Vous aimerez peut-être aussi
- Ecri 1Document4 pagesEcri 1KilgravePas encore d'évaluation
- Équations différentielles: Les Grands Articles d'UniversalisD'EverandÉquations différentielles: Les Grands Articles d'UniversalisPas encore d'évaluation
- English Grammar in Use - Fifth Edition (Raymond Murphy)Document10 pagesEnglish Grammar in Use - Fifth Edition (Raymond Murphy)Pkpk StafPas encore d'évaluation
- DST1 - 2019 SHDocument4 pagesDST1 - 2019 SHfocusssmodePas encore d'évaluation
- 1bts Bat Exo2 ComplexesDocument1 page1bts Bat Exo2 ComplexesAmine Ghazdali100% (1)
- TS Mathématiques Test N 1 Du 27/9/2007: Exercice 1Document1 pageTS Mathématiques Test N 1 Du 27/9/2007: Exercice 1MasclePas encore d'évaluation
- ds2022 09 17Document2 pagesds2022 09 17sweetinserenaPas encore d'évaluation
- Devoir Surveillé de Physique N°3 (3 H 30) : Exercice 1: Questions de CoursDocument11 pagesDevoir Surveillé de Physique N°3 (3 H 30) : Exercice 1: Questions de CoursRussel YeoPas encore d'évaluation
- DS02EtudedeFonctionFonctionsusuellesIntegrales PDFDocument6 pagesDS02EtudedeFonctionFonctionsusuellesIntegrales PDFmednourPas encore d'évaluation
- HJFGLJHDocument6 pagesHJFGLJHAmir HàrrouzPas encore d'évaluation
- 2014 Eml E 1 Suj MDD ADocument3 pages2014 Eml E 1 Suj MDD Agonbagui bachelard touakessePas encore d'évaluation
- td8 Algebre - Applications de La Reduction23Document2 pagestd8 Algebre - Applications de La Reduction23hassegoutePas encore d'évaluation
- Ondes Et Vibrations: IUT, Année 2008-09Document16 pagesOndes Et Vibrations: IUT, Année 2008-09Armand StevenskiPas encore d'évaluation
- Corrigé Examen EDHEC 2008 MathsDocument14 pagesCorrigé Examen EDHEC 2008 MathsBertrand GerardPas encore d'évaluation
- Analyse MatricesDocument29 pagesAnalyse MatricesSaint-paul WawehPas encore d'évaluation
- ds1 - 2017 2018 2Document7 pagesds1 - 2017 2018 2Ismaili YoussefPas encore d'évaluation
- Statistiques d'IUT, BERNABOTTODocument33 pagesStatistiques d'IUT, BERNABOTTOelmorabit100% (1)
- Ds-4 2022Document4 pagesDs-4 2022ArrowPas encore d'évaluation
- ds2022 10 08Document2 pagesds2022 10 08sweetinserenaPas encore d'évaluation
- 643e9eb8a4a67 - Énoncé - Magazine 40 - RévisionDocument5 pages643e9eb8a4a67 - Énoncé - Magazine 40 - RévisionHiba BhsPas encore d'évaluation
- Ise CL As 2023 SujetsDocument12 pagesIse CL As 2023 SujetsSchadrac Sylvestre Bouilong BaliabaPas encore d'évaluation
- SArie 2 Modes de Convergence Et ThAorA Me LimitesDocument3 pagesSArie 2 Modes de Convergence Et ThAorA Me Limitessabrina BessalahPas encore d'évaluation
- DS09 Integration ProbaDocument4 pagesDS09 Integration ProbabhffuhPas encore d'évaluation
- DS1 2sm 2019.20203-ConvertiDocument1 pageDS1 2sm 2019.20203-ConvertiL'intégrale de GaussPas encore d'évaluation
- TD 4 AnalyseDocument1 pageTD 4 Analyseyahyahijazi643Pas encore d'évaluation
- Devoir 1 Nov2017 Cle45b4fdDocument2 pagesDevoir 1 Nov2017 Cle45b4fdphilippe dmtPas encore d'évaluation
- Suites 1Document4 pagesSuites 1mar aliPas encore d'évaluation
- Metropole gr-IV C Juin 1988Document3 pagesMetropole gr-IV C Juin 1988Med yahyaPas encore d'évaluation
- TP 5 MODELISATION DE Lâ ™ACTION Dâ ™UN RESSORTDocument2 pagesTP 5 MODELISATION DE Lâ ™ACTION Dâ ™UN RESSORTAmi NaPas encore d'évaluation
- TD1: Vitesses de Convergence.: MNO, L3, Dauphine, 2019-2020Document2 pagesTD1: Vitesses de Convergence.: MNO, L3, Dauphine, 2019-2020pauline chauveauPas encore d'évaluation
- Examen de Rattrapage D'analyse 1Document6 pagesExamen de Rattrapage D'analyse 1Arij ChouchenePas encore d'évaluation
- TD4 Suites 22-23Document2 pagesTD4 Suites 22-23Amina AlalguiPas encore d'évaluation
- TD I MIP (1) - ١٠٠٢٢٣Document4 pagesTD I MIP (1) - ١٠٠٢٢٣Yassine MorokuPas encore d'évaluation
- $2012 ESSEC E2 CorrigéDocument20 pages$2012 ESSEC E2 CorrigéClémentine BRUGUEROLLEPas encore d'évaluation
- DST1 - 2020 Alg Fcts UsuellesDocument2 pagesDST1 - 2020 Alg Fcts UsuellesfocusssmodePas encore d'évaluation
- Examen 117 2000Document8 pagesExamen 117 2000Wang MaxPas encore d'évaluation
- Analyse 3 (TD7)Document10 pagesAnalyse 3 (TD7)kribetyasserPas encore d'évaluation
- .On Pose Pour Tout X 0,, Alors:: ZZ 3x2y1 x4k1 Y6k1 KZDocument2 pages.On Pose Pour Tout X 0,, Alors:: ZZ 3x2y1 x4k1 Y6k1 KZmed tangourPas encore d'évaluation
- Examen 2017Document3 pagesExamen 2017ethan cohenPas encore d'évaluation
- Autour de La Fonction Hyperbolique PDFDocument2 pagesAutour de La Fonction Hyperbolique PDFYassinePas encore d'évaluation
- Exos 2015 05 26Document7 pagesExos 2015 05 26s4bj6dwms8Pas encore d'évaluation
- Hec 2008 e 3Document4 pagesHec 2008 e 3maylisdevathairePas encore d'évaluation
- 1.vibrations Des PoutresDocument107 pages1.vibrations Des Poutrestouffaha moussaPas encore d'évaluation
- MathDocument8 pagesMathalaskaPas encore d'évaluation
- Serie 1 Modes de Convergence Et Theoreme Limites 2021 2022Document3 pagesSerie 1 Modes de Convergence Et Theoreme Limites 2021 2022Amine GougamPas encore d'évaluation
- Banque CCP 2018 ProbasDocument6 pagesBanque CCP 2018 ProbasMr DeePas encore d'évaluation
- Hec 2012 eDocument4 pagesHec 2012 emaylisdevathairePas encore d'évaluation
- Mon TravailDocument4 pagesMon TravailChikov ÆminePas encore d'évaluation
- Concours Blanc 7Document4 pagesConcours Blanc 7Abena Bala Marc-LoïcPas encore d'évaluation
- E3a PSI 2005 - Epreuve B Dur Ee: 4 Heures Calculatrice InterditesDocument3 pagesE3a PSI 2005 - Epreuve B Dur Ee: 4 Heures Calculatrice Interditesapi-3762501Pas encore d'évaluation
- Concours Blanc 9Document5 pagesConcours Blanc 9Abena Bala Marc-LoïcPas encore d'évaluation
- Sujet MathèmatiqueDocument3 pagesSujet MathèmatiqueIbrahel AlexeyPas encore d'évaluation
- ds2022 12 10Document2 pagesds2022 12 10sweetinserenaPas encore d'évaluation
- Exos Estimation CorrectionDocument31 pagesExos Estimation CorrectionMano AgbodoPas encore d'évaluation
- TD Suites CorDocument15 pagesTD Suites CorYves AbrahamPas encore d'évaluation
- Series Numeriques ExercicesDocument2 pagesSeries Numeriques Exercicesالضحك حتى تصبح مضحكPas encore d'évaluation
- Exam1Math1,22 23Document2 pagesExam1Math1,22 23nadinerjaibi15Pas encore d'évaluation
- TD3Est Ponct2020Document4 pagesTD3Est Ponct2020Wael KhemakhemPas encore d'évaluation
- S3VFDocument3 pagesS3VFAYMANE JAMALPas encore d'évaluation
- K FoisDocument3 pagesK FoisAYMANE JAMALPas encore d'évaluation
- CS3Document5 pagesCS3AYMANE JAMALPas encore d'évaluation
- S2VFDocument4 pagesS2VFAYMANE JAMALPas encore d'évaluation
- S1VFDocument5 pagesS1VFAYMANE JAMALPas encore d'évaluation
- CS1Document4 pagesCS1AYMANE JAMALPas encore d'évaluation
- Série 2 Analyse 5Document2 pagesSérie 2 Analyse 5AYMANE JAMALPas encore d'évaluation
- Série 3Document2 pagesSérie 3AYMANE JAMALPas encore d'évaluation
- Séance 28-12-20Document37 pagesSéance 28-12-20AYMANE JAMALPas encore d'évaluation
- Série 1Document2 pagesSérie 1AYMANE JAMALPas encore d'évaluation
- Séance 21-12-20Document28 pagesSéance 21-12-20AYMANE JAMALPas encore d'évaluation
- Série 2-Partie 2Document3 pagesSérie 2-Partie 2AYMANE JAMALPas encore d'évaluation
- Séance 21-12-20Document28 pagesSéance 21-12-20AYMANE JAMALPas encore d'évaluation
- TD Dualité 2021Document2 pagesTD Dualité 2021AYMANE JAMAL100% (1)
- Seance 2Document25 pagesSeance 2AYMANE JAMALPas encore d'évaluation
- Gauss SeidlDocument6 pagesGauss SeidlAYMANE JAMALPas encore d'évaluation
- Seance 4Document23 pagesSeance 4AYMANE JAMALPas encore d'évaluation
- Tsge Eff Juin 2017 Corrige Eff Juin 2017 Var 1 PDFDocument9 pagesTsge Eff Juin 2017 Corrige Eff Juin 2017 Var 1 PDFMed ChafikPas encore d'évaluation
- Seance 1Document25 pagesSeance 1AYMANE JAMALPas encore d'évaluation
- TD1 CorrDocument3 pagesTD1 CorrAYMANE JAMALPas encore d'évaluation
- CS3Document5 pagesCS3AYMANE JAMALPas encore d'évaluation
- Comptabilité Des Opérations Courantes TCE & TSGE...Document128 pagesComptabilité Des Opérations Courantes TCE & TSGE...boussader93% (15)
- 11 IntegralesAParametresDocument1 page11 IntegralesAParametresAYMANE JAMALPas encore d'évaluation
- DifférentielDocument115 pagesDifférentielLeRoiSoleilPas encore d'évaluation
- Exercices de La Semaine 16-03-20Document1 pageExercices de La Semaine 16-03-20AYMANE JAMALPas encore d'évaluation
- 23 IntegralesCurvilignesMultiplesDocument2 pages23 IntegralesCurvilignesMultiplesait tizi aichaPas encore d'évaluation
- Corrigé Du Contrôle Mécanique Des Solides SMA4 P2021Document11 pagesCorrigé Du Contrôle Mécanique Des Solides SMA4 P2021AYMANE JAMALPas encore d'évaluation
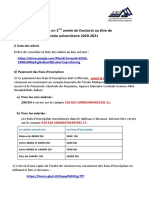
- Liste Admis en 1ere Annee de Doctorat STI 2020-2021Document1 pageListe Admis en 1ere Annee de Doctorat STI 2020-2021AYMANE JAMALPas encore d'évaluation
- Corrigé1-DEVOIR2-Analyse 6 12-05Document5 pagesCorrigé1-DEVOIR2-Analyse 6 12-05AYMANE JAMALPas encore d'évaluation
- Les Classiques de La ReductionDocument27 pagesLes Classiques de La ReductionAYMANE JAMAL100% (1)
- Cancer EstomacDocument90 pagesCancer Estomacblk fatimaPas encore d'évaluation
- Cancer RadiothérapieDocument218 pagesCancer RadiothérapieSaber KammounPas encore d'évaluation
- Tumeurs de La Glande ParotideDocument46 pagesTumeurs de La Glande Parotideammar eid100% (1)
- Rhabdomyosarcomes OrbitairesDocument4 pagesRhabdomyosarcomes OrbitairesSebti BenhaddaPas encore d'évaluation
- Angiogenèse Et MorphogenèseDocument9 pagesAngiogenèse Et MorphogenèseMordjPas encore d'évaluation
- ADP Cervico-Faciales Cancéreuses, Curettage GanglionnaireDocument43 pagesADP Cervico-Faciales Cancéreuses, Curettage GanglionnairePaul jrPas encore d'évaluation
- KC ColonDocument34 pagesKC ColonTewfik TGrPas encore d'évaluation
- Cas Clinique Hiba Ben AlayaDocument34 pagesCas Clinique Hiba Ben AlayaБЕНАЛАИА ХИБАPas encore d'évaluation
- Le Cancer Du FoieDocument48 pagesLe Cancer Du FoieAna Maria100% (1)
- Tumeurs Du Cerveau - 2010 PDFDocument47 pagesTumeurs Du Cerveau - 2010 PDFAndra Dăogaru-CrețanuPas encore d'évaluation
- Acturi Generalitati FRDocument121 pagesActuri Generalitati FRCamelia CamePas encore d'évaluation
- Tumeur OvariènneDocument70 pagesTumeur OvariènneSambiani JulienPas encore d'évaluation
- Item 306 - Cancer Broncho-Pulmonaire - V2 - 0Document4 pagesItem 306 - Cancer Broncho-Pulmonaire - V2 - 0Fanny NicolasPas encore d'évaluation
- Brochure ProstateDocument46 pagesBrochure ProstatebelhadjPas encore d'évaluation
- DUCOURNAU Alexia K5 18-22 UE28Document122 pagesDUCOURNAU Alexia K5 18-22 UE28Rim BenguenabPas encore d'évaluation
- French2as Project Cancer Sein PDFDocument6 pagesFrench2as Project Cancer Sein PDFInes MostefaouiPas encore d'évaluation
- Tumeurs OsseusesDocument61 pagesTumeurs OsseusesRomina BiancaPas encore d'évaluation
- Les Marqueurs Tumoraux OncoprofDocument7 pagesLes Marqueurs Tumoraux OncoprofaaPas encore d'évaluation
- Les Carcinomes de La Muqueuse Buccale Cours 5è 2021 22 PR BOUADAM.FDocument12 pagesLes Carcinomes de La Muqueuse Buccale Cours 5è 2021 22 PR BOUADAM.Fdyn chiPas encore d'évaluation
- Cancer Du Rein de LDocument3 pagesCancer Du Rein de LchinarPas encore d'évaluation
- Masses Cervicales - Complement A L - ED - A Lire Car CA Resume La Reference Et Couvre Les ObjectifsDocument23 pagesMasses Cervicales - Complement A L - ED - A Lire Car CA Resume La Reference Et Couvre Les ObjectifsGeorges BakhosPas encore d'évaluation
- Demo Guide de Radiologie Pour L EtudiantDocument34 pagesDemo Guide de Radiologie Pour L EtudiantAbix8433% (3)
- Hassan Sarah 2018 Ed414Document253 pagesHassan Sarah 2018 Ed414shivaPas encore d'évaluation
- Système de Planification de Traitement: GTV, CTVDocument9 pagesSystème de Planification de Traitement: GTV, CTVhajooooPas encore d'évaluation
- 16-Cancer Bronchique PrimitifDocument9 pages16-Cancer Bronchique Primitifrose moonPas encore d'évaluation
- 09-Nodule Splénique GERMAD PDFDocument110 pages09-Nodule Splénique GERMAD PDFMayssa YazbekPas encore d'évaluation
- TC Rcmi Col Uterus VD 2015-03-09 10-26-33 857Document34 pagesTC Rcmi Col Uterus VD 2015-03-09 10-26-33 857hindePas encore d'évaluation
- La Dissemination CancereuseDocument19 pagesLa Dissemination CancereuseSerigne Sohibou GayePas encore d'évaluation
- Chirurgie Oculaire Sous Les Climats Chauds 10Document10 pagesChirurgie Oculaire Sous Les Climats Chauds 10Viergelene PercinePas encore d'évaluation
- Dr. Toumi Nozha: Ecole Supérieure Des Science Et Techniques de La Santé de SfaxDocument36 pagesDr. Toumi Nozha: Ecole Supérieure Des Science Et Techniques de La Santé de SfaxAhmed Ben mansourPas encore d'évaluation
- Théorie relative de la musique: Maîtriser le mouvement par la logique des intervallesD'EverandThéorie relative de la musique: Maîtriser le mouvement par la logique des intervallesÉvaluation : 4 sur 5 étoiles4/5 (1)
- Physique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresD'EverandPhysique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresÉvaluation : 5 sur 5 étoiles5/5 (2)
- L'Ombre à l'Univers: La structure des particules élémentaires XIIfD'EverandL'Ombre à l'Univers: La structure des particules élémentaires XIIfPas encore d'évaluation
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsD'EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Mathématiques et Mathématiciens Pensées et CuriositésD'EverandMathématiques et Mathématiciens Pensées et CuriositésÉvaluation : 4.5 sur 5 étoiles4.5/5 (5)
- Les LES TRUCS MATHEMATIQUES AU PRIMAIRE: et si on leur donnait du sens!D'EverandLes LES TRUCS MATHEMATIQUES AU PRIMAIRE: et si on leur donnait du sens!Évaluation : 2 sur 5 étoiles2/5 (1)
- La pensée dirigée: Traité sur le raisonnement et les logiquesD'EverandLa pensée dirigée: Traité sur le raisonnement et les logiquesÉvaluation : 5 sur 5 étoiles5/5 (2)
- Les 10 Secrets pour une Vie Plus Heureuse avec la Maladie de ParkinsonD'EverandLes 10 Secrets pour une Vie Plus Heureuse avec la Maladie de ParkinsonPas encore d'évaluation
- Historique et description des procédés du daguerréotype et du diorama: Essai historique sur les sciences et techniquesD'EverandHistorique et description des procédés du daguerréotype et du diorama: Essai historique sur les sciences et techniquesPas encore d'évaluation
- Voyager à Travers les Mondes Parallèles pour Atteindre vos RêvesD'EverandVoyager à Travers les Mondes Parallèles pour Atteindre vos RêvesÉvaluation : 4 sur 5 étoiles4/5 (11)
- Sur les fondements de la théorie des ensembles transfinisD'EverandSur les fondements de la théorie des ensembles transfinisPas encore d'évaluation
- L'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.D'EverandL'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.Pas encore d'évaluation
- Le must bilingue™ du lycéen Vol. 2 - les maths en anglaisD'EverandLe must bilingue™ du lycéen Vol. 2 - les maths en anglaisPas encore d'évaluation
- Saturne: Les Grands Articles d'UniversalisD'EverandSaturne: Les Grands Articles d'UniversalisPas encore d'évaluation
- Signe pour le Saint Graal? Énergie infinie avec des possibilités infinies! Mesurer avec l’antenne de Lecher à Carnac et en Bretagne en FranceD'EverandSigne pour le Saint Graal? Énergie infinie avec des possibilités infinies! Mesurer avec l’antenne de Lecher à Carnac et en Bretagne en FrancePas encore d'évaluation
- Enjeux contemporains de l'éducation scientifique et technologiqueD'EverandEnjeux contemporains de l'éducation scientifique et technologiqueAbdelkrim HasniPas encore d'évaluation
- Guide complet de la Numérologie: Édition 30e anniversaireD'EverandGuide complet de la Numérologie: Édition 30e anniversaireÉvaluation : 4 sur 5 étoiles4/5 (1)