Vous aimerez peut-être aussi
- c1 Cours Liaisons MecaniquesDocument4 pagesc1 Cours Liaisons Mecaniqueshsn frkPas encore d'évaluation
- Chapitre 2 - Liaison Et Assemblage MécaniquesDocument11 pagesChapitre 2 - Liaison Et Assemblage MécaniquesFréjus abimbolaPas encore d'évaluation
- 1.liaisons Mécaniques Et Schéma CinématiqueDocument27 pages1.liaisons Mécaniques Et Schéma CinématiqueSLIMANI FOUADPas encore d'évaluation
- Composantes Des Competences Disciplinaires: Theme: Typologie Des AssemblagesDocument12 pagesComposantes Des Competences Disciplinaires: Theme: Typologie Des AssemblagesweslatisfirPas encore d'évaluation
- Composantes Des Competences Disciplinaires: Theme: Typologie Des AssemblagesDocument12 pagesComposantes Des Competences Disciplinaires: Theme: Typologie Des AssemblagesntayoubPas encore d'évaluation
- Modélisation Géométrique de LiaisonsDocument37 pagesModélisation Géométrique de LiaisonsAyoüb Sou UadPas encore d'évaluation
- Modélisation Des Systèmes de SolidesDocument17 pagesModélisation Des Systèmes de SolidesAbdelali YacoubiPas encore d'évaluation
- Modélisation Géométrique Des LiaisonsDocument12 pagesModélisation Géométrique Des LiaisonsKarima HamdanPas encore d'évaluation
- Diapos MMC Sept 2012Document153 pagesDiapos MMC Sept 2012mathlouthi safaPas encore d'évaluation
- MODELISATION CINEMATIQUE COURS SI PC 2018-2019 (Él.)Document10 pagesMODELISATION CINEMATIQUE COURS SI PC 2018-2019 (Él.)Andreas NGASTE100% (1)
- Chap4 LAISONS MECANIQUESDocument12 pagesChap4 LAISONS MECANIQUESSimplice AssemienPas encore d'évaluation
- 12 - Modélisation Cinématique Des MécanismesDocument25 pages12 - Modélisation Cinématique Des MécanismesManal El Matmour M'hairPas encore d'évaluation
- 1 Mca TSTPDocument6 pages1 Mca TSTPamoula87Pas encore d'évaluation
- Livre-RDM - ExtraDocument125 pagesLivre-RDM - ExtralimmoudPas encore d'évaluation
- 1a9 Mca TSTPDocument87 pages1a9 Mca TSTPMIKAEL HENRIOTPas encore d'évaluation
- CoursDocument61 pagesCoursBen Aissa ChokriPas encore d'évaluation
- Modelisation CinematiqueDocument16 pagesModelisation CinematiqueAnonymous tNIpOVPyPas encore d'évaluation
- Modélisation Cinématique Des MécanismesDocument8 pagesModélisation Cinématique Des MécanismesConception & Fabrication MécaniquePas encore d'évaluation
- ÉlémentDocument8 pagesÉlémentAnonymous jmFTK5TPas encore d'évaluation
- Théorie Des MécanismesDocument5 pagesThéorie Des MécanismesMohamed Slim KhPas encore d'évaluation
- Correction-cahier-LES LIAISONS MÉCANIQUES - 2016-ProfDocument9 pagesCorrection-cahier-LES LIAISONS MÉCANIQUES - 2016-ProfAbdoul Karim MouhamedPas encore d'évaluation
- Chap3 Hyperstatisme Et Mobilité Des MécanismesDocument21 pagesChap3 Hyperstatisme Et Mobilité Des Mécanismesmamadou diopPas encore d'évaluation
- C1 Modelisation Des MecanismesDocument6 pagesC1 Modelisation Des MecanismesOMAR ENNAJIPas encore d'évaluation
- Chapitre 2Document7 pagesChapitre 2yousfi jeziaPas encore d'évaluation
- Modelisation Mécanismes 2020Document22 pagesModelisation Mécanismes 2020Mathis DintrichPas encore d'évaluation
- Cours Éléments de Construction 2020-21Document84 pagesCours Éléments de Construction 2020-21Hassan BoufkerPas encore d'évaluation
- MMC 1 LagrangeDocument34 pagesMMC 1 LagrangegfedshqdsPas encore d'évaluation
- 2 Chapitre2 Modelisation Des MécanismesDocument9 pages2 Chapitre2 Modelisation Des Mécanismesmohammed belhadj kelkal100% (1)
- Schéma CinématiqueDocument41 pagesSchéma CinématiquesadikiPas encore d'évaluation
- Schéma CinématiqueDocument48 pagesSchéma CinématiqueomatrPas encore d'évaluation
- Chap 1 Liaisons ProfDocument4 pagesChap 1 Liaisons Profفدوى غانيPas encore d'évaluation
- Chap1 Tourki2013Document28 pagesChap1 Tourki2013MD HM BCPas encore d'évaluation
- Theorie Des Mecanismes-CoursDocument14 pagesTheorie Des Mecanismes-CoursAli ArroudjPas encore d'évaluation
- TP Mecanisme Diapos Avec SolutionDocument19 pagesTP Mecanisme Diapos Avec SolutionSamara CherifPas encore d'évaluation
- Chap2 LIAISONS MECANIQUESDocument13 pagesChap2 LIAISONS MECANIQUESSoro AchillePas encore d'évaluation
- Préparation Concours Technologues Mécanique2Document51 pagesPréparation Concours Technologues Mécanique2Amina DinariPas encore d'évaluation
- Théorie de MécanismeDocument10 pagesThéorie de Mécanismemejri merinPas encore d'évaluation
- Chapitre1 - Liaisons MécaniquesDocument9 pagesChapitre1 - Liaisons MécaniquesZakaria BaidPas encore d'évaluation
- Chapitre1 - Liaisons MécaniquesDocument9 pagesChapitre1 - Liaisons MécaniquesZakaria BaidPas encore d'évaluation
- Chapitre 2Document10 pagesChapitre 2skaachPas encore d'évaluation
- Actions Transmissibles Dans Les Liaisons - Elements de CorrectionDocument10 pagesActions Transmissibles Dans Les Liaisons - Elements de CorrectionMartin MaurerPas encore d'évaluation
- Chap07 RSF 2023Document16 pagesChap07 RSF 2023dawoud.kenzariPas encore d'évaluation
- (FS01) Intro Aux Liaisons Meca PDFDocument3 pages(FS01) Intro Aux Liaisons Meca PDFGuy YgalPas encore d'évaluation
- Liaisons 2Document8 pagesLiaisons 2BIOS_012100% (1)
- Chap 1. Modelisation Des LiaisonsDocument5 pagesChap 1. Modelisation Des LiaisonsIbrahim ManganePas encore d'évaluation
- Mec2 Chaines de SolidesDocument5 pagesMec2 Chaines de SolidesWasfi ZakariaPas encore d'évaluation
- Caracterisation Des LiaisonsDocument23 pagesCaracterisation Des LiaisonsGuillaume PiquetPas encore d'évaluation
- Cours RDM 2023-24Document100 pagesCours RDM 2023-24mennanesalaheddinePas encore d'évaluation
- MLM TC1Document10 pagesMLM TC1GamatekPas encore d'évaluation
- Representation Des ProduitsDocument12 pagesRepresentation Des ProduitsHAJAR HAFIDPas encore d'évaluation
- Rapport YassineDocument21 pagesRapport YassinehamzajadiPas encore d'évaluation
- Ploycopié TP OV 2020-2021Document39 pagesPloycopié TP OV 2020-2021riadPas encore d'évaluation
- Ploycopié TP OV 2020-2021Document39 pagesPloycopié TP OV 2020-2021nemer kheireddinePas encore d'évaluation
- Chapitre 2 MODELISATION DES LIAISONSDocument15 pagesChapitre 2 MODELISATION DES LIAISONSChaker Chaoual100% (1)
- ANALYSE de MécanismeDocument53 pagesANALYSE de MécanismeAchref Sallami100% (1)
- Cours CT 1 Schematisation CinematiqueDocument5 pagesCours CT 1 Schematisation CinematiquePascal PonzoniPas encore d'évaluation
- Livre RDM ExtraDocument125 pagesLivre RDM ExtraGhassane Said OuazriPas encore d'évaluation
- Relativité restreinte, mécanique quantique et relativité générale: Base physique et mathématique de la relativité restreinte et générale et de la mécanique quantiqueD'EverandRelativité restreinte, mécanique quantique et relativité générale: Base physique et mathématique de la relativité restreinte et générale et de la mécanique quantiquePas encore d'évaluation
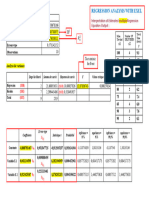
- Multiple REGRESSION WITH EXELDocument1 pageMultiple REGRESSION WITH EXELWa LidPas encore d'évaluation
- Fascicule MathsDocument33 pagesFascicule MathsFatima Diop100% (1)
- Le RaisonnementDocument22 pagesLe RaisonnementMassePas encore d'évaluation
- Cours TDM Physique Appliquée Et Technologie Cours M SOUALMIDocument17 pagesCours TDM Physique Appliquée Et Technologie Cours M SOUALMINoureddine Benarifa100% (5)
- Zooms Mathématiques Appliquées À La GestionDocument296 pagesZooms Mathématiques Appliquées À La Gestionnekini131085100% (1)
- TD Racine Carree Et Theoreme de Thales 2022-2023Document6 pagesTD Racine Carree Et Theoreme de Thales 2022-2023aminambacke27Pas encore d'évaluation
- DC 16Document128 pagesDC 16Ha DjerPas encore d'évaluation
- Cours D'analyse Numerique PDFDocument56 pagesCours D'analyse Numerique PDFsofyann170% (2)
- Cercle TangentDocument5 pagesCercle TangentAimé IkoyobPas encore d'évaluation
- EXERCICES Espaces Vectoriels PDFDocument13 pagesEXERCICES Espaces Vectoriels PDFMouna BzPas encore d'évaluation
- Série 4 Modèle MultipleDocument3 pagesSérie 4 Modèle MultipleD IM100% (1)
- Électricité La BobineDocument3 pagesÉlectricité La BobineDelamouPas encore d'évaluation
- TP Rép Tem 2eme OrdreDocument7 pagesTP Rép Tem 2eme OrdreMeriem AIT OUMEGHARPas encore d'évaluation
- TP3 C++Document4 pagesTP3 C++Hsen MacheyPas encore d'évaluation
- Calcul Tensorielpart3 - Tome1Document56 pagesCalcul Tensorielpart3 - Tome1Abdel-aziz Ahmat TimanPas encore d'évaluation
- Corrigé - Série N° 2 de T.D. de Probabilités 2021Document11 pagesCorrigé - Série N° 2 de T.D. de Probabilités 2021ullashjiPas encore d'évaluation
- Factorisation Et DeveloppementDocument1 pageFactorisation Et DeveloppementpfePas encore d'évaluation
- 3 Les EssaisDocument43 pages3 Les EssaisNada Riahi100% (1)
- Ressource Algorithme LevelingDocument22 pagesRessource Algorithme LevelingreghouachePas encore d'évaluation
- Corrige Geipi QCM 2006Document7 pagesCorrige Geipi QCM 2006la physique selon le programme FrançaisPas encore d'évaluation
- Correction Cc1Document7 pagesCorrection Cc1samPas encore d'évaluation
- Exam Modeles Pour Le Datamining 2015 2016Document5 pagesExam Modeles Pour Le Datamining 2015 2016ilyesPas encore d'évaluation
- Equations Aux Derivees PartiellesDocument32 pagesEquations Aux Derivees PartiellesMichael BassemelPas encore d'évaluation
- Eb 1 1110 2021-2022 86-17-24-28-30-26Document12 pagesEb 1 1110 2021-2022 86-17-24-28-30-26Pierrot Jules AMOUSSOUPas encore d'évaluation
- Continuité Et Limites - 191119025153 PDFDocument8 pagesContinuité Et Limites - 191119025153 PDFWilliam Ibrahim BambaPas encore d'évaluation
- Recherche Opérationnelle: Z.ZitoutDocument18 pagesRecherche Opérationnelle: Z.ZitoutZohra ZitoutPas encore d'évaluation
- Exercices GD - PointDocument5 pagesExercices GD - PointYosr Maiza100% (1)
- Chap 03 Proportions EvolutionsDocument4 pagesChap 03 Proportions EvolutionsJohan Faber0% (1)
- 8dfk1-Serie2 11 12Document2 pages8dfk1-Serie2 11 12Alpha Draxler BarryPas encore d'évaluation
- Symetrie AxialeDocument20 pagesSymetrie AxialeIbtissam NfissiPas encore d'évaluation