Vous aimerez peut-être aussi
- Feuille Exercices 9Document3 pagesFeuille Exercices 9Omar KessabPas encore d'évaluation
- EDP Ch1Document15 pagesEDP Ch1azertyPas encore d'évaluation
- PSH A7Document17 pagesPSH A7jamal kamalPas encore d'évaluation
- CoursDocument32 pagesCoursfrank sopPas encore d'évaluation
- Série 6Document2 pagesSérie 6Rayleight SilversPas encore d'évaluation
- Slides Form VarDocument48 pagesSlides Form VarMohcine RouessiPas encore d'évaluation
- MAT311 Slides9 X14Document49 pagesMAT311 Slides9 X14Mohamed EL BERKAOUIPas encore d'évaluation
- PC10 CorrectionDocument5 pagesPC10 Correction段文博Pas encore d'évaluation
- Exam2-2012 2Document2 pagesExam2-2012 2sarina.20001107Pas encore d'évaluation
- Chap IDocument5 pagesChap IAzouagh AnasPas encore d'évaluation
- Devoir 1Document4 pagesDevoir 1mouna.baboyaPas encore d'évaluation
- Cours HilbertDocument5 pagesCours HilbertWand Erer100% (1)
- RFS1 L3 2018-2019Document1 pageRFS1 L3 2018-2019Nadia SahraouiPas encore d'évaluation
- EX16Document1 pageEX16Meriam KooliPas encore d'évaluation
- Theoreme CalderonDocument2 pagesTheoreme CalderonghaithPas encore d'évaluation
- TD 5Document3 pagesTD 5zizou SaadaPas encore d'évaluation
- Méthodes Variationnelles Appliquées À La ModélisationDocument26 pagesMéthodes Variationnelles Appliquées À La ModélisationHenka AmirPas encore d'évaluation
- Chapitre 1 Transformée de FourierDocument12 pagesChapitre 1 Transformée de FourierSabri MahmoudPas encore d'évaluation
- TD2 CorDocument3 pagesTD2 Corali BourenanePas encore d'évaluation
- UntitledDocument6 pagesUntitledali hPas encore d'évaluation
- Efs1 - L3 17-18Document1 pageEfs1 - L3 17-18Nadia SahraouiPas encore d'évaluation
- Efs1 - L3 17-18 PDFDocument1 pageEfs1 - L3 17-18 PDFNadia SahraouiPas encore d'évaluation
- MA201 Examen 10 11Document3 pagesMA201 Examen 10 11zizou SaadaPas encore d'évaluation
- Chap 2Document23 pagesChap 2toumping chrifoPas encore d'évaluation
- TD 1Document8 pagesTD 1Médina MbédiPas encore d'évaluation
- Examen de M Ethodes Num Eriques: Approximation D'un Probl' Eme D' Electrostatique 1DDocument12 pagesExamen de M Ethodes Num Eriques: Approximation D'un Probl' Eme D' Electrostatique 1DMahamat NourPas encore d'évaluation
- Sujet (Element Finis) - 6Document2 pagesSujet (Element Finis) - 6ADAMSPas encore d'évaluation
- Problèmes Aux Limites Généraux Du Type Elliptique Dégénéré: NorioDocument61 pagesProblèmes Aux Limites Généraux Du Type Elliptique Dégénéré: NorionicolaszPas encore d'évaluation
- Chapitre D 2017-2018Document14 pagesChapitre D 2017-2018Gabriel SiariPas encore d'évaluation
- Slides Esp Banach 2Document39 pagesSlides Esp Banach 2جلولي غوتيPas encore d'évaluation
- Chapitre 4 Formalisme Mathématique de La Mécanique QuantiqueDocument35 pagesChapitre 4 Formalisme Mathématique de La Mécanique QuantiqueETUSUPPas encore d'évaluation
- Msma721 2010 11Document2 pagesMsma721 2010 11Kader MilanoPas encore d'évaluation
- Problèmes VariationnelsDocument13 pagesProblèmes VariationnelsScribdPas encore d'évaluation
- Poly Calcul DiffDocument11 pagesPoly Calcul Diffmyo dadoPas encore d'évaluation
- Agreg 2000 Analyse ProbaDocument5 pagesAgreg 2000 Analyse ProbaAmin ZekriPas encore d'évaluation
- Partie 1 v2Document16 pagesPartie 1 v2Doudou KingPas encore d'évaluation
- Metropole GR V DV C Juin 1990Document4 pagesMetropole GR V DV C Juin 1990max moaiPas encore d'évaluation
- M1 Exercices Corriges PDFDocument15 pagesM1 Exercices Corriges PDFsamvip100% (1)
- CH.1-1.2 1Document6 pagesCH.1-1.2 1kherrouf YOUNESPas encore d'évaluation
- Cours de Théorie SpectraleDocument16 pagesCours de Théorie SpectralemoulayeelbechirmouhamedleminePas encore d'évaluation
- Exercices 8 Espaces de Hilbert.Document4 pagesExercices 8 Espaces de Hilbert.jamal kamalPas encore d'évaluation
- Feuille9 Matheco - 2021 2022Document4 pagesFeuille9 Matheco - 2021 2022Samy YPas encore d'évaluation
- Resolution Numerique Des Equations Aux Derivees PartiellesDocument22 pagesResolution Numerique Des Equations Aux Derivees PartiellesLyna Meriem LAZLAOUIPas encore d'évaluation
- Liste 27 Théorème de BijectionDocument2 pagesListe 27 Théorème de BijectionAkpo ArmandPas encore d'évaluation
- Integration PDFDocument45 pagesIntegration PDFPascalin Tiam KapenPas encore d'évaluation
- Envoi2 34Document54 pagesEnvoi2 34Madjour BilelPas encore d'évaluation
- 209Document4 pages209mohamedPas encore d'évaluation
- 2 Espaces SobolevDocument16 pages2 Espaces SobolevHamza ByadPas encore d'évaluation
- Universit e Pierre Et Marie Curie Master 1, 4M025 Ann Ee 2014-2015 Calcul Des Variations: Outils Et M EthodesDocument3 pagesUniversit e Pierre Et Marie Curie Master 1, 4M025 Ann Ee 2014-2015 Calcul Des Variations: Outils Et M EthodesBatchainé Roger Le NotablePas encore d'évaluation
- DM1AFDocument3 pagesDM1AFJacques AdjoyiPas encore d'évaluation
- Télécharger Série N°1 Exercices Avec Corrigés de Module ANALYSE 5 (Fonctions de Plusieurs Variables) SMIA S3 PDFDocument6 pagesTélécharger Série N°1 Exercices Avec Corrigés de Module ANALYSE 5 (Fonctions de Plusieurs Variables) SMIA S3 PDFEdouard Mvogo BileguePas encore d'évaluation
- Examen-Analyse Fonctionnelle03-06-2013Document2 pagesExamen-Analyse Fonctionnelle03-06-2013Akpo ArmandPas encore d'évaluation
- Chap5, Sol-RenormDocument38 pagesChap5, Sol-RenormAmoud MimounePas encore d'évaluation
- ENSAF1920 Feuille 7Document2 pagesENSAF1920 Feuille 7rachidPas encore d'évaluation
- Part I El 27102022Document2 pagesPart I El 27102022Thomas SALAÜNPas encore d'évaluation
- Tp1 2017Document4 pagesTp1 2017HOUSSAME NAIMPas encore d'évaluation
- Corriges 2021 06Document12 pagesCorriges 2021 06Christopher TruongPas encore d'évaluation
- Chapitre E 2017-2018Document6 pagesChapitre E 2017-2018Gabriel SiariPas encore d'évaluation
- Lax Milg PDFDocument61 pagesLax Milg PDFSmail MlgPas encore d'évaluation
- Fonctions de Plusieurs Variables Et Applications Pour L - IngénieurDocument113 pagesFonctions de Plusieurs Variables Et Applications Pour L - IngénieurImene TarakliPas encore d'évaluation
- CH Courbes PDFDocument33 pagesCH Courbes PDFTahiri MehdiPas encore d'évaluation
- Vib Partiel 01 05 PDFDocument1 pageVib Partiel 01 05 PDFtetiartPas encore d'évaluation
- Rcver AiDocument146 pagesRcver AiNdaEtudiant JeanPas encore d'évaluation
- Cours MefDocument77 pagesCours MefToyePas encore d'évaluation
- Deuxvar PDFDocument24 pagesDeuxvar PDFABDELKADERPas encore d'évaluation
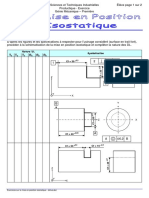
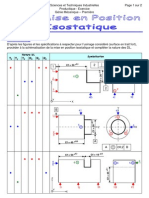
- Exercices Sur La Mise en Position IsostatiqueDocument2 pagesExercices Sur La Mise en Position IsostatiqueHamzik Ghass BaPas encore d'évaluation
- Exercices Sur La Mise en Position Isostatique - ProfDocument2 pagesExercices Sur La Mise en Position Isostatique - ProfNedrosat93% (61)
- FP2 2Document3 pagesFP2 2Hamzik Ghass BaPas encore d'évaluation
- Generalites de L'injection EssenceDocument53 pagesGeneralites de L'injection Essencenearl100% (1)
- Evolution DieselDocument6 pagesEvolution DieselHamzik Ghass BaPas encore d'évaluation
- 8 - Le RefroidissementDocument10 pages8 - Le Refroidissementnico-carroueePas encore d'évaluation
- Etude Fonctionnelle VehiculeDocument4 pagesEtude Fonctionnelle Vehiculeibrahim rabbajPas encore d'évaluation
- Feux TricoloresDocument2 pagesFeux TricoloresHamzik Ghass BaPas encore d'évaluation
- L Entretien Du Moteur Diesel 01 PDFDocument37 pagesL Entretien Du Moteur Diesel 01 PDFكمال عابدPas encore d'évaluation
- Graissage LubrificationDocument10 pagesGraissage LubrificationRosa100% (3)
- Injection-GESTION MOTEUR ESSENCE ProfsDocument30 pagesInjection-GESTION MOTEUR ESSENCE ProfsHamzik Ghass Ba100% (1)
- Les Caractéristiques Moteur-PDocument11 pagesLes Caractéristiques Moteur-PHamzik Ghass Ba100% (1)
- TD Electron I Quel 2Document135 pagesTD Electron I Quel 2HaitamElbathaoui100% (3)
- Cycle 4 Temps - Essence Et DieselDocument1 pageCycle 4 Temps - Essence Et DieselBa Hamzik HPPas encore d'évaluation
- Cycle 4 Temps - Essence Et DieselDocument1 pageCycle 4 Temps - Essence Et DieselBa Hamzik HPPas encore d'évaluation
- Evolution DieselDocument6 pagesEvolution DieselHamzik Ghass BaPas encore d'évaluation
- 1 Presentation Du Common Rail.: MOT MSRDocument13 pages1 Presentation Du Common Rail.: MOT MSRBa Hamzik HPPas encore d'évaluation
- Calage Courroie DedistributionCitroenC3 TU5JPL4Document36 pagesCalage Courroie DedistributionCitroenC3 TU5JPL4Hamzik Ghass BaPas encore d'évaluation
- AbaqusDocument124 pagesAbaqusNajat Bouzrourou97% (30)
- Code - Aster: Eléments IsoparamétriquesDocument23 pagesCode - Aster: Eléments IsoparamétriquesFongho Eric SinclairPas encore d'évaluation
- Méthode Des Éléments FinisDocument6 pagesMéthode Des Éléments FinisEl Aouali AymanPas encore d'évaluation
- Méthode Des Eléments Finis: Exercice 1Document3 pagesMéthode Des Eléments Finis: Exercice 1abdesslem0jarrayPas encore d'évaluation
- These Emboutissage IncrémentalDocument147 pagesThese Emboutissage IncrémentalMoslem ZariatPas encore d'évaluation
- Cours2 MEFDocument37 pagesCours2 MEFYoni AiméPas encore d'évaluation
- Modelisation Numerique Sous MATLAB PDFDocument12 pagesModelisation Numerique Sous MATLAB PDFhana ti100% (1)
- Cours Ef B ZouariDocument70 pagesCours Ef B ZouariAîman ZribiPas encore d'évaluation
- Slides Cours Dy Nami Que Chap 6Document43 pagesSlides Cours Dy Nami Que Chap 6Lâm Quốc MinhPas encore d'évaluation
- Conclusion GénéralDocument2 pagesConclusion GénéralAbdelali SolPas encore d'évaluation
- tcvn93522012906946 2447Document297 pagestcvn93522012906946 2447Viet Anh PhamPas encore d'évaluation
- Support de Cours Sap2000 Version 07 - 2006Document17 pagesSupport de Cours Sap2000 Version 07 - 2006Amine Ahmed100% (6)
- Cours Genie MecaniqueDocument12 pagesCours Genie MecaniqueMohamed BelhassenPas encore d'évaluation
- MEF Exposé 3Document21 pagesMEF Exposé 3TOVIHO SessinouPas encore d'évaluation
- Tran Adhérence Acier Béton À Chaud ENPC Paris Est CERIBDocument175 pagesTran Adhérence Acier Béton À Chaud ENPC Paris Est CERIBDuong Do NgocPas encore d'évaluation
- Arche - Melody 2015 - Guide UtilisateurDocument164 pagesArche - Melody 2015 - Guide UtilisateurAli MersniPas encore d'évaluation
- Comportement Post Pic Du BétonDocument180 pagesComportement Post Pic Du BétonsalifsyPas encore d'évaluation
- Enonces TD 2012Document6 pagesEnonces TD 2012moemen benhendaPas encore d'évaluation
- polyNS2017 18Document83 pagespolyNS2017 18Hajar MaqrotePas encore d'évaluation
- Méthode Des Éléments Finis M1 GC KADA AbdelhakDocument136 pagesMéthode Des Éléments Finis M1 GC KADA Abdelhakgoudfay100% (1)
- Chap 3Document14 pagesChap 3fouad bouzahrPas encore d'évaluation
- TP FreeFemDocument12 pagesTP FreeFemAS asPas encore d'évaluation
- Présentation Cours Modélisation 2023 V2Document181 pagesPrésentation Cours Modélisation 2023 V2thomas yapiPas encore d'évaluation
- CTICM Poutre Avec Une Ouverture PDFDocument21 pagesCTICM Poutre Avec Une Ouverture PDFyacino30Pas encore d'évaluation
- Note de Calcul Pour Citerne de Transport D'hydrocarbures: Selon l'EN 13094Document17 pagesNote de Calcul Pour Citerne de Transport D'hydrocarbures: Selon l'EN 13094Oussama SennoussiPas encore d'évaluation
- Boss Ens 01Document151 pagesBoss Ens 01KaderfirdawsPas encore d'évaluation
- Est FBSDocument73 pagesEst FBSda3cf255bdPas encore d'évaluation
- Corrige de Exo1 - Serie 2 - Calcul Des Structures - 2020 - 2021Document45 pagesCorrige de Exo1 - Serie 2 - Calcul Des Structures - 2020 - 2021somaya ehPas encore d'évaluation
- Travaux Pratique de Mécanique Des Solides DéformablesDocument21 pagesTravaux Pratique de Mécanique Des Solides DéformablesMehdi Chams Eddine FarahPas encore d'évaluation
- Rapport - Four G5 - 20-06-2023Document43 pagesRapport - Four G5 - 20-06-2023mohamed faresPas encore d'évaluation