Vous aimerez peut-être aussi
- Rapport de Mini Projet DDocument17 pagesRapport de Mini Projet DOumar TraoréPas encore d'évaluation
- Rapport de Mini Projet DDocument17 pagesRapport de Mini Projet DOumar TraoréPas encore d'évaluation
- Compte RenduDocument14 pagesCompte RenduHanan KHEZOUPas encore d'évaluation
- tp2 Red1Document9 pagestp2 Red1Alec WalkerPas encore d'évaluation
- TP 1Document9 pagesTP 1Alec WalkerPas encore d'évaluation
- T.P22 Ecole National Superieur de TéchnologieDocument8 pagesT.P22 Ecole National Superieur de TéchnologieChellali RabahPas encore d'évaluation
- Ag Int 2004 Corrige AutomatisationDocument27 pagesAg Int 2004 Corrige Automatisationkhiati hadjPas encore d'évaluation
- ICNA 2004 Com Phys CorrigeDocument7 pagesICNA 2004 Com Phys Corrigesalah feqqoussiPas encore d'évaluation
- Sujet Bacf234 2022Document6 pagesSujet Bacf234 2022Joseph AttignonPas encore d'évaluation
- Equation DynamicDocument9 pagesEquation Dynamicfatima zahera HarrarPas encore d'évaluation
- Solutuion de TD1 - Commande Des Machines ElectriquesDocument3 pagesSolutuion de TD1 - Commande Des Machines ElectriquesHassen Brahim100% (1)
- 1962 AIeazeazeDocument8 pages1962 AIeazeazeazer qsdfPas encore d'évaluation
- Transforme Un MouvementDocument4 pagesTransforme Un MouvementMissaoui LtayefPas encore d'évaluation
- Elements de Reponse Sujet Robot Ubbo MakerDocument9 pagesElements de Reponse Sujet Robot Ubbo MakerperroPas encore d'évaluation
- Station de PompageDocument4 pagesStation de PompageMajd FerchichiPas encore d'évaluation
- Dimensionnement DDS - Arbres en Flexion Et Torsion ExempleDocument8 pagesDimensionnement DDS - Arbres en Flexion Et Torsion ExemplemidiquentinPas encore d'évaluation
- Calcul Et Choix Des RoulementsDocument5 pagesCalcul Et Choix Des RoulementsMOHAMED CHARJAOUIPas encore d'évaluation
- AscenseurDocument19 pagesAscenseurHamou Melloul100% (2)
- 004b Dimensionnement HeliceDocument5 pages004b Dimensionnement HeliceCoen SchoenmakersPas encore d'évaluation
- Projet HydrauliqueDocument37 pagesProjet HydrauliquemedyoumPas encore d'évaluation
- Chapitre 4Document18 pagesChapitre 4Fa TehPas encore d'évaluation
- 03 Solut JanvierDocument3 pages03 Solut JanvierDaoud El CaidPas encore d'évaluation
- AscenseurDocument20 pagesAscenseurMohamed MehdiPas encore d'évaluation
- Corriges Autres EnergetiqueDocument3 pagesCorriges Autres Energetiqueay. insPas encore d'évaluation
- Evaluation Finale S2 Automatique 2022Document4 pagesEvaluation Finale S2 Automatique 2022OMAR RAHALIPas encore d'évaluation
- Etude de La PileDocument17 pagesEtude de La PileFousma SmailPas encore d'évaluation
- Fiche TD 01 CorrigéDocument4 pagesFiche TD 01 CorrigéachrefPas encore d'évaluation
- TP Mecanique FinalDocument22 pagesTP Mecanique FinalAFADPas encore d'évaluation
- Calcul Au Vent D'un Hangar IndustrielDocument10 pagesCalcul Au Vent D'un Hangar IndustrielIKKENE67% (3)
- Courroies Solutions1 PDFDocument9 pagesCourroies Solutions1 PDFmessiPas encore d'évaluation
- TP Moteur ShuntDocument10 pagesTP Moteur ShuntYoucef SouidiPas encore d'évaluation
- TP 03 Moteur ShuntDocument7 pagesTP 03 Moteur Shuntʚïɞ OùŠšàmà ʚïɞ89% (9)
- Tp3 Gyroscope MecaniqueDocument7 pagesTp3 Gyroscope MecaniqueDada Baba100% (1)
- Corrige Automatique 2000 ADocument28 pagesCorrige Automatique 2000 ADjilani Hassan GadittoPas encore d'évaluation
- CorrigecompletSI12mai Science de L'ingénieurDocument9 pagesCorrigecompletSI12mai Science de L'ingénieurKaled MRASSIPas encore d'évaluation
- Dimensionnement Du Réducteu1Document9 pagesDimensionnement Du Réducteu1Layla OmariPas encore d'évaluation
- Simulation Du Transfert de Chaleur D'un Échnageur de Type ConsnetriqueDocument15 pagesSimulation Du Transfert de Chaleur D'un Échnageur de Type Consnetriquekr saadPas encore d'évaluation
- Freins Et Embrayages2 PDFDocument18 pagesFreins Et Embrayages2 PDFInfoTechNewsPas encore d'évaluation
- FormulaireEquivalence335 PDFDocument2 pagesFormulaireEquivalence335 PDFKasai RanPas encore d'évaluation
- Chapitre Ascenseur Kiari KennicheDocument19 pagesChapitre Ascenseur Kiari KennicheFarouk KennichePas encore d'évaluation
- 6070234Document3 pages6070234Abdelhak GuettiPas encore d'évaluation
- TD Asservissements-Robdrive - Série 4-RSDocument8 pagesTD Asservissements-Robdrive - Série 4-RSSoufiane AzikiPas encore d'évaluation
- tp3 FluideDocument5 pagestp3 FluidesayemoumaymaPas encore d'évaluation
- Metho I4423 Choix Calcul Demarrage.v112Document2 pagesMetho I4423 Choix Calcul Demarrage.v112Helyette KinguePas encore d'évaluation
- Correction U42 2021-1Document12 pagesCorrection U42 2021-1J ZNAIDIAPas encore d'évaluation
- Sans TitreDocument7 pagesSans TitrePap's RM-Pas encore d'évaluation
- Corrige CompletDocument11 pagesCorrige Completisrael melchisedechPas encore d'évaluation
- Exercices Rlts Corriges v2Document4 pagesExercices Rlts Corriges v2Soufi Badr100% (4)
- Metho I4423 Choix Calcul Demarrage.v112Document2 pagesMetho I4423 Choix Calcul Demarrage.v112tytyPas encore d'évaluation
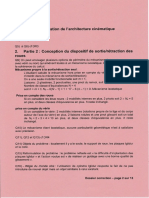
- Partie A-Cinématique Du Système de Dépliage de La Flèche: Ne Rien Mettre Dans Cet EntêteDocument7 pagesPartie A-Cinématique Du Système de Dépliage de La Flèche: Ne Rien Mettre Dans Cet EntêteJean-Philippe Dal ZottoPas encore d'évaluation
- Abs Modél deDocument24 pagesAbs Modél deRazzaq SalimaPas encore d'évaluation
- MCCDocument6 pagesMCCgengis_khan100% (1)
- TP2:Méthode Des Moindres Carrés Généralisés: I. ButDocument10 pagesTP2:Méthode Des Moindres Carrés Généralisés: I. ButSarra SdiriPas encore d'évaluation
- Mini ProjetDocument22 pagesMini ProjetOumar SissokoPas encore d'évaluation
- Examen Automatique1A 2016 Plus CorrectionDocument19 pagesExamen Automatique1A 2016 Plus Correctionhalim otmanePas encore d'évaluation
- TP3 Identification de MCCDocument5 pagesTP3 Identification de MCCBounegab YoucefPas encore d'évaluation
- The New Wall eDocument33 pagesThe New Wall eMohammed reda HadiPas encore d'évaluation
- Baccalaureat 2005Document32 pagesBaccalaureat 2005Mohammed reda HadiPas encore d'évaluation
- Batteries Energie-SolaireDocument1 pageBatteries Energie-SolaireMohammed reda HadiPas encore d'évaluation
- Distributeur de Médicaments Sécurise Par Empreinte Digitale Ou (Enregistrement Automatique)Document30 pagesDistributeur de Médicaments Sécurise Par Empreinte Digitale Ou (Enregistrement Automatique)Mohammed reda HadiPas encore d'évaluation
- MedicineDocument13 pagesMedicineMohammed reda HadiPas encore d'évaluation
- Distributeur de Médicaments Sécurise Par Empreinte Digitale Ou RFIDDocument30 pagesDistributeur de Médicaments Sécurise Par Empreinte Digitale Ou RFIDMohammed reda HadiPas encore d'évaluation
- Calcul Du VentDocument8 pagesCalcul Du VentAlex FezeuPas encore d'évaluation
- Solution de La Série de TD #01 Thermodynamique Des ÉquilibresDocument3 pagesSolution de La Série de TD #01 Thermodynamique Des ÉquilibresCherif LaifaPas encore d'évaluation
- Cinematique PDFDocument8 pagesCinematique PDFguetardPas encore d'évaluation
- Page FacebookDocument5 pagesPage FacebookBazouanePas encore d'évaluation
- Guide Véritas - Fondation RadierDocument6 pagesGuide Véritas - Fondation RadierANSALDIPas encore d'évaluation
- ENR Hydraulique Episode 3Document4 pagesENR Hydraulique Episode 3Mounaim MatiniPas encore d'évaluation
- Physique A Chap2 Ondes - PeriodiquesDocument5 pagesPhysique A Chap2 Ondes - PeriodiquesIsmail ait talebPas encore d'évaluation
- 2006 Liban Exo1 Correction Meca Logan 9ptsDocument5 pages2006 Liban Exo1 Correction Meca Logan 9ptsaa.aa1Pas encore d'évaluation
- Série 2 TD Thermodynamique AP2 2021 - 2022Document3 pagesSérie 2 TD Thermodynamique AP2 2021 - 2022Karima HamdanPas encore d'évaluation
- TP 6 Etude Reducteur Train EpicycloidalDocument12 pagesTP 6 Etude Reducteur Train EpicycloidalLAALAIFAICELPas encore d'évaluation
- RakotondrabeTojonirinaJeanC ESPA MAST 19Document120 pagesRakotondrabeTojonirinaJeanC ESPA MAST 19Med ChePas encore d'évaluation
- Cours MA Chap 5pDocument27 pagesCours MA Chap 5pzouarzouar2Pas encore d'évaluation
- Comment Calculer La Force de Flexion de Votre Presse Plieuse - HARSLE MACHINEDocument8 pagesComment Calculer La Force de Flexion de Votre Presse Plieuse - HARSLE MACHINEبلال بن عميرهPas encore d'évaluation
- Rheologie Dal MardDocument11 pagesRheologie Dal MardCHAHID MOHAMMEDPas encore d'évaluation
- Cours - Sciences Physiques Action Mécanique Force - 1ère As (2013-2014) MR Sdiri AnisDocument4 pagesCours - Sciences Physiques Action Mécanique Force - 1ère As (2013-2014) MR Sdiri AnisYosri GostPas encore d'évaluation
- Electrocinetique Regime Sinusoidal Force PDFDocument7 pagesElectrocinetique Regime Sinusoidal Force PDFDjawad Abi AyadPas encore d'évaluation
- Calcul Des Structures - Sollicitations-1Document9 pagesCalcul Des Structures - Sollicitations-1Diadji TallPas encore d'évaluation
- Feurst - Fastkey-2018Document7 pagesFeurst - Fastkey-2018ApexiPas encore d'évaluation
- Note Bande Pleine RDCDocument14 pagesNote Bande Pleine RDCUlrich GBENOUPas encore d'évaluation
- Pendule SimpleDocument18 pagesPendule SimplePablo Emilio100% (1)
- BimeVete11 (Viscosite)Document16 pagesBimeVete11 (Viscosite)eva romePas encore d'évaluation
- Convection + ECHANGEURS Présentation1Document101 pagesConvection + ECHANGEURS Présentation1hana belkacemi100% (1)
- Cinématique Des Milieux Continus: Chapitre IIDocument21 pagesCinématique Des Milieux Continus: Chapitre IISphinx InfiniPas encore d'évaluation
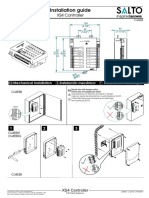
- Installation Guide CU4EB8 225205Document10 pagesInstallation Guide CU4EB8 225205ddcguy3190Pas encore d'évaluation
- Cours Sciences de L'ingénieur1Document36 pagesCours Sciences de L'ingénieur1broukoPas encore d'évaluation
- Cours-2-Caractéristiques Géométriques Des Sections PlanesDocument6 pagesCours-2-Caractéristiques Géométriques Des Sections Planesfz bfsPas encore d'évaluation
- Chap 1 B Houle 1 CorrigéDocument109 pagesChap 1 B Houle 1 CorrigéAssiya BenhammouPas encore d'évaluation
- Calcul Du Volume Utile 3Document65 pagesCalcul Du Volume Utile 3jack GNIMPas encore d'évaluation
- Support de Cours 2023Document115 pagesSupport de Cours 2023Al QuranPas encore d'évaluation
- Sujet Du TD Mécanique Série 2Document2 pagesSujet Du TD Mécanique Série 2Mor Talla MboupPas encore d'évaluation