Académique Documents
Professionnel Documents
Culture Documents
011 Dynamique Rotor PDF
Transféré par
Abdelkader MebarkiTitre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
011 Dynamique Rotor PDF
Transféré par
Abdelkader MebarkiDroits d'auteur :
Formats disponibles
Raffinage-Pétrochimie-Chimie-Ingénierie
———-
SONATRACH/IAP-CU
Boumerdes
COMPRESSEURS CENTRIFUGES ET TURBINES À VAPEUR
DYNAMIQUE DE ROTOR ET SURVEILLANCE VIBRATOIRE
I - ROTORS ET PALIERS ............................................................................................................. 1
1 - Rotors ...........................................................................................................................................1
2 - Paliers radiaux et butées.............................................................................................................. 3
3 - Accouplements .............................................................................................................................7
4 - Lignes d’arbres .............................................................................................................................7
II - DYNAMIQUE DE ROTOR ......................................................................................................... 8
1 - Vibrations .....................................................................................................................................8
2 - Méthodes de calcul des fréquences propres................................................................................9
3 - Vibrations de flexion ...................................................................................................................13
4 - Équilibrage dynamique ...............................................................................................................22
5 - Vibrations de torsion...................................................................................................................25
III - SURVEILLANCE DE LIGNE D’ARBRE................................................................................... 29
1 - Surveillance générale des lignes d’arbres..................................................................................29
2 - Surveillance vibratoire ................................................................................................................ 29
3 - Surveillance acoustique .............................................................................................................31
MT COM - 03026_A_F - Rév. 1 03/12/2005
2005 ENSPM Formation Industrie - IFP Training
1
I- ROTORS ET PALIERS
1- ROTORS
Les rotors des turbomachines, compresseurs centrifuges ou turbines à vapeur, sont des composants
soumis à des vitesses de rotation élevées, nécessitées par l’échange d’énergie entre le fluide à
comprimer ou détendre et les aubes tournantes (transformation entre énergie cinétique et niveau de
pression par l’enthalpie).
Les rotors se composent d’arbre, et de pièces tournantes assemblées. Les rotors sont tenus en
position dans les enveloppes par des paliers radiaux, et par une butée dans la direction axiale. Un
accouplement assure la transmission en rotation.
a - Compresseurs centrifuges
L’arbre est forgé dans un matériau dont la nuance dépend de la nature du gaz à comprimer, et des
conditions de fonctionnement. Pour un gaz doux, les aciers faiblement alliés (aciers au chrome
molybdène) conviennent. Pour les gaz acides, on peut également utiliser les mêmes nuances que pour
les roues (paragraphe suivant).
Les roues sont frettées sur l’arbre par chauffage après l’essai de survitesse. Le frettage installé doit
être suffisant pour assurer l’entraînement en rotation (couple gaz) et la position axiale (poussée axiale)
dans les conditions de fonctionnement (effets centrifuges dus à la rotation, dilatation thermique due à
la distribution de température et champs de pression sur la roue et les aubes).
Pour des raisons de sécurité, et pour faciliter l’assemblage sur l’arbre, des entretoises sont utilisées
entre les roues, et des clavettes sont installées pour fixer la position angulaire des roues. Le matériau
des roues, la méthode d’assemblage du flasque (soudure, brasure), et le traitement thermique
correspondant sont choisis selon la nature du gaz. Pour les gaz doux, les aciers faiblement alliés
(aciers au chrome molybdène) conviennent.
D T 1764 A
Rotor de compresseur centrifuge
Pour les gaz acides contenant du sulfure d’hydrogène mais sans chlorures, un acier inoxydable
martensitique (16 % de chrome) est nécessaire pour résister à la corrosion sous tension. Pour les gaz
acides humides avec beaucoup de chlorures, les aciers austénoferritiques (structure duplex) peuvent
s’avérer nécessaires pour empêcher la corrosion par piqûration et la corrosion sous tension. À très
basse température, on utilise des aciers au nickel.
03026_A_F © 2005 ENSPM Formation Industrie - IFP Training
2
Les compresseurs spéciaux peuvent avoir un rotor à rigidité augmentée, sans entretoises entre les
roues, afin d’augmenter au maximum le diamètre d’arbre, pour des raisons de dynamique de rotor
(compresseurs à haute pression pour les applications de réinjection de gaz par exemple). Dans ce
cas, la veine aérodynamique est usinée dans l’arbre à l’ouïe des roues. Des anneaux axiaux de
cisaillement remplacent les entretoises pour assurer la sécurité axiale.
D T 1764 B
Rotor de compresseur centrifuge avec arbre à rigidité augmentée
Les autres principaux composants tournants assemblés sur l’arbre sont :
- le collet de butée
- les pièces en rotation des garnitures d’étanchéité de bouts d’arbre
- le piston d’équilibrage axial
- le(s) moyeu(x) d’accouplement
b - Turbines à vapeur
Les rotors des turbines à vapeur sont généralement forgés d’une seule pièce. Le matériau est un acier
faiblement allié ou allié (nuance au molybdène chrome nickel). La nuance est choisie selon les
conditions de fonctionnement, en considérant le fluage pour les températures élevées (supérieures à
430°C), et la température de transition de la résilience pour les turbines à condensation.
D T 1765 A
Rotor de turbine à vapeur industrielle
Les “petites” turbines à vapeur (de puissance inférieure à 1500 kW) qui n’ont qu’un ou deux étages
peuvent avoir des disques frettés.
Les aubes tournantes sont montées à la périphérie des disques par différents types de pieds (en forme
de “té”, ou pieds à fourche, ou pieds “sapin”, voire même usinés directement dans le disque), suivant
les conditions de fonctionnement (efforts centrifuges, forces vapeur, et type d’étage – étage de
régulation d’une turbine à injection partielle, étage courant, ou dernier étage).
03026_A_F © 2005 ENSPM Formation Industrie - IFP Training
3
La nuance utilisée généralement pour les aubes est un acier inoxydable martensitique (acier à 13 %
de chrome), avec d’autres éléments d’alliage afin d’améliorer la résistance au fluage pour les aubes à
haute température (addition de niobium), ou la résistance mécanique pour les aubes basse pression
(matériau à durcissement structurel), ou résistance à la corrosion (molybdène).
Les autres composants montés sur le rotor sont :
- le collier de butée (si non monobloc)
- le système de protection contre les survitesses
- le moyeu d’accouplement
2- PALIERS RADIAUX ET BUTÉES
Ils sont destinés à sustenter le rotor dans le corps, et pour générer l’amortissement nécessaire pour
assurer un comportement vibratoire sain de la machine.
Les principales techniques disponibles sont :
- les roulements à billes - cette technique est utilisée pour les moteurs aéronautiques,
l’amortissement est fourni par des squeeze films
- les paliers hydrostatiques à huile, qui n’ont pas de capacité suffisante d’amortissement en
turbomachine, et qui ne sont généralement utilisés dans ce domaine que pour soulever le
rotor à l’arrêt avant de démarrer la machine
- les paliers hydrodynamiques à huile, qui sont le plus généralement utilisés en turbomachine
- les paliers magnétiques actifs
a - Paliers radiaux
• Paliers hydrodynamiques
Plusieurs types de techniques peuvent être employés.
L’ordre la complexité croissante est le suivant :
- les paliers lisses sont bon marché, mais ils sont également “célèbres” pour leur capacité à
générer des vibrations subsynchrones dues au phénomène de tourbillon d’huile (parfois, les
constructeurs américains utilisent cette technique associée à des amortisseurs à squeeze
film)
- les paliers à lobes à géométrie fixe (patins fixes). La variation du jeu dans l’interface permet
de contrôler la rupture du film d’huile, ce qui stabilise le palier (faible raideur croisée). Le
palier le plus simple de ce type n’a que deux lobes symétriques (type elliptique ou “citron”)
ou non symétriques (palier semi-décalé), mais d’autres types (3 ou 4 lobes inclinés
asymétriques) sont plus complexes
- les paliers à patins oscillants sont plus complexes à fabriquer et à dimensionner. Mais ils
ont les meilleures caractéristiques dynamiques vis-à-vis de la dynamique de rotor (capacité
élevée d’amortissement, et raideur croisée négligeable). Ces caractéristiques sont pilotées
par trois paramètres principaux (le jeu, la précharge géométrique et le décalage de pivot)
Les paliers radiaux doivent résister au poids du rotor, aux autres chargements de fonctionnement
(injection partielle des turbines à vapeur industrielles par exemple), et aux forces dynamiques dues à
la rotation (balourds et vibrations). Alimentés en huile à basse pression (en général 1,5 bar), ils
génèrent, par effet de viscosité en rotation, des pressions spécifiques moyennes d’environ 20 bar pour
porter le rotor, et même de 80 bar sous conditions dynamiques extrêmes (perte d’aube).
03026_A_F © 2005 ENSPM Formation Industrie - IFP Training
4
Tilting pad bearings Fixed arc bearings
Centre pivot Offset pivot
Direction of shaft rotation Direction of shaft rotation
3 pads
Elliptical Offset halves
4 pads
Three lobe Tilted three lobe
5 pads
6 pads Four lobe Tilted four lobe
D T 1766 A
Différents types de paliers radiaux hydrodynamiques
D T 1767 A
Paliers et buées à patins oscillants
03026_A_F © 2005 ENSPM Formation Industrie - IFP Training
5
Le bon fonctionnement des paliers hydrodynamiques exige une alimentation d’huile :
- à pression stabilisée
- à température stabilisée (pour maintenir la viscosité, et pour le métal blanc des coussinets)
- filtrée
- désaérée (ou gaz) pour éviter des émulsions
- non polluée (les gaz de procédé dissous dans l’huile, ou la présence de l’humidité, modifient
l’effet des additifs)
- fiable
Par conséquent, les systèmes d’huile des turbomachines industrielles (par exemple conçues suivant la
spécification API 614), et leurs systèmes de contrôle associés, sont d’une grande importance.
• Paliers magnétiques actifs
Il existe différents types de paliers magnétiques. Les paliers passifs utilisent un procédé par répulsion,
mais exige des aimants permanents embarqués sur le rotor. Cette technique est utilisée pour des
applications spatiales, parce que son système de commande est très simple.
Les paliers magnétiques actifs, technique la plus utilisée en turbomachine, utilisent un procédé
d’attraction par des électroaimants radiaux, installés autour de la partie tournante (paliers
d’ACTYDYNE de S2M, voir schéma page suivante). À l’arrêt, la résultante des différentes forces
électromagnétiques est le poids du rotor. Puisque le procédé d’attraction est instable, un système de
contrôle sophistiqué est installé (les capteurs mesurent la position de rotor à l’intérieur du palier, et un
régulateur contrôle le courant à envoyer à chaque électroaimant).
En dynamique, les électroaimants développent les forces de réaction nécessaires, dans la limite de
leur capacité de raideur et d’amortissement, découlant des réglages du régulateur (gain, actions
intégrale et dérivée).
Les paliers magnétiques actifs n’ont pas la capacité de charge des paliers hydrodynamiques. Si le flux
magnétique atteint la saturation du matériau, le palier décrochera, au lieu d’avoir une forte capacité de
surcharge. Des paliers auxiliaires sont installés pour empêcher de tels phénomènes, et également
pour poser le rotor à l’arrêt. L’expérience de THERMODYN du fonctionnement de quatre
compresseurs équipés de paliers magnétiques actifs (le compresseur centrifuge libre d’huile a
largement plus de 100000 heures de marche) est qu’aucun atterrissage ne s’est jamais produit.
Dans le cas de la turbine à vapeur entraînant un alternateur, la conception des paliers auxiliaires est
plus difficile, parce que aucun frein ne diminue la vitesse de rotation (comme dans le cas d’une ligne
de compression, qui garde le couple résistant du compresseur) en cas d’incident ou de
déclenchement.
D’autre part, les systèmes de contrôle commande sont maintenant des calculateurs numériques, qui
confèrent une grande flexibilité pour l’adaptation et les réglages.
Les paliers magnétiques ont des domaines d’application spécifiques, dans lesquels ils sont
particulièrement utiles, selon les conditions de fonctionnement, telles que le vide (pompes
turbomoculaires), les températures élevées ou basses (turbo-expandeurs), les unités hermétiques
(paliers fonctionnant dans le gaz de procédé).
Dans le domaine des turbomachines industrielles, ils ne peuvent pas être installés économiquement
dans des lignes d’arbres comportant un réducteur ou un multiplicateur de vitesse, parce qu’un système
d’huile est déjà exigé (pour les lignes de compression entraînées par moteur électrique, ceci signifie
que les paliers magnétiques actifs ne peuvent être installés que si le moteur est à grande vitesse
variable). Néanmoins, c’est une technique qui est destinée à se développer et qui a prouvé son
efficacité par de nombreuses applications.
03026_A_F © 2005 ENSPM Formation Industrie - IFP Training
6
Bearing
Stator Electro-magnet
Electro-maget
Set point
Controler Amplifier
Position signal Position
probe
Position
probe
Stator Electro-magets Stator
Rotor
Rotor Axial probe
D T 1768 A
Activ magnet bearing
Layout landing bearing
Paliers magnétiques actifs
D T 1769 A
Compresseur centrifuge libre d’huile
03026_A_F © 2005 ENSPM Formation Industrie - IFP Training
7
b - Butées
Les rotors doivent résister aux forces axiales élevées dues à :
- la distribution de pression sur les aubes (rapport de pression sur le diamètre de l’ouïe de
roue pour les compresseurs centrifuges, degré de réaction sur les disques des turbines à
vapeur axiales)
- la réaction axiale due aux forces aérodynamiques sur les aubes
- la poussée des étanchéités internes et du piston
- la réaction des accouplements due à la dilatation thermique différentielle entre les rotors
Les techniques utilisées pour les butées, sont les mêmes que celles des paliers radiaux :
- hydrodynamiques à huile (butées lisses, butées à patins oscillants)
- magnétiques actives
Une remarque doit être faite au sujet de l’arrangement particulier de certaines lignes d’arbres. Il est
possible d’éliminer la butée d’un corps, en utilisant un accouplement dit “torsible”, qui transmettra la
poussée au corps suivant. C’est aussi une manière de diminuer les pertes mécaniques de palier.
3- ACCOUPLEMENTS
L’accouplement rigide est l’arrangement le plus simple. Le boulonnage ajusté assure la position
relative des arbres. Le couple est transmis par le frottement des brides. Ce type d’accouplement
permet aussi de diminuer le nombre de paliers radiaux dans une ligne d’arbres, (par exemple 3 paliers
radiaux au lieu de 4 pour une ligne de 2 rotors, avec un palier radial intermédiaire commun, ou dans le
cas de grands turboalternateurs). Dans ce cas, les rotors sont naturellement fortement couplés, et
l’analyse de dynamique de rotor doit prendre en compte la présence de cet accouplement.
Les accouplements à denture ne sont pratiquement plus utilisés, en raison de leur besoin en huile
finement filtrée, et des poussées axiales qu’ils génèrent. Les accouplements flexibles, utilisant des
éléments métalliques déformables (des membranes ou des diaphragmes) sont très courants en
turbomachine, car ils découplent totalement les rotors.
Les accouplements “torsibles”, cités dans le paragraphe précédent, ont une flexibilité radiale élevée
afin de découpler le comportement vibratoire de chaque rotor, et une grande raideur axiale pour la
transmission de la poussée.
4- LIGNES D'ARBRES
Ce chapitre rappelle qu’une turbomachine ne fonctionne pas seule. Une ligne d’arbres, se compose
de :
- turbomachines menantes (turbines de gaz, turbines à vapeur, détendeurs de gaz)
- turbomachines menées (compresseurs centrifuges ou axiaux, ventilateurs, soufflantes)
- moteurs électriques (à vitesse de rotation fixe ou variable), ou alternateurs
- réducteurs ou multiplicateurs destinés à adapter les vitesses de rotation entre les machines
de la ligne
- variateurs hydrauliques de vitesse
- accouplements entre chaque corps
03026_A_F © 2005 ENSPM Formation Industrie - IFP Training
8
II - DYNAMIQUE DE ROTOR
1- VIBRATIONS
Chaque structure mécanique vibre si elle est soumise à toute excitation dynamique (non constant
contre le temps). Dans une analyse (vibratoire) dynamique, les éléments principaux à considérer sont :
- les fréquences propres (les fréquences pour lesquelles la structure répond avec l’amplitude
maximale sous une excitation harmonique - ou sinusoïdale)
- la forme modale (déformation vibratoire de la structure excitée sur chaque fréquence
propre)
- l’amortissement, qui est l’une capacité de la structure de limiter l’amplitude vibratoire de la
forme modale quand cette structure est excitée sur une fréquence propre (état de
résonance)
La dynamique de rotor est une branche spécifique d’analyse vibratoire. Cette science consiste en
l’analyse :
- des vibrations de flexion (ou vibrations latérales)
- des vibrations de torsion
Les caractéristiques principales qui doivent être prises en compte dans la dynamique de rotor sont :
- la raideur et la distribution de masse (et inertie) de l’arbre
- les caractéristiques de masse et d’inertie transverse des disques et des roues (si elles sont
considérées comme non flexibles)
- les effets gyroscopiques, dus à la vitesse de rotation et à l’inertie polaire
- les conditions aux limites (raccordements entre le rotor et le stator), que l’on appelle aussi
“interactions fluide-structure”
- les sources potentielles d’excitation (balourds, excitations aérodynamiques, forces de
décrochage tournant, défaut d’alignement, etc.)
Les interactions fluide-structure concernent :
- les paliers radiaux
- les étanchéités de bout d’arbre
- les étanchéités internes (étanchéités inter-étages, piston d’équilibrage axial, …)
- les roues, ou disques tournant dans le gaz
et sont modélisées en tant que matrices complètes de raideur et d’amortissement (y compris les
termes directs, et les termes croisés).
03026_A_F © 2005 ENSPM Formation Industrie - IFP Training
9
2- MÉTHODES DE CALCUL DE FRÉQUENCES PROPRES
Deux types de modèles numériques sont utilisés :
- des méthodes de matrices de transfert, économiques et temps CPU, mais limitées à des
arbres droits (sans branchements)
- des méthodes matricielles, issues des méthodes aux éléments fins, plus complexes, mais
plus générales, et plus modernes
Ces méthodes sont rapidement décrites ci-dessous. L’introduction des termes d’amortissement n’est
pas considérée ici, mais leur prise en compte est absolument nécessaire pour l’analyse de dynamique
de rotor pour l’évaluation de la stabilité, et pour le calcul des réponses aux excitations. Une méthode
simple, basée sur la théorie de Rayleigh-Ritz est également présentée, parce qu’elle utilise des calculs
simples, possibles à la main sans nécessité de disposer d’un ordinateur.
Les expressions mathématiques de ces méthodes sont basées sur des principes différents :
- équations d’équilibre dynamique :
dω
∑F = M γ ou ∑C = l
dt
associées à la formule mécanique de résistance (loi de Hooke). Pour les effets
gyroscopiques, il est nécessaire de considérer une force exprimée en fonction de
l’accélération de Coriolis:
γ c = – 2 Ωe ∧ Vr
- équations de Lagrange, qui prennent rigoureusement en compte les effets gyroscopiques,
et qui sont exposées ci-après.
a - Méthode des équation de Lagrange
Notations:
M It I p masses et inerties polaire et transverse des éléments
v w déplacements latéraux
θψ pentes de la déformée
Ω vitesse de rotation
° symbole de dérivation par rapport au temps
Une vibration est toujours un échange dynamique entre les énergies cinétique et de déformation de la
structure. L’expression de l’énergie cinétique pendant la vibration est :
1 1 1
T = M (v °2 + w°2 ) + l (θ°2 + ψ°2 ) + l (Ω2 + 2 Ω ψ° θ) (1)
2 2 t 2 t
translation rotation effets gyroscopiques
L’expression de l’énergie de déformation est :
E I L ∂ v ∂ w ∂v2 ∂w2
2 2 2 2 Fa L
U = ∫
2 0 ∂y + dy + ∫0 ∂y + ∂y dy (2)
2 ∂y
2 2
où y est la coordonnée axiale du rotor, et F a une éventuelle force axiale.
03026_A_F © 2005 ENSPM Formation Industrie - IFP Training
10
Ces formules sont exprimées pour des paramètres tels que des forces virtuelles, notées “q”, et les
dérivations de ces expressions pour chaque paramètre q conduit aux équations de Lagrange par :
d ∂T ∂T ∂U
dt ° – ∂q + ∂q = 0 (3)
∂qi i i
Ceci permet d’obtenir l’expression de type élément fini correspondant à un élément de poutre du rotor.
On peut également utiliser ceci pour réaliser des calculs manuels à l’aide de la méthode de Rayleigh
Ritz.
Si une force est appliquée, par exemple un balourd, l’équation de Lagrange est :
d ∂T ∂T ∂U
dt ° – ∂q + ∂q = F(t) qi (4)
∂qi i i
b - Méthode des matrices de transfert
– Le rotor est divisé en une série des masses mortes reliées entre elles par des tronçons de raideur
pure.
D T 2520 A
– On choisit un vecteur de grandeurs caractéristiques propres au problème à traiter :
pour chaque déplacement pour chaque
angle point de pente direction de
couple l’analyse effort tranchant l’analyse
en torsion moment de flexion en flexion
– On écrit pour chaque élément la matrice de transfert qui relie le vecteur des caractéristiques à
gauche, au vecteur des caractéristiques à droite. Par exemple, dans l’analyse de torsion, les
matrices de transfert sont de la forme :
angle 0 1 angle
= pour l’inertie (5)
couple droite 1 lp Ω2 couple gauche
et
angle 0 1/K angle
= pour l’inertie (6)
couple droite 1 1 couple gauche
Dans le cas de la flexion, la taille des matrices est 8 * 8, et d’autres matrices sont nécessaires pour
les conditions limite (paliers, interactions fluide-structure).
– Puis, on obtient la matrice de transfert du rotor complet en multipliant toutes les matrices
élémentaires entre elles :
angle angle
= π M (ω 2 ) (7)
couple extrémité droite couple extrémité gauche
03026_A_F © 2005 ENSPM Formation Industrie - IFP Training
11
– Il y a fréquence propre ω i s’ il y a une oscillation libre (couples nuls aux deux extrémités de
l’arbre) :
angle angle
= π M (ω i2 ) (8)
0 extrémité droite 0 extrémité gauche
ce qui s’écrit :
angle extrémité droite 0
N (ω i2 ) = (9)
angle extrémité gauche 0
– On obtient les fréquences propres en résolvant l’équation :
déterminant de N (ωi2 ) = 0 (10)
Les formes modales sont alors obtenues à partir des équations (5) et (6) pour chaque fréquence
propre.
c - Méthode aux éléments finis
– On divise le rotor est en une série de masses mortes reliées par des tronçons de raideur pure.
D T 2520 A
– On choisit les degrés de liberté correspondant au problème à traiter :
• torsion : 1 degré de liberté par nœud { angle }
déplacement v
• flexion plane : 2 degrés de liberté par nœud
pente θ
déplacement
pente θ
v
• flexion généralisée : 4 degrés de liberté par nœud déplacement w
pente ψ
03026_A_F © 2005 ENSPM Formation Industrie - IFP Training
12
– Les matrices de masse et de raideur sont déduites des équations de Lagrange (flexion) qui incluent
directement les effets gyroscopiques, ou de l’équation générale d’équilibre dynamique. La matrice
de masse est diagonale et la matrice de raideur est une matrice bande :
torsion : flexion :
M1 0 0 0 0
0 I t1 0 0
I p1 0 0 0 0 M1
0 I p2 0 0 I t1
M = M =
M2
0 0 I pn I t2
0 0 I tn
k1 - k1 0 0 0 0
-k1 k1 + k2 - k2 0 K ii K ij
K = 0 -k2 k2 + k3 K = K ji K jj
0 - kn
D T 2521 A
0 0 -kn kn 0
Dans l’analyse de torsion, la matrice de raideur est symétrique, mais ce n’est pas le cas pour
l’analyse de flexion en raison du couplage des directions au niveau des termes croisés des paliers,
des étanchéités et des roues. Ceci conduit à des valeurs propres complexes (au sens
mathématique du terme).
– Dans l’analyse de flexion, la matrice d’amortissement contient aussi les amortissements locaux des
paliers et les effets gyroscopiques ; elle est également non symétrique.
– Les fréquences propres sont solution de l’équation matricielle d’équilibre dynamique :
[M] {X}°° + [K] {X} = {0} (11)
et sont calculées par les mêmes méthodes d’itération que celles utilisées dans les analyses
modales des éléments finis.
Dans le cas de l’analyse de flexion, les valeurs propres sont complexes, en raison de la non
symétrie de la matrice de raideur, et de la matrice d’amortissement. La partie imaginaire de la
valeur propre est la pulsation propre, et la partie réelle est l’amortissement modal.
– Les formes modales sont calculées en même temps que les fréquences propres, il s’agit des
vecteurs propres.
03026_A_F © 2005 ENSPM Formation Industrie - IFP Training
13
d - Méthode de Rayleigh Ritz
Quand le problème est de petite taille (en particulier lorsqu’on souhaite faire des calculs simplifiés à la
main, lorsqu’on ne dispose pas de méthode automatique), la méthode de Rayleigh Ritz est assez
simple d’emploi.
Cette méthode consiste à supposer une déformée approximative chaque mode. Une solution très
facile consiste à considérer des ondes sinusoïdales correspondant au nombre souhaité de nœuds de
vibration. Une amélioration utilise les déformées statiques avec une force dans l’entraxe des paliers
pour le 1 er mode propre, ou un moment de flexion transverse pour le 2ème mode propre. Pour le
premier mode de flexion, il est possible considérer la déformée au poids, ce qui est un peu plus précis,
mais également plus compliqué.
Les équations de Lagrange peuvent être utilisées en variante, afin de tenir compte des effets
gyroscopiques. Dans ce cas, la force, le moment de flexion, le poids peuvent être les paramètres
dérivés des équations de Lagrange.
3- VIBRATIONS DE FLEXION
Quand on a des accouplements flexibles, chaque rotor peut être calculé indépendamment. Autrement,
il faut analyser la ligne complète.
Les méthodes précédemment décrites, permettent le calcul des fréquences propres et des formes
modales. Maintenant, ces résultats doivent être compris et interprétés.
a - Fréquences propres - Formes modales - Résonances - Vitesses critiques
Les formes modales sont montrées sur le diagramme de Campbell, voir schéma ci-dessous.
Fréquences Vitesse nominale
4 ème
2 ème
freq.
propre
Point de 3 ème
fonctionnement
2 ème
1 er
1 er
freq.
propre
α = 0,123 α = 0,089
D T 1770 B
Formes modales
13800 rpm Vitesse de rotation
Diagramme de Campbell d’un compresseur centrifuge
03026_A_F © 2005 ENSPM Formation Industrie - IFP Training
14
Les fréquences propres sont classées en fonction de leur forme modale. Puisque le rotor peut être
assimilé à une poutre, la classification tient compte du nombre de nœuds le long du rotor (un nœud est
un point qui ne se déplace pas pendant la vibration).
Tout d’abord, on trouve les modes de corps rigide (ou modes de suspension). Ces modes s’appellent
également modes de palier, parce que l’arbre n’est pratiquement pas fléchi car étant plus raide que les
paliers. Ces modes sont celui de translation (ou mode cylindrique), avec 0 nœud, et le mode de
basculement (ou conique), avec 1 nœud.
Après les modes de corps rigide (ou solide), on trouve les modes (élastiques) de flexion. L’arbre est
clairement fléchi, et il y a des nœuds dans la longueur de la structure. Ils sont classés en fonction de
leur nombre de nœuds :
- 1er de flexion avec 1 nœud
- 2ème de flexion avec 2 nœuds
- etc.
Ensuite, il y a l’influence des effets gyroscopiques dus à la rotation. Si le rotor est à l’arrêt, les formes
modales se développent dans un plan ; si le rotor tourne, les effets gyroscopiques couplent les deux
directions (horizontale et verticale), et les trajectoires du rotor sont des ellipses centrées sur l’axe du
rotor.
En outre, dans un système d’arrêt, les valeurs propres sont doubles (deux valeurs propres identiques
avec la même forme modale), mais dans un système tournant, ces valeurs propres sont différentes,
avec la première forme modale tournant dans la même direction que le rotor (précession positive ou
directe) et le second tournant dans l’autre direction (précession négative ou inverse ou rétrograde).
Les rotors ayant des disques en porte-à-faux sont plus sensibles aux effets gyroscopiques.
Enfin, les caractéristiques de palier influent sur la forme modale. Pour les paliers isotropes (de mêmes
caractéristiques dans toutes les directions), les formes modales sont des trajectoires circulaires ;
autrement, elles sont elliptiques. Dans le cas des paliers très chargés, comme dans les turbines à
vapeur, il est possible de trouver un mode pratiquement vertical (le palier est plus raide dans cette
direction), et un mode pratiquement horizontal (à une plus basse fréquence, parce que le palier est
plus souple dans cette direction), avec des trajectoires très plates ; il est alors assez difficile de
déterminer exactement la précession.
Une résonance est la coïncidence d’une fréquence propre et une fréquence d’excitation, entraînant
des amplitudes de vibration élevées. Pour un rotor, une vitesse critique est la coïncidence d’une
fréquence propre de flexion d’un mode de précession positive, avec la vitesse de rotation. C’est la
fréquence pour laquelle la réponse vibratoire (amplitude) à un balourd est maximale. L’amplification à
la résonance est le rapport de l’amplitude sur la vitesse critique, à l’amplitude de la réponse à la même
excitation mais appliquée à très basse fréquence.
On trace généralement les résultats sur des diagrammes de Campbell, pour une interprétation visuelle
des résultats. L’abscisse est la vitesse de rotation (pour tenir compte de la plage de vitesse), et
l’ordonnée est l’échelle des fréquences - les fréquences propres (qui varient lentement avec la
vitesse), et les fréquences d’excitation (qui sont des harmoniques, ou des sous-harmoniques de la
vitesse de rotation). Quand deux lignes se croisent, il y a une résonance.
b - Amortissement
La position des vitesses critiques vis à vis de la plage de vitesse de fonctionnement est une chose
importante lors de la conception d’une machine tournante.
Néanmoins, cette notion est loin d’être suffisante dans le domaine des turbomachines à grande vitesse
et à haute pression. D’autres caractéristiques, plus difficiles à mettre en évidence, sont plus
importantes. L’amortissement venant des effets gyroscopiques, des paliers, et parfois des étanchéités,
est fondamental dans la conception d’une machine.
03026_A_F © 2005 ENSPM Formation Industrie - IFP Training
15
Les turbomachines de procédé ont généralement un fonctionnement supercritique (vitesse de rotation
au-dessus de la première vitesse critique), et la manifestation la plus connue de l’amortissement est la
limitation de l’amplitude de vibration lors du franchissement de cette vitesse critique. L’autre aspect
dans le domaine des compresseurs centrifuges à très haute pression, est la stabilité vibratoire, qui
rend le fonctionnement exempt de toute composante vibratoire subsynchrone.
Vibration synchrone Vibration subsynchrone
Amplitude (µm c-c) Amplitude (µm c-c )
20 20
First natural frequency
Rotation Rotation
10 10
D T 1771 B
0 0
0 100 200 300 400 0 100 200 300 400
Fréquence (Hz) Fréquence (Hz)
Spectre avec instabilité vibratoire subsynchrone
Ces deux aspects sont présentés dans les paragraphes suivants.
c - Réponse aux balourds
Les turbomachines industrielles sont souvent conçues conformément aux recommandations API
(American Petroleum Institute). Dans le domaine des compresseurs centrifuges, un groupe de travail
ISO (International Standard Organisation) prépare une norme internationale (actuellement ISO/DIS
10439.2), dont la rédaction suit de très de près la 6ème édition de l’API 617 (février 1995). Le texte lié
à la dynamique de rotor de l’API 617 pour les compresseurs centrifuges est en annexe.
Ces normes se rapportent au comportement des rotors balourdés. L’avantage de cette analyse est
qu’un balourd est très facile à caractériser, et à installer sur un rotor pour une vérification
expérimentale (API 617 –1995).
La notion d’amortissement fait maintenant partie intégrante de ces normes :
- si l’amplification à la résonance de la réponse au balourd est inférieure à 2,5, la fréquence
propre n’est pas considérée comme “vitesse critique”, et un mode propre ainsi “critiquement
amorti” peut se situer dans la plage de vitesse de fonctionnement (API 617 -1995)
- les marges de séparation, distances entre les vitesses critiques et les limites de la plage de
vitesse de fonctionnement, sont fonction de l’amortissement propre de ces vitesses critiques
(plus l’amortissement est bas, plus la marge de séparation doit être grande) (API 617 de
1995)
03026_A_F © 2005 ENSPM Formation Industrie - IFP Training
16
La figure ci-dessous montre la réponse à un balourd sur un rotor de compresseur centrifuge.
Amplitude de vibration
Balourd
Centre du rotor Paliers
F x = m.a sin ( ω t + φ)
F z = m.a cos ( ω t + φ)
D T 1772 B
Plage de vitesse
Vitesse de rotation
Réponse au balourd
d - Phénomènes à prendre en compte pour les analyses de stabilité
L’amortissement est l’un des principaux phénomènes capables de limiter les amplitudes de vibration.
Ceci est évidemment vrai pour la réponse à des excitations forcées à une fréquence donnée. Ca l’est
aussi pour compenser les effets déstabilisants (raideur croisée) développés par les éléments tournant
dans les gaz lourds dans la machine. Si la capacité d’amortissement n’est pas assez élevée, les effets
des raideurs croisées déstabilisent la vibration, avec une amplitude qui n’est plus limitée que par les
contacts entre le rotor et le stator, ce qui peut mener jusqu’à la destruction de la machine.
Ceci est l’un des problèmes les plus sérieux des compresseurs centrifuges à haute pression. Ces
machines comportent en particulier :
- des paliers hydrodynamiques (ou magnétiques) pour la sustentation du rotor
- des étanchéités de bouts d’arbre (étanchéités sèches à gaz ou étanchéités mécaniques
lubrifiées, ou étanchéités à film d’huile pour les compresseurs à haute pression) pour
confiner le gaz
- des étanchéités internes (labyrinthe à dents, brosses ou nid d’abeilles) pour limiter les
recirculations aux ouïes de roue et au piston d’équilibrage
- des roues
• Paliers
Les paliers génèrent la raideur et l’amortissement nécessaires. Ces valeurs dépendent :
- de la vitesse de rotation
- des conditions de fonctionnement (échanges thermiques, qui causent les dilatations
thermiques des patins, de l’arbre et de la cage de palier, et par conséquent les variations de
jeu et de précharge géométrique en service – efforts radiaux produits par l’injection partielle
dans les turbines à vapeur)
- de la nature et de la température de l’huile (viscosité)
- de la fréquence d’excitation (par rapport à la vitesse de rotation)
03026_A_F © 2005 ENSPM Formation Industrie - IFP Training
17
• Étanchéités de bouts d’arbre
Les étanchéités mécaniques de bouts d’arbre (garnitures sèches ou lubrifiées) se comportent comme
des masses mortes, parce que l’interface est radiale, et que les forces générées sont seulement dues
au cisaillement du film d’étanchéité.
Les étanchéités à bagues flottantes fonctionnent avec des interfaces (films d’huile) le long de l’arbre.
Elles sont utilisées dans les compresseurs à haute pression (en général plus de 300 bar de pression
de refoulement). Les bagues sont dites “flottantes” ; ceci n’est vrai que pendant le démarrage du
compresseur où la bague suit l’arbre depuis le fond des paliers jusqu’à la position centrée, mais plus
du tout pendant la marche pressurisée, parce que la chute de pression dans la bague (jusqu’à
100 bar) est suffisante pour la bloquer totalement.
Les bagues flottantes doivent être considérées comme des paliers hydrodynamiques supplémentaires
pour le rotor. Un bague flottante mince avec une interface cylindrique produit uniquement de la raideur
croisée, nuisible à la stabilité.
• Influence de la raideur croisée sur la stabilité
La schéma ci-dessous explique l’effet de déstabilisation d’une raideur croisée. Supposons qu’une
perturbation soudaine se produise. Le rotor ainsi excité répond naturellement sur chaque mode propre
de vibration, et la figure considère un mode à précession positive. Les réactions des paliers, des
étanchéités, etc. sont représentées.
La raideur directe s’opposant aux effets d’inertie maintient la trajectoire sur l’ellipse. La force
d’amortissement est de sens opposé au mouvement, ce qui tend à ralentir ce mouvement, c’est-à-dire
à diminuer la taille de la trajectoire (stabilité). La force de raideur croisée est dans le même sens que le
mouvement, et tend à augmenter la taille de l’orbite (instabilité).
k xz
Orbitale % Ma %
K C%
D T 2512 A
Rotation
Effet de la raideur croisée sur la stabilité
Afin d’éviter cet effet, différents moyens sont utilisés pour diminuer la capacité de déstabilisation des
bagues à film d’huile, afin de produire de la raideur directe (pour réduire l’excentricité en
fonctionnement), et de l’amortissement direct (pour compenser la raideur croisée). Ainsi, des interfaces
sophistiquées (avec des rainures, des étagements de diamètres, des cônes) sont utilisées ; parfois, on
peut aller jusqu’à introduire des éléments additionnels tels que des lobes ou même des patins
oscillants.
03026_A_F © 2005 ENSPM Formation Industrie - IFP Training
18
• Étanchéités internes
Les étanchéités internes ont été fortement étudiées dans le domaine des pompes, parce qu’elles
étaient la cause des instabilités des turbopompes de la navette spatiale américaine et des moteurs de
fusée fonctionnant en conditions extrêmes. La connaissance actuelle dans le domaine des
compresseurs centrifuges est une conséquence de ces études, mais avec deux d’autres difficultés : la
compressibilité du fluide et les écoulements soniques qui créent des non-linéarités.
Les étanchéités internes développent de la raideur croisée. Celle-ci est d’autant plus élevée que le gaz
est plus lourd (la masse volumique comprend le produit de la masse molaire par la pression).
L’élément prépondérant est l’étanchéité du piston d’équilibrage. Les raideurs croisées des ouïes de
roue sont d’un ordre de grandeur plus faible que les labyrinthes à dents des pistons, mais elles sont
plus nombreuses. L’influence des labyrinthes d’arbre (en sortie des canaux de retour) est pratiquement
négligeable.
Un paramètre très important pour la raideur croisée d’un labyrinthe, est la prégiration du gaz à l’entrée
de l’étanchéité (rapport de la vitesse de giration du gaz à la vitesse périphérique de l’arbre) – voir
figure ci-dessous. L’effet sur la dynamique de rotor est défini par le rapport kxy/Cω (“whirl frequency
ratio” en anglais). Si ce rapport est supérieur à 1, l’élément considéré comme déstabilisant. Différents
dispositifs sont donc utilisés pour limiter cette prégiration d’entrée (dispositifs anti-tourbillon, injection
de gaz à giration imposée par des “shunts holes”).
Raideur (N/m) Amortissement (N.s/m)
10 8 10 5
Nid d'abeilles
kX
5 10 7
5 10 4
K
kX Labyrinthe à dents
0
K 100 % 0
0%
D T 2513 A
0% 100 %
Prégiration Prégiration
Caractéristiques dynamiques des étanchéités internes
Quand on a des risques d’instabilité, l’utilisation des étanchéités à nid d’abeilles est efficace, parce
qu’elles développent des amortissements directs élevés. Une telle étanchéité est plus efficace à haute
pression (plus de 100 bar), et son effet est également bénéfique à la dynamique de rotor en remontant
la première fréquence propre du rotor grâce à l’effet de raideur directe.
03026_A_F © 2005 ENSPM Formation Industrie - IFP Training
19
• Autres interactions fluide-structure
Il est plus difficile modéliser les autres “interactions fluide-structure” (roues, volutes, …). Pour les
roues, où les distributions d’écoulement sont très complexes, on utilise la formule de Wachel, dérivée
des travaux d’Alford dans le domaine des compresseurs axiaux :
MW P ρd
k xy = 0,016 (12)
D w Fr ρs
où P est la puissance gaz développée par l’étage
MW la masse molaire
D le diamètre extérieur de la roue
w la largeur du passage gaz
Fr la fréquence de rotation
ρd /ρs représente le rapport de pression de la roue
D’autres travaux, basés sur des calculs instationnaires Navier Stokes sont en cours (mais ne sont pas
encore validés). De tels calculs sont encore trop longs et trop complexes pour être envisagés lors de la
conception d’une turbomachine industrielle.
e - Quelques éléments sur les analyses de stabilité
Le projet de norme ISO/DIS 10439.2 demande de réaliser une analyse de stabilité quand la masse
volumique du gaz est supérieure à 60 kg/m 3 mais n’indique pas la méthode à employer. Nous
voudrions apporter ici quelques éléments.
• Positionnement des vitesses critiques
L’API 617 recommande de positionner les vitesses critiques par rapport à la plage de vitesse de
fonctionnement, essentiellement pour des raisons de réponse au balourd. Il y a d’autres critères
reprenant cette notion qui sont liés à la stabilité vibratoire du rotor.
Les diagrammes de Fulton et de Kirk Donald utilisent le rapport de la vitesse maximale continue à la
1ère vitesse critique calculée sur des paliers rigides (infiniment raides). Le diagramme de Fulton
considère la masse volumique moyenne du gaz dans le compresseur, (c’est-à-dire le type de service
du compresseur - masse molaire et niveau de pression). Le diagramme de Kirk Donald considère le
produit P.∆P (la différence de pression représentant le nombre d’étages de compression).
Vitesse maxi cont. / 1ère critique (palles raides) Vitesse maxi cont. / 1ère critique (palles raides)
3,5 3,5 Zone instable
3 Zone instable 3
2,5 2,5
2 2 Zone stable
1,5 1,5
Zone stable
1 1
D T 1773 B
10 100 1000 100 1000 10000 100000
Masse volumique moyenne (kg/m3) - Log Pref (Pref– Pasp) (bar) - Log
Diagramme de Fulton Diagramme de Kirk Donald
03026_A_F © 2005 ENSPM Formation Industrie - IFP Training
20
Ces critères ne peuvent pas être considérés comme étant absolument rigoureux, parce qu’ils ne
considèrent ni la flexibilité de l’arbre, ni l’arrangement des paliers et des étanchéités, ni aucune
caractéristique intrinsèque d’amortissement. Néanmoins, ils sont très précieux en tant qu’indicateurs
pratiques sur la faisabilité d’un compresseur.
Chaque constructeur de compresseurs doit déterminer ses propres limites dans ces diagrammes
simples, et développer d’autres critères d’après son expérience.
• Dimensionnement des paliers
Les paliers hydrodynamiques à patins oscillants sont des éléments très importants pour la stabilité. Ils
ont une capacité élevée d’amortissement et ils ne développent pas de raideur croisée. Trois
paramètres sont choisis : le jeu, la précharge géométrique et le décalage de pivot.
Un jeu minimal fonction de la vitesse de rotation est nécessaire pour ne pas avoir de trop haute
température de l’antifriction, et pour permettre les transitoires thermiques (dilatation différentielle des
patins, de l’arbre et de la cage) pendant la montée en vitesse. La précharge géométrique ne doit pas
être trop basse, parce que les tolérances de fabrication peuvent la rendre négative, ce qui conduirait à
une déstabilisation des patins eux-mêmes.
Néanmoins, le choix de bonnes caractéristiques jeu-précharge est un moyen très efficace pour
maximiser l’amortissement des premiers modes. Il faut préciser que le choix d’un autre arrangement
de palier ne va pas forcément diminuer les niveaux de vibration mesurés aux capteurs de vibration (et
parfois même légèrement les augmenter à vitesse nominale), parce que l’amortissement travaille s’il y
a des déplacements aux paliers, mais toutes les composantes subsynchrones du spectre sont
atténuées, et les traversées de vitesses critiques sont facilitées.
Si un rotor n’est pas assez amorti, le moyen le plus efficace consiste à diminuer la précharge
géométrique des patins. Augmenter le jeu et le décalage de pivot (afin de récupérer la raideur perdue
par l’augmentation de jeu) est aussi un moyen efficace.
Quelques mots relatifs à d’autres dispositifs spéciaux tels que les “squeeze films”, qui sont parfois
utilisés en même temps que les paliers hydrodynamiques. Ces dispositifs sont utilisés dans les
moteurs aéronautiques parce que les roulements à billes n’ont aucune capacité d’amortissement. Leur
calcul n’est pas facile, parce que le fonctionnement est non linéaire, mais leur mise en œuvre est plutôt
aisée.
03026_A_F © 2005 ENSPM Formation Industrie - IFP Training
21
• Évaluation de la stabilité
Les publications des années 1993 à 1997 indiquent que la façon d’évaluer la stabilité consiste à
étudier l’évolution du décrément logarithmique du premier mode en fonction d’une raideur croisée
placée au centre du rotor. Le seuil de stabilité s’obtient pour l’amortissement nul, et la valeur de la
raideur croisée correspondante est comparée à celle développée par les roues.
Amortissement du 1er mode
Raideur croisée des roues
Instabilité
D T 2514 A
Raideur croisée au centre
Seuil de stabilité
La marge de stabilité est sur le rapport de ces deux valeurs. THERMODYN a élaboré son propre
critère pour connaître quelle marge de stabilité doit être installée sur un compresseur, en fonction de
son service et de sa conception. Ce critère est également utilisé pour décider de la nécessité d’installer
de l’amortissement supplémentaire, comme par exemple par les nids d’abeilles, et pour juger de
l’efficacité de tels dispositifs.
03026_A_F © 2005 ENSPM Formation Industrie - IFP Training
22
4- ÉQUILIBRAGE DYNAMIQUE
L’équilibrage dynamique des rotors fait partie intégrante des contrôles normaux de fabrication avant le
montage et les essais d’une machine tournante. Le but est d’obtenir une distribution de balourd
résiduel compatible avec un fonctionnement sain de la machine, caractérisé par un niveau bas
vibratoire lors du fonctionnement et du franchissement les vitesses critiques. Les amplitudes de
vibration dans la machine doivent également être compatibles avec les jeux internes (étanchéités,
labyrinthes, etc.).
Les sources de balourd sont multiples. Naturellement, il y a les flexions de rotor, les non-homogénéités
métallurgiques, les défauts d’usinage (roues ou garnitures d’étanchéité) conduisant à des centres de
gravité non situés sur la ligne de rotation, des jeux aléatoires dans le montage sur l’arbre (montage par
joints O’rings), l’érosion ou la corrosion, les déformations en service (dilatations). Mais on va
s’intéresser au montage normal du rotor.
Considérons une roue de 50 kg parfaitement équilibrée, assemblée sur un rotor (10000 tr/min) qui a
une excentricité de seulement 5 microns de la portée de cette roue par rapport à la ligne des centres
des paliers (valeur inférieure à la tolérance de fabrication, et très difficile à mesurer). Le balourd
généré est 250 g/mm, soit 8 fois le balourd admissible API pour ce seul élément ! Cet exemple justifie
le soin apporté à l’équilibrage des rotors.
Un autre élément est que la tolérance d’équilibrage, recommandée par l’API, correspond à une classe
d’équilibrage de G 0,65, qui est très proche de la classe des gyroscopes (G 0,4), et plus rigoureux que
la classe G 2,5 exigée pour des turbocompresseurs par l’ISO 1940.
Nous formulerons une critique sur les recommandations API. Le balourd admissible est défini pour la
vitesse maximale continue. Or, cette classe n’est valable que pour un rotor rigide jusqu’à cette vitesse
de rotation (première critique au-dessus de la maxi continue). C’est également la raison pour laquelle
les critères d’acceptation de l’équilibrage à vitesse nominale ne sont pas indiqués.
Il n’est pas possible de connaître la distribution réelle du balourd sur un rotor. Par conséquent, on ne
peut faire qu’une correction globale, pour les conditions de fonctionnement spécifiées. Les techniques
d’équilibrage consistent à installer une distribution correctrice de balourd qui, en même temps que la
distribution initiale inconnue de balourd, assurera un fonctionnement sain jusqu’aux vitesses de
rotation spécifiées.
a - Différents types d’équilibrage dynamique
Les rotors sont équipés de plans d’équilibrage dans lesquels les balourds correcteurs sont implantés
par l’adjonction de masses contrôlées (vis de masse ajustable sur un diamètre fixé) à une position
angulaire précise.
Si le fonctionnement est situé au-dessus du nème mode propre, le rotor doit être équipé de n+2 plans
d’équilibrage ; le chiffre 2 représente les deux modes de corps rigide.
La méthode la plus souvent utilisée est celle des coefficients d’influence.
Les rotors sont d’abord équilibrés à basse vitesse en deux plans (vitesse d’équilibrage au-dessous de
la vitesse critique). L’avantage de la procédure API, (rotor assemblé élément par élément - 2 maximum
- avec des plans d’équilibrage correspondant à chaque étape à ceux des éléments montés) est que le
balourd résiduel dit “3 masses” qui ne peut pas être détecté sur une équilibreuse basse vitesse est
minimisé.
Les équilibreuses à basse vitesse sont généralement du type à paliers flexibles. Le système
d’acquisition et de traitement calcule directement les balourds correcteurs à installer par la méthode
des coefficients d’influence (dans ce cas, on calcule les coefficients d’influence à partir de la
géométrie, indépendamment de la vitesse de rotation).
03026_A_F © 2005 ENSPM Formation Industrie - IFP Training
23
Pour les rotors à grande vitesse, il peut être nécessaire d’effectuer un équilibrage à vitesse nominale,
parce que la sensibilité des équilibreuses à basse vitesse devient insuffisante. Cet équilibrage est
réalisé dans une installation spéciale sous vide, afin de limiter la puissance d’entraînement et la
température du rotor. Les acquisitions sont effectuées pour différentes vitesses de rotation, en
particulier la vitesse nominale, les extrêmes de la plage de vitesse, près des vitesses critiques, et au-
dessous de la première critique (pour conserver les caractéristiques de l’équilibrage à basse vitesse).
Le procédé consiste à :
- caractériser le rotor par un lancer dans son état initial
- déterminer pour chaque palier les coefficients d’influence relatifs à chaque plan de
correction (avec un balourd test placé successivement dans tous les plans), par la
différence de réponse du rotor (opération appelée “tarage” des plans)
- calculer les balourds correcteurs, par exemple avec de méthode de moindres carrés
appliquée sur toutes les vitesses de rotation
- installer les masses de correction dans les plans et vérifier les résultats
- réitérer si besoin (parce que la réalité n’est pas linéaire)
Équilibrer in situ est également faisable, avec le rotor en place dans la machine. La méthode des
coefficients d’influence est également utilisée. Dans ce cas, tous les plans de correction ne sont pas
accessibles, et le résultat ne peut pas être considéré comme théoriquement parfait. Néanmoins, c’est
un procédé très utile, en particulier pour la correction d’un accouplement qui ne serait monté en final
que sur sit, et qu’il est tout à fait normal d’équilibrer seulement au montage, indépendamment de la
qualité d’équilibrage intrinsèque de cet accouplement.
b - Méthode des coefficients d’influence
Le rotor est supporté sur deux paliers, les vecteurs de vibration de ces paliers sont notés et
X1 et X2 (amplitudes A1 et A2 - phases ϕ 1 et ϕ 2 par rapport à la référence angulaire du rotor
après filtration du signal à la vitesse de rotation). Avec le balourd test Bt 1 placé dans le 1er plan
d’équilibrage (amplitude m.a1 et phase ψ 1) , on obtient de nouveaux vecteurs vibration pour chaque
palier. L’influence du balourd Bt 1 est la différence entre les nouveaux vecteurs et les vecteurs initiaux.
Influence d e B t 1 sur palier1
Influence d e B t 1 sur palier2
X 2 origine
X 1 origine X 1 te s t
D T 2515 A
X 2 te s t
03026_A_F © 2005 ENSPM Formation Industrie - IFP Training
24
Les coefficients d’influence sont définis comme :
X 1 test − X 1 origine
Influence plan1 sur palier1 =
Bt1
X 2 test − X 2 origine
Influence plan1 sur palier2 =
Bt 1
Les coefficients d’influence sont des termes complexes (au sens mathématique) contenant les notions
d’amplitude et de phase. Les analyses de dynamique de rotor permettent de prédire ces termes, en
réalisant des réponses aux balourds.
Quand toutes les acquisitions sont effectuées pour chaque palier et chaque plan, (par exemple ici pour
2 paliers, 2 vitesses de rotation et 4 plans d’équilibrage), les balourds correcteurs Bc sont calculés à
partir de la formule suivante afin de réduire au minimum la vibration résiduelle :
X1 origine à N1 I11 I12 I13 I14 Bc1 0
X 2 origine à N1 I I I23 I24 Bc2 0
+ 21 22 =
X 1 origine à N2 J11 J12 J13 J14 Bc3 0
X origine à N J J24 Bc4 0
2 2 21 J 22 J23
Si nous avons autant de mesures que de balourd correcteurs, comme dans le cas ci-dessus, on
obtient ces balourds directement en inversant la matrice des coefficients d’influence. Si l’on a plus de
mesures, on utilise une méthode de moindres carrés pour réduire au minimum la réponse sur toutes
les vitesses de rotation. Si l’on a moins de mesures, ou des mesures non indépendantes, les
équations sont mal conditionnées et la solution est impossible, avec un résultat inefficace.
L’expérience du personnel d’équilibrage est un facteur important pour obtenir rapidement un bon
équilibrage, donc un bon comportement vibratoire.
03026_A_F © 2005 ENSPM Formation Industrie - IFP Training
25
5- VIBRATIONS DE TORSION
Une analyse de torsion doit être réalisée sur la ligne d’arbres complète. Les accouplements et les
bouts d’arbre sont des éléments flexibles qui définissent les fréquences propres. Quand il y a un
réducteur, il faut savoir que les couples et les amplitudes sont affectés par le rapport de vitesse ; le
modèle mathématique est alors différent de la ligne d’arbres physique (inerties et raideurs d’une
branche doivent être multipliées par le carré du rapport de vitesse). Il faut également faire attention aux
lignes d’arbres contenant un variateur hydraulique de vitesse, parce que les vibrations de torsion ne
sont pas forcément transmises par les aubes.
a - Méthodes de calculs
Les fréquences propres et les formes modales sont calculées par les méthodes :
- de Holzer, qui est une méthode de fonction de transfert avec un vecteur de dimension 2,
l’utilisation de cette méthode est souvent limitée aux lignes d’arbres droites sans
branchement
- matricielles dérivées des méthodes aux éléments finis, qui sont plus générales
Les analyses de torsion nécessitent beaucoup de calculs de réponses à diverses excitations. Ces
calculs sont réalisés avec une méthode de réponse modale, analytique ou numérique (intégration
temporelle), suivant le type d’excitation (stationnaire ou non).
Modèle
physique
Moteur Multi compresseur
D T 2516 A
Modèle mathématique
Ligne d’arbres
03026_A_F © 2005 ENSPM Formation Industrie - IFP Training
26
b - Fréquences propres - Modes propres – Vitesses critiques
Les fréquences propres sont représentées sur un diagramme de Campbell. La connaissance de la
forme modale de torsion est importante pour les calculs de réponses aux excitations. Les vitesses
critiques sont la coïncidence d’une fréquence propre et d’une vitesse de rotation. Dans le cas d’une
ligne d’arbres avec un réducteur, il faut se rappeler qu’il y a deux vitesses de rotation, et donc deux
gammes différentes de vitesse.
Mode propre à F1
Mode propre à F3
Mode propre à F2
D T 2517 A
Modes propres de torsion
Couple d'excitation
Fréquences
F4
Temps
Ligne
grande
Résonance vitesse Réponse du tronçon i
F3
Vitesses
critiques
Temps
F2
Ligne
petite Réponse du tronçon j
F1 vitesse
D T 2518 A
Temps
N1 N 2 Vitesse
Diagramme de Campbell Réponse au court-circuit
03026_A_F © 2005 ENSPM Formation Industrie - IFP Training
27
c - Réponses aux excitations
Deux types principaux d’excitations sont appliqués aux lignes d’arbre :
- excitations stationnaires, avec des amplitudes généralement faibles
- excitations instationnaires, avec des amplitudes élevées dues les machines électriques
• Excitations stationnaires
Il n’est pas toujours possible, par modification des accouplements d’éviter toute vitesse critique dans
les plages de vitesse. Ainsi, des calculs de réponse sont nécessaires pour évaluer la résistance de
fatigue de la ligne d’arbres. Les excitations considérées sont dues au fonctionnement et liées à la
cinématique de la ligne d’arbres :
- les balourds
- les défauts d’accouplement (non-uniformité angulaire)
- les défauts d’engrenage (non-uniformité angulaire de denture)
- les défauts de lignage (2ème harmonique de la vitesse de rotation)
- les moteurs électriques à vitesse variable (couple “pendulaire” sur les harmoniques 6 ou 12
de la fréquence électrique du moteur)
12 Fr + 12 Fm
Légende
24 Fm 18 Fm 12 Fm 6 Fr + 6 Fm Fr fréquence réseau (fixe)
Fm fréquence moteur électrique (variable)
12 Fr Harmoniques
6 Fm 6, 12, 18, … de Fr
de Fm
6 Fr Combinaisons linéaires de
12 Fm - 12 F r 6 Fr et 6 Fm
D T 2519 A
12 Fr - 12 F m
12 Fr et 12 Fm
6 Fm - 6 Fr
6 Fr - 6 Fm
Vitesse de rotation
Fréquence d’excitation d’un moteur électrique à vitesse variable
Le critère d’acceptation, si une vitesse critique est dans la plage de vitesse, est la résistance en
fatigue, représentée dans un diagramme de Goodmann ou dans un diagramme de Haigh (les
contraintes dynamiques, y compris les concentrations de contrainte, doivent rester inférieures à la
limite de fatigue).
03026_A_F © 2005 ENSPM Formation Industrie - IFP Training
28
• Excitations instationnaires
Ces excitations sont dues aux machines électriques et concernent :
- les courts circuits des moteurs ou des alternateurs (le couple instantané maximal peut
atteindre 10 fois le couple nominal)
- les démarrages des moteurs électrique à l’enclenchement du disjoncteur (établissement du
flux magnétique à la mise sous tension)
- les démarrages des moteurs synchrones (excitation à fréquence variable depuis la
fréquence de réseau jusqu’à 0 traversant les vitesses critiques de torsion)
D’une façon générale les contraintes générées par ces chargements sont plus élevées que la limite de
fatigue des matériaux mais le nombre de tels événements est limité dans la vie de la machine. Ainsi, le
critère d’acceptation est une résistance en fatigue exprimée en limite d’endommagement, c’est-à-dire
en nombre autorisé de démarrages.
03026_A_F © 2005 ENSPM Formation Industrie - IFP Training
29
III - SURVEILLANCE DE LIGNE D'ARBRE
1- SURVEILLANCE GÉNÉRALE DES LIGNES D'ARBRES
La surveillance des paliers radiaux est essentiellement un contrôle thermique, pour être sûr que
l’antifriction peut résister (point de fusion 125 et 150°C) :
- surveillance des températures d’huile, et de la pression d’alimentation
- surveillance de la température des patins oscillants par des thermocouples intégrés
La surveillance des vibrations radiales sera examinée plus loin.
La surveillance de la butée concerne :
- la température d’huile et la pression d’alimentation
- la température des patins oscillants
- la position relative du collet par des capteurs à courant de Foucault
- parfois la poussée par des capteurs piézo-électriques situés sous les pivots de patins
Un autre type de surveillance associé au fonctionnement des paliers est la surveillance de la qualité de
l’huile. L’évolution de la composition et en particulier des éléments métalliques fournit une information
sur l’usure de la pivoterie.
D’une autre manière, la surveillance tachymétrique peut être associée à la surveillance de la ligne
d’arbres. Une référence de phase est également utile pour exécuter l’équilibrage in situ.
2- SURVEILLANCE VIBRATOIRE
La santé des machines tournantes est très fortement liée à son comportement vibratoire (à basses
niveau de vibration, constance et reproductibilité des niveaux, service de traverser les vitesses
critiques ou les régimes transitoires).
a - Surveillance du niveau global de vibration
Un contrôle continu est réalisé par des capteurs de courant de Foucault. L’indicateur de niveau et les
alarmes sont inclus dans l’armoire de contrôle commande. Les machines équipées des paliers
magnétiques actifs n’ont pas besoin de capteurs spécifiques pour surveiller les vibrations, puisque
celles-ci sont incluses dans la mesure de position.
D’une façon générale, les capteurs sont installés dans deux directions orthogonales afin de pouvoir
examiner la forme des orbites sur un oscillographe.
Pour les petites machines tournantes qui ne nécessitent pas de surveillance continue, on réalise un
contrôle périodique par des collecteurs de données de vibration.
Pour les réducteurs ou multiplicateurs, on préfère des capteurs de vitesse ou d’accélération vibratoire
sur les corps de paliers aux capteurs de vibration relative d’arbre, parce que leur type de mesure est
mieux adapté à la surveillance des vibrations produites par les dentures.
b - Analyse fréquentielle
La connaissance de la composition fréquentielle du signal fourni par les capteurs donne beaucoup
d’informations sur le comportement dynamique de la machine. En cas de problème, il est absolument
nécessaire d’avoir cet élément pour effectuer un diagnostic.
On obtient les spectres vibratoires par des analyseurs FFT (transformée de Fourier rapide, le mot
“rapide” étant lié au logiciel). On préfère utiliser un analyseur multi-voie, pour avoir les relations de
phase et d’amplitude entre différentes directions de mesure.
03026_A_F © 2005 ENSPM Formation Industrie - IFP Training
30
Il faut noter sur que les systèmes de surveillance du paragraphe précédent sont parfois équipés
d’analyses FFT, qui enregistrent périodiquement des spectres de vibration, utilisés pour faire des
prévisions de tendances (ou du diagnostic en cas de problème).
La surveillance par FFT est effectuée par des bandes de fréquence par rapport à la vitesse de rotation.
Une table générale est donnée ici après. Chaque type de machine tournante a ses propres lois de
surveillance fréquentielle.
c - Bases de données
L’enregistrement automatique et périodique des spectres de vibration avec les conditions de
fonctionnement correspondantes, constitue une base de données extrêmement importante sur l’état de
santé de la machine. Les analyses paramétriques entre les mesures déterminent des corrélations et
des tendances utilisées dans la maintenance prédictive ou conditionnelle.
d - Diagnostic
En cas de problème, l’information vibratoire est fournie par la surveillance et les analyses FFT. Il faut
remarquer que l’opérateur a une part majeure de l’information sur les conditions de fonctionnement,
les enregistrements sur site, l’historique de machine, et les conditions d’environnement. Par contre, le
fabricant de machine a les détails de conception et les résultats d’essais de réception, qui sont
également nécessaires.
e - Maintenance prédictive ou conditionnelle
La maintenance prédictive est l’un des buts importants de la surveillance vibratoire.
03026_A_F © 2005 ENSPM Formation Industrie - IFP Training
31
3- SURVEILLANCE ACOUSTIQUE
Les émissions acoustiques des machines tournantes contiennent la même information fréquentielle
que les vibrations. L’avantage principal est de pas nécessiter de mesure intrusive. Cette technique
sera utilisée à l’avenir en liaison avec la surveillance vibratoire.
Nature Fréquence Direction Remarques
Décrochage tournant de
5 % à 15 % de N Radiale Fonctionnement à petit débit
diffuseur lisse
Fouettement d’huile 42 % à 48 % de N Radiale Cas des paliers lisses
Décrochage tournant de roue 65 % à 75 % de N Radiale Fonctionnement à petit débit
En vitesse variable, la vibration
Vitesse critique à N = vitesse critique Radiale ou axiale
atteint un maximum puis diminue
Amplitude fonction de N
Balourd N Radiale Phase = 90° entre les directions X
et Y
Instabilité subsynchrone Fréquence propre Radiale Amplitudes fluctuantes
Vibration plus élevée en axial
Défaut de lignage 2 N (avec N et 3N) Axiale + radiale
qu’en radial si délignage angulaire
Fixation d’enveloppe 1, 2, 3, 4... n Radiale Spectre de choc
Présence de perturbations
Excitations électriques harmoniques de 50 Axiale + radiale
électromagnétiques
Hz
Fd - Fréquence Présence de bandes latérales
Denture endommagée Radiale + axiale
d’engrènement dans le spectre
Circularité d’engrenage Fd N Radiale + axiale Bandes latérales
Excitations aérodynamiques N * nombre d’aubes Radiale + axiale
6 ou 12 * fréquences
Moteurs électriques à vitesse
Excitations électriques réseau et fréquence Radiale + axiale
variable
moteur
Fréquence de
Roulements à billes passage des billes + Radiale + axiale Présence de chocs
haute fréquence
Tableau de surveillance vibratoire
03026_A_F © 2005 ENSPM Formation Industrie - IFP Training
Vous aimerez peut-être aussi
- Le Taux Vibratoire PDFDocument15 pagesLe Taux Vibratoire PDFLuca TascaPas encore d'évaluation
- Pierre Franckh - La Loi de Résonance (PDF)Document241 pagesPierre Franckh - La Loi de Résonance (PDF)zangalewa100% (10)
- Cours Machines Tournantes Compresseurs Tech EXP 2Document171 pagesCours Machines Tournantes Compresseurs Tech EXP 2Mohamed Amine BouamranePas encore d'évaluation
- CH13 - Pompe Centrifuge Poussées HydrauliqueDocument25 pagesCH13 - Pompe Centrifuge Poussées HydrauliqueSarra BÉCHIRI100% (2)
- TD Extra Forage m3Document76 pagesTD Extra Forage m3عبد العزيز مروىPas encore d'évaluation
- Cours Equipements StatiquesDocument107 pagesCours Equipements Statiquesرضا بن عمارPas encore d'évaluation
- Et - Actions Du Trafic Ferroviaire Et Autres-Actions Specifiques Sur Les Ponts-RailsDocument86 pagesEt - Actions Du Trafic Ferroviaire Et Autres-Actions Specifiques Sur Les Ponts-RailsPedro HenriquesPas encore d'évaluation
- Technologie Et Fonctionnement: - 5 Turbines À GazDocument21 pagesTechnologie Et Fonctionnement: - 5 Turbines À GazMediterranei ExypniPas encore d'évaluation
- D5 2 B GarnituresDocument0 pageD5 2 B GarnituresCasanova HuomoPas encore d'évaluation
- Science Des Materiaux - IUT - 03 PDFDocument59 pagesScience Des Materiaux - IUT - 03 PDFtungaas20011Pas encore d'évaluation
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- Turbomachines - Principes de BaseDocument16 pagesTurbomachines - Principes de BaseAbderrahmane FarèsPas encore d'évaluation
- Rapport FinalDocument90 pagesRapport FinalHassan Gc Bessaha100% (2)
- RLCDocument9 pagesRLCfilfr100% (1)
- D5 7Document21 pagesD5 7iclix4749100% (1)
- 013 Définition TechniqueDocument13 pages013 Définition Techniqueljmkouy100% (2)
- Article Plocher Par JF-CoulangeDocument6 pagesArticle Plocher Par JF-CoulangehoussinguyPas encore d'évaluation
- Physique - Échangeurs - Fours: Examen FinalDocument14 pagesPhysique - Échangeurs - Fours: Examen Finalbentata abdelhak100% (1)
- Bac PCDocument56 pagesBac PCOumar Traoré100% (2)
- Superalliage: Résistant à la chaleur de 2700 degrés Fahrenheit générée par les moteurs à turbine pour être plus chaud, plus rapide et plus efficaceD'EverandSuperalliage: Résistant à la chaleur de 2700 degrés Fahrenheit générée par les moteurs à turbine pour être plus chaud, plus rapide et plus efficacePas encore d'évaluation
- Cour DMT M2 FMPDocument32 pagesCour DMT M2 FMPʚǐɞ Zõlã ʚǐɞPas encore d'évaluation
- Chapitre 1 - Notions Fondamentales D'équilibrageDocument14 pagesChapitre 1 - Notions Fondamentales D'équilibrageSayf BouyeddaPas encore d'évaluation
- Alliages de Nickel Résistant À La Corrosion HumideDocument21 pagesAlliages de Nickel Résistant À La Corrosion HumideOualidPas encore d'évaluation
- Specification Raffinage SG RM Ins 104: Principe Des Representations Graphiques de L'Instrumentation Sur PidDocument37 pagesSpecification Raffinage SG RM Ins 104: Principe Des Representations Graphiques de L'Instrumentation Sur PidWilson NjangePas encore d'évaluation
- Exploitation Et Maintenance Des Pompes CentrifugesDocument134 pagesExploitation Et Maintenance Des Pompes Centrifugesmouad jaidanePas encore d'évaluation
- Les Réfrigérateurs, Les Congélateurs. - Les Anti Sèches de L'atelierDocument76 pagesLes Réfrigérateurs, Les Congélateurs. - Les Anti Sèches de L'atelierMiliani Ahmed100% (1)
- Chapitre N 1 Généralité Sur Les Compresseurs1Document30 pagesChapitre N 1 Généralité Sur Les Compresseurs1Nafti NaftiPas encore d'évaluation
- Turbo Oil T 46Document3 pagesTurbo Oil T 46greendayzarePas encore d'évaluation
- Transmission Courroies Trapézoïdales Technique 04 Calcul Transmissions - OPTIBELT - 2008Document8 pagesTransmission Courroies Trapézoïdales Technique 04 Calcul Transmissions - OPTIBELT - 2008louis666frPas encore d'évaluation
- Technologie Et Fonctionnement: - 4 Turbo-ExpandeursDocument4 pagesTechnologie Et Fonctionnement: - 4 Turbo-ExpandeursMediterranei ExypniPas encore d'évaluation
- Turbomachines - Thermodynamique de La Conversion D'énergieDocument9 pagesTurbomachines - Thermodynamique de La Conversion D'énergieatamed32100% (1)
- Cheurfi ABDERRAHIM Amarache SALIM PDFDocument112 pagesCheurfi ABDERRAHIM Amarache SALIM PDFQuick sickPas encore d'évaluation
- Cours Pompe Volumétrique - Système de Réglage de DébitDocument2 pagesCours Pompe Volumétrique - Système de Réglage de DébitDca Kdne100% (1)
- TD 2Document2 pagesTD 2Bahi GreidPas encore d'évaluation
- 4 - Principaux Matériaux 20sep12Document17 pages4 - Principaux Matériaux 20sep12Wilson Njange50% (2)
- C4 2Document22 pagesC4 2Hoang-Vu BuiPas encore d'évaluation
- Alignement Des Machines Tournantes IAPDocument62 pagesAlignement Des Machines Tournantes IAPSalah eddinePas encore d'évaluation
- Pocket Guide Courroies PDFDocument124 pagesPocket Guide Courroies PDFFrancisPas encore d'évaluation
- Seance 1 2016 2017Document66 pagesSeance 1 2016 2017YounessElkarkouriPas encore d'évaluation
- Pompes Rotodynamiques: Présentation. DescriptionDocument11 pagesPompes Rotodynamiques: Présentation. Descriptionbsaid77Pas encore d'évaluation
- Présentation Equipements Statiques D1 D2 2 2021Document104 pagesPrésentation Equipements Statiques D1 D2 2 2021imenePas encore d'évaluation
- Cinema Ti Que Des MecanismesDocument16 pagesCinema Ti Que Des MecanismeskroumaPas encore d'évaluation
- Heat Exchangers3Document91 pagesHeat Exchangers3Sarra BÉCHIRIPas encore d'évaluation
- BEMChap3 (Vilebrequin 1 Contraintes) PDFDocument9 pagesBEMChap3 (Vilebrequin 1 Contraintes) PDFTriki BilelPas encore d'évaluation
- Tribologie: Master II Ingénierie MécaniqueDocument4 pagesTribologie: Master II Ingénierie MécaniqueDjamel DjamPas encore d'évaluation
- EXP-PR-UT040-FR-R0 - Slides Eau DouceDocument48 pagesEXP-PR-UT040-FR-R0 - Slides Eau Doucefasert sarytghPas encore d'évaluation
- Chapitre 22Document33 pagesChapitre 22nesrine10Pas encore d'évaluation
- d02 0 Tribologie IntroDocument1 paged02 0 Tribologie IntroMohamed MohamedPas encore d'évaluation
- Dimensionnement FlexibleDocument32 pagesDimensionnement FlexibleEric Lambert100% (1)
- 24 - 01226 - A - FdéfautsSoudures07 PDFDocument16 pages24 - 01226 - A - FdéfautsSoudures07 PDFWilson Njange100% (1)
- Mémoire RB5B. BerrihaDocument109 pagesMémoire RB5B. BerrihaaliPas encore d'évaluation
- Traitements de Surface Par Voie Humide2Document2 pagesTraitements de Surface Par Voie Humide2OualidPas encore d'évaluation
- Pompe 2Document41 pagesPompe 2Kader Bakour100% (1)
- Les MateriauxDocument20 pagesLes MateriauxSerigne Abdoul Aziz MbodjPas encore d'évaluation
- Cours ÉchangeursDocument73 pagesCours ÉchangeursReda ChattahyPas encore d'évaluation
- Chap3 PDFDocument30 pagesChap3 PDFAbderrahmane DEHIBA100% (1)
- Memotec 34-CriteresPompesCentrigugesDocument2 pagesMemotec 34-CriteresPompesCentrigugesSofiane HalimiPas encore d'évaluation
- Chapitre 4Document37 pagesChapitre 4mohamed aminePas encore d'évaluation
- Domaine Maintenance: Equipement ElectriqueDocument77 pagesDomaine Maintenance: Equipement ElectriqueNajim AarabPas encore d'évaluation
- IFP Brochure Co2 VFDocument16 pagesIFP Brochure Co2 VFkolabot100% (2)
- Circuit de Réfrigération PDFDocument24 pagesCircuit de Réfrigération PDFrezokaPas encore d'évaluation
- Traitement Des SolidesDocument32 pagesTraitement Des Solidesamine100% (1)
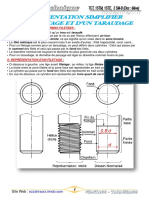
- 05-Notion de FiletageDocument8 pages05-Notion de Filetageommasa2006Pas encore d'évaluation
- 83 SGN 468 EauDocument73 pages83 SGN 468 EauTamara CebotariPas encore d'évaluation
- 4 Exemple Classes Tuyauteries PDFDocument197 pages4 Exemple Classes Tuyauteries PDFNeo PacifistaPas encore d'évaluation
- CM Palier Lisse 09 09V5Document20 pagesCM Palier Lisse 09 09V5Alexandru Daniel Gherman100% (1)
- Boite Auto CVT NissanDocument7 pagesBoite Auto CVT Nissannord reprogPas encore d'évaluation
- Cours5 MoteurDocument5 pagesCours5 MoteurrabbajPas encore d'évaluation
- A3 - Dangers Liée Au Comportement Des Fluides 2Document13 pagesA3 - Dangers Liée Au Comportement Des Fluides 2Abdelkader MebarkiPas encore d'évaluation
- CP01008Z11FR 0313 Sil-BdDocument16 pagesCP01008Z11FR 0313 Sil-BdMohamed OmarPas encore d'évaluation
- Inbound 3320957269441451460Document14 pagesInbound 3320957269441451460Abdelkader MebarkiPas encore d'évaluation
- Extrait 42155210Document157 pagesExtrait 42155210Abdelkader MebarkiPas encore d'évaluation
- Depliant CoupureVFDocument3 pagesDepliant CoupureVFAbdelkader MebarkiPas encore d'évaluation
- Omega ReportDocument66 pagesOmega ReportHassen40Pas encore d'évaluation
- Omega ReportDocument66 pagesOmega ReportHassen40Pas encore d'évaluation
- Guide MMRIDocument17 pagesGuide MMRIAbdelkader MebarkiPas encore d'évaluation
- OnduleurDocument2 pagesOnduleurYesmaRofiaPas encore d'évaluation
- DDS Serie 3 2021Document2 pagesDDS Serie 3 2021Sara BenameurPas encore d'évaluation
- QualitéDocument8 pagesQualitéAbderrahmane BinPas encore d'évaluation
- OUMMO - Inconnu (E)Document69 pagesOUMMO - Inconnu (E)jotowPas encore d'évaluation
- Pierre FRANCKH - La Loi de Résonance !Document103 pagesPierre FRANCKH - La Loi de Résonance !jimmy100% (1)
- Rappels Cours de Circuits ÉlectriquesDocument12 pagesRappels Cours de Circuits ÉlectriqueshoxxosPas encore d'évaluation
- SISMOLOGIE APPLIQUEE Niveau Sup Vol 2 Ondes PDFDocument53 pagesSISMOLOGIE APPLIQUEE Niveau Sup Vol 2 Ondes PDFWalter La Madrid OchoaPas encore d'évaluation
- Fiche de TD Comportement Dynamique 2023++Document18 pagesFiche de TD Comportement Dynamique 2023++E-skills CorporationPas encore d'évaluation
- TP Oscillations Mécanique Pendule de PohlDocument3 pagesTP Oscillations Mécanique Pendule de PohlInes delacroix100% (1)
- RLC ForceeDocument9 pagesRLC Forceebelbel4321100% (1)
- Combine PDFDocument48 pagesCombine PDFMouadElOuadifi100% (1)
- Gratte-Ciels Et Tours: A 2007 Phys. Ii MPDocument6 pagesGratte-Ciels Et Tours: A 2007 Phys. Ii MPMihnea GamanPas encore d'évaluation
- TPH2Document12 pagesTPH2OussamaOussFellahPas encore d'évaluation
- Communicaton01tebessa 2Document9 pagesCommunicaton01tebessa 2abdouPas encore d'évaluation
- CH11 Oscillateur Excitation ResonanceDocument14 pagesCH11 Oscillateur Excitation ResonanceJagoda PasikowskaPas encore d'évaluation
- Plan de Phase Pour Les Circuits LCDocument33 pagesPlan de Phase Pour Les Circuits LCAicha Ahmed SalekPas encore d'évaluation
- Etude Des Oscillations Rotationnelles Amorties Libres Et Forcées-Pendule de PohlDocument11 pagesEtude Des Oscillations Rotationnelles Amorties Libres Et Forcées-Pendule de PohlSaid Boustta100% (1)
- Modele de Rotor de JeffcottDocument32 pagesModele de Rotor de JeffcottMoulay ZoubirPas encore d'évaluation
- Magazine Les Oscillations Electriques Forcee EnonceDocument16 pagesMagazine Les Oscillations Electriques Forcee EnonceNesrine Nouira100% (1)
- WCIPDocument26 pagesWCIPAsmaa ZugariPas encore d'évaluation
- Oscillations Forcées Harmoniques Et ChaotiquesDocument6 pagesOscillations Forcées Harmoniques Et ChaotiquesaklamosPas encore d'évaluation
- QCM Chapitre 1 B 204Document3 pagesQCM Chapitre 1 B 204RevedrEPas encore d'évaluation