument2 pages15e Inventaire Chap03 3.4.3 ChiliBouasria BOUASRIAPas encore d'évaluation
- Convention PIFE 2023Document2 pagesConvention PIFE 2023Bouasria BOUASRIAPas encore d'évaluation
- Formulaire de Demande Stage Soulaimane BouasriaDocument1 pageFormulaire de Demande Stage Soulaimane BouasriaBouasria BOUASRIAPas encore d'évaluation
- Convention PIFE 2023Document2 pagesConvention PIFE 2023Bouasria BOUASRIAPas encore d'évaluation
- Management Des Risques de L'entreprise en Lien Avec La Norme Iso/Dis 9001:2015Document35 pagesManagement Des Risques de L'entreprise en Lien Avec La Norme Iso/Dis 9001:2015Hay ThemPas encore d'évaluation
- Chap2 Le Courant ElectriqueDocument4 pagesChap2 Le Courant ElectriqueBouasria BOUASRIAPas encore d'évaluation
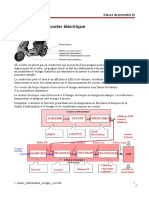
- 1-Chaine Information Energie CorrDocument3 pages1-Chaine Information Energie CorrBouasria BOUASRIAPas encore d'évaluation
- Convocation Entretien 2Document1 pageConvocation Entretien 2Bouasria BOUASRIAPas encore d'évaluation
- 1-Chaine Information Energie CorrDocument3 pages1-Chaine Information Energie CorrBouasria BOUASRIAPas encore d'évaluation
- Commande Du Système de Suspension D'un Véhicule: Université Kasdi Merbah - OuarglaDocument42 pagesCommande Du Système de Suspension D'un Véhicule: Université Kasdi Merbah - OuarglaChaouki Boussadia100% (1)
- Résumé Moteur Asynchrone Avec ExercicesDocument5 pagesRésumé Moteur Asynchrone Avec ExercicesjamesPas encore d'évaluation
- Vente Du Samedi 29 Avril 2023 À 9:00: Vente Aux Encheres PubliquesDocument22 pagesVente Du Samedi 29 Avril 2023 À 9:00: Vente Aux Encheres PubliquesJonathan GassonPas encore d'évaluation
- T Roc 2Document38 pagesT Roc 2Naam VanPas encore d'évaluation
- Cours Sur Les Machines Synchrones Triphasés - Vesion3 - 2Document26 pagesCours Sur Les Machines Synchrones Triphasés - Vesion3 - 2Mohamed Berrached100% (1)
- TD 1 Mécanique Du PointDocument4 pagesTD 1 Mécanique Du Pointyassir100% (1)
- Acoustique Des VéhiculesDocument4 pagesAcoustique Des Véhiculeslifefoot6Pas encore d'évaluation
- XT 500Document46 pagesXT 500Róbert TóhátiPas encore d'évaluation
- Evaluation Roulement AjustementDocument1 pageEvaluation Roulement AjustementElla Kabongo100% (2)
- Revue Technique Bandit 650Document226 pagesRevue Technique Bandit 650Killian ElaidousPas encore d'évaluation
- Force de FreinageDocument14 pagesForce de FreinageZakariaBenPas encore d'évaluation
- BarriereDocument19 pagesBarriereZINEB AZPas encore d'évaluation
- Minipelles JCB 8025 8030 8035 ZTS 52518 102014Document12 pagesMinipelles JCB 8025 8030 8035 ZTS 52518 102014Alain GARNIERPas encore d'évaluation
- Amdec PompesDocument38 pagesAmdec PompesDhia Boubakri71% (7)
- 2eme Route TajhizDocument46 pages2eme Route TajhizjecakaPas encore d'évaluation
- Caractéristiques: GénéralitésDocument28 pagesCaractéristiques: GénéralitésmawoussiborisPas encore d'évaluation
- Le Système BielleDocument2 pagesLe Système BielledjalikadjouPas encore d'évaluation
- Rechercher: 6 196,200 TND 5 576,580 TNDDocument1 pageRechercher: 6 196,200 TND 5 576,580 TNDissam babbouPas encore d'évaluation
- Deadlands Reloaded - 3 - Les Derniers FilsDocument306 pagesDeadlands Reloaded - 3 - Les Derniers FilsJulien BARBIER100% (1)
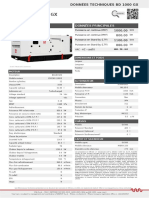
- GALAXY - BD 1000 GX - GX - 400V - 50Hz - FRDocument1 pageGALAXY - BD 1000 GX - GX - 400V - 50Hz - FRgati thauvoyePas encore d'évaluation
- Location de VoitureDocument2 pagesLocation de VoitureromainPas encore d'évaluation
- Corrigé - TD Gestion Du TransportDocument5 pagesCorrigé - TD Gestion Du TransportTaha Bamohamed75% (4)
- S08 Diesel Power PackDocument164 pagesS08 Diesel Power PackESRAPas encore d'évaluation
- Fiche - Technique - CS3 CC2 PDFDocument2 pagesFiche - Technique - CS3 CC2 PDFmezouedPas encore d'évaluation
- 01 33 301H - Classes Caracteristiques Documents Be FRDocument14 pages01 33 301H - Classes Caracteristiques Documents Be FR57641Pas encore d'évaluation
- Presse Compréh Art La MotoneigeDocument5 pagesPresse Compréh Art La MotoneigeGabriel VanhoutePas encore d'évaluation
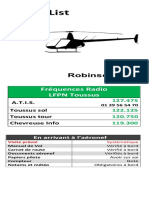
- Robinson Check-R22Document26 pagesRobinson Check-R22JP JPPas encore d'évaluation
- Equilibrage Et Alignement Des MachinesDocument79 pagesEquilibrage Et Alignement Des MachinesWalid BelaaziPas encore d'évaluation
- Om EvenDocument26 pagesOm EvenJefri SuwitaPas encore d'évaluation
- Chapitre 13 Les AccouplementsDocument6 pagesChapitre 13 Les Accouplementsbarryhamadounallaye1Pas encore d'évaluation