Vous aimerez peut-être aussi
- Presentation Leonova Infinity FrancaisDocument22 pagesPresentation Leonova Infinity FrancaisPaolo MokPas encore d'évaluation
- Exo 3 Serie 1Document30 pagesExo 3 Serie 1Zack MahmoudiPas encore d'évaluation
- TDS3147 Décembre 2013 C - FALCON Fiche Technique FRDocument18 pagesTDS3147 Décembre 2013 C - FALCON Fiche Technique FRnino16041973Pas encore d'évaluation
- VibrationsDocument150 pagesVibrationsnesrine dhaouadi100% (1)
- CHP 3 Analyse Vibratoire 2020Document52 pagesCHP 3 Analyse Vibratoire 2020Maram Sellami100% (1)
- 1 3 Cours Analyse VibratoireDocument11 pages1 3 Cours Analyse VibratoireSeif EddinePas encore d'évaluation
- Intro Analyse Vibrations Description Du CoursDocument1 pageIntro Analyse Vibrations Description Du CoursDODOHICHAMPas encore d'évaluation
- CCINP Notice 2021 06 MaiDocument27 pagesCCINP Notice 2021 06 MaiFf fPas encore d'évaluation
- 04 FR Surveillance MachinesDocument43 pages04 FR Surveillance MachinesbottiotherPas encore d'évaluation
- Chapitre 2 PDFDocument8 pagesChapitre 2 PDFChaouki MessasmaPas encore d'évaluation
- Bda 5 BeDocument4 pagesBda 5 BeMalek SghaierPas encore d'évaluation
- FiabilitéDocument65 pagesFiabilitéZin.YPas encore d'évaluation
- ASM - Chap4 Guidage Rotation Tech Roulements V01 - Etudiants PDFDocument60 pagesASM - Chap4 Guidage Rotation Tech Roulements V01 - Etudiants PDFAhmed GtariPas encore d'évaluation
- Surveillances Des MachinesDocument30 pagesSurveillances Des MachinesLahmarabderrahmanePas encore d'évaluation
- Presentation Turbo-Machines-Definitif Turbone À GazDocument65 pagesPresentation Turbo-Machines-Definitif Turbone À GazHamdi Mohamed100% (1)
- WEG WMO Manuel D Installation D Utilisation Et de Maintenance de Moteurs Electriques 50069265 Manuel French WebDocument56 pagesWEG WMO Manuel D Installation D Utilisation Et de Maintenance de Moteurs Electriques 50069265 Manuel French WebRafik MeksenPas encore d'évaluation
- Vibrations MaintenanceDocument19 pagesVibrations Maintenancenejmiddin boughattasPas encore d'évaluation
- Sections Documents-Pdagogiques Chapitre-8-Mesure Downloadfile File Les Capteurs - PDF Nocache 1289041293Document47 pagesSections Documents-Pdagogiques Chapitre-8-Mesure Downloadfile File Les Capteurs - PDF Nocache 1289041293EL Alaoui YoussefPas encore d'évaluation
- Exo 1 Serie 3Document11 pagesExo 1 Serie 3Zack MahmoudiPas encore d'évaluation
- Vibration Axiale de RoulementDocument8 pagesVibration Axiale de Roulementspectrum66Pas encore d'évaluation
- Acc6l6rombtres Pi0zo6lectriques Et Pr6amplificateursDocument164 pagesAcc6l6rombtres Pi0zo6lectriques Et Pr6amplificateursBogdan NeagoePas encore d'évaluation
- 04 FR Surveillance MachinesDocument85 pages04 FR Surveillance MachinesAminePas encore d'évaluation
- Etat Des Lieux Sodeci 4-11-08-21Document8 pagesEtat Des Lieux Sodeci 4-11-08-21Abdoul KamaraPas encore d'évaluation
- 2-Objectifs de TPDocument3 pages2-Objectifs de TPmn13hhPas encore d'évaluation
- Examen Rabi 2Document4 pagesExamen Rabi 2Øthmane HđPas encore d'évaluation
- Boughagha FouziDocument75 pagesBoughagha FouziamekhzoumiPas encore d'évaluation
- MM2001Document18 pagesMM2001souriPas encore d'évaluation
- Cha 4972Document136 pagesCha 4972Houcine Bendaoud100% (1)
- Dossier Tech Mouv VibratoireDocument52 pagesDossier Tech Mouv Vibratoireabdelwahab mahdhiPas encore d'évaluation
- Chaîne de Mesure Des VibrationsDocument8 pagesChaîne de Mesure Des VibrationsGhali FatimaPas encore d'évaluation
- Chapitrei AV1 2018Document51 pagesChapitrei AV1 2018YassineZklPas encore d'évaluation
- Contrôle EngrenagesDocument7 pagesContrôle EngrenagessahjPas encore d'évaluation
- Vibrations Experimentales - Traitement Du SignaleDocument79 pagesVibrations Experimentales - Traitement Du SignalebtkmouadPas encore d'évaluation
- Torsional Operational Deflection ShapesDocument43 pagesTorsional Operational Deflection ShapesWon-young SeoPas encore d'évaluation
- Vibgraph PDFDocument122 pagesVibgraph PDFKaiser46Li206Pas encore d'évaluation
- Introduction Aux VibrationsDocument31 pagesIntroduction Aux VibrationsHo Van ThanhPas encore d'évaluation
- Lubrification Cours2Document22 pagesLubrification Cours2ZAAIRA HAMZAPas encore d'évaluation
- Documentation Analyseur Mécanique Dynamique (DMA) - DMA1Document14 pagesDocumentation Analyseur Mécanique Dynamique (DMA) - DMA1Roxana Mihaela DinuPas encore d'évaluation
- 803 Capteur Pesage PDFDocument4 pages803 Capteur Pesage PDFFATIMA EZZAHRA ELAMRANI100% (1)
- 15 Maintenance Moteurs MersenDocument14 pages15 Maintenance Moteurs Mersenزايد الأطلسPas encore d'évaluation
- Chap1 Modélisation LagrangeDocument52 pagesChap1 Modélisation LagrangeHasibKaabiPas encore d'évaluation
- 1 Analyse VibratoireDocument11 pages1 Analyse VibratoireAnonymous LfeGI2hM50% (2)
- PDF DiagnosticDocument118 pagesPDF DiagnosticAyman IguerhzifenPas encore d'évaluation
- NDC VibrationDocument274 pagesNDC VibrationtoonsPas encore d'évaluation
- Analyse Vibratoire1Document8 pagesAnalyse Vibratoire1watsopPas encore d'évaluation
- B5570Document19 pagesB5570محمدلمين سيداحمدPas encore d'évaluation
- Implémentation EDGE Sur Réseau Tunisie TélécomDocument24 pagesImplémentation EDGE Sur Réseau Tunisie Télécomsani7Pas encore d'évaluation
- Analyse de Fourier de Vibrations Mecaniques D'une LameDocument16 pagesAnalyse de Fourier de Vibrations Mecaniques D'une LameaklamosPas encore d'évaluation
- Surveillance VibratoireDocument84 pagesSurveillance VibratoireNari MenePas encore d'évaluation
- Etude Des Principaux DéfautsDocument31 pagesEtude Des Principaux DéfautsKo Kito100% (1)
- DOC1102 Juillet 2012 B - VIB DBA (8) Manuel Utilisation FRDocument58 pagesDOC1102 Juillet 2012 B - VIB DBA (8) Manuel Utilisation FRMisael GuttmanPas encore d'évaluation
- Principes D - Électroacoustique Et Plannification PDFDocument102 pagesPrincipes D - Électroacoustique Et Plannification PDFmuratPas encore d'évaluation
- La Maintenance Conditionnel Par Mesure Et Analyse Vibratoire EdDocument107 pagesLa Maintenance Conditionnel Par Mesure Et Analyse Vibratoire EdfetniPas encore d'évaluation
- Catalogue Logiciels 2015Document31 pagesCatalogue Logiciels 2015Alexandre Le GrandPas encore d'évaluation
- BDE04 Analyse Vibratoire BalourdDocument16 pagesBDE04 Analyse Vibratoire Balourdblues1997100% (2)
- TP1 Vibration Mécanique AV FalconDocument21 pagesTP1 Vibration Mécanique AV FalconOmar BenadirPas encore d'évaluation
- Vibrations Des Arbres RotatifsDocument8 pagesVibrations Des Arbres Rotatifshicham-13100% (1)
- Analyse Modale de La VibrationDocument21 pagesAnalyse Modale de La VibrationmanalPas encore d'évaluation
- 01 Examen Rli Et Supervision Enset DoualaDocument4 pages01 Examen Rli Et Supervision Enset DoualaSamuel BanembPas encore d'évaluation
- Maintenance HGHDGJGHRTHTDocument1 pageMaintenance HGHDGJGHRTHTjabranePas encore d'évaluation
- Céramiques de Bâtiment - Carreaux Et Produits Sanitaires (CDocument2 pagesCéramiques de Bâtiment - Carreaux Et Produits Sanitaires (CjabranePas encore d'évaluation
- IV FeldbusDocument65 pagesIV FeldbusjabranePas encore d'évaluation
- Colles Et Adhésifs (C962)Document3 pagesColles Et Adhésifs (C962)jabranePas encore d'évaluation
- Défense Du Littoral (C4695)Document18 pagesDéfense Du Littoral (C4695)jabranePas encore d'évaluation
- Défense Du Littoral (C4695)Document18 pagesDéfense Du Littoral (C4695)jabranePas encore d'évaluation
- Maintenance Erteyyljhjkhljkhhyyutugdg ('È ('ÈkjDocument1 pageMaintenance Erteyyljhjkhljkhhyyutugdg ('È ('ÈkjjabranePas encore d'évaluation
- Calculs Commerciaux Ter-TceDocument99 pagesCalculs Commerciaux Ter-TceAziz Aouragh100% (1)
- Laminage À ChaudDocument24 pagesLaminage À ChaudjabranePas encore d'évaluation
- Article TPM Tribune IndustrieDocument5 pagesArticle TPM Tribune IndustrieAdnane KaananePas encore d'évaluation
- Document Unique Les Risques Lies A La Maintenance Avril 2011Document1 pageDocument Unique Les Risques Lies A La Maintenance Avril 2011jabranePas encore d'évaluation
- Fiche Reparation Variateur GV3000 - Bs2Document3 pagesFiche Reparation Variateur GV3000 - Bs2jabranePas encore d'évaluation
- La Gestion Des Stocks Un Cassetete Pour Les Responsables Maintenance Janvier 2012Document2 pagesLa Gestion Des Stocks Un Cassetete Pour Les Responsables Maintenance Janvier 2012jabranePas encore d'évaluation
- La Maintenance Au Coeur Des RisquesDocument11 pagesLa Maintenance Au Coeur Des RisquesjabranePas encore d'évaluation
- Exemples TrizDocument29 pagesExemples TrizhassankchPas encore d'évaluation
- Extraits Normes MaintDocument5 pagesExtraits Normes MaintjabranePas encore d'évaluation
- Fiche Reparation Variateur GV3000Document3 pagesFiche Reparation Variateur GV3000jabranePas encore d'évaluation
- Fiche de DA Batterie Radio PSADocument3 pagesFiche de DA Batterie Radio PSAjabranePas encore d'évaluation
- Fiche Reparation Debimetre Et AfficheurDocument3 pagesFiche Reparation Debimetre Et AfficheurjabranePas encore d'évaluation
- Fiche de DA Mois Ecran SupervisionDocument4 pagesFiche de DA Mois Ecran SupervisionjabranePas encore d'évaluation
- Fiche de DA Mois 1Document6 pagesFiche de DA Mois 1jabranePas encore d'évaluation
- Fiche de Demande D'achatDocument2 pagesFiche de Demande D'achatjabranePas encore d'évaluation
- Fiche de DA Mois 1 PresostatDocument4 pagesFiche de DA Mois 1 PresostatjabranePas encore d'évaluation
- Fiche Variateur Lenz - Panelle CAPTEUR PRESSIO HYDACDocument3 pagesFiche Variateur Lenz - Panelle CAPTEUR PRESSIO HYDACjabranePas encore d'évaluation
- Suivie L'achat Des PDRDocument5 pagesSuivie L'achat Des PDRjabranePas encore d'évaluation
- Fiche Variateur de VitesseDocument3 pagesFiche Variateur de VitessejabranePas encore d'évaluation
- Fiche de DA Batterie Radio PSADocument3 pagesFiche de DA Batterie Radio PSAjabranePas encore d'évaluation
- Suivi Et Etat Demandes D'achats Electrique Global 2014Document7 pagesSuivi Et Etat Demandes D'achats Electrique Global 2014jabranePas encore d'évaluation
- Fiche Variateur de Vitesse - 7.5KWDocument3 pagesFiche Variateur de Vitesse - 7.5KWjabranePas encore d'évaluation
- Fiche Variateur LenzDocument3 pagesFiche Variateur LenzjabranePas encore d'évaluation
- FDT III Signaux Emetteurs CanauxDocument36 pagesFDT III Signaux Emetteurs CanauxThomas LaurentPas encore d'évaluation
- Vocabulaire CouleurDocument3 pagesVocabulaire CouleurAna BluePas encore d'évaluation
- Chapitre 6Document38 pagesChapitre 6Perrinio KepseuPas encore d'évaluation
- French 3ap18 JJJHHHHJDocument2 pagesFrench 3ap18 JJJHHHHJFettaYousfiPas encore d'évaluation
- OptiqueDocument22 pagesOptiquejeanPas encore d'évaluation
- Racc Modules DI DO Modicon M340Document4 pagesRacc Modules DI DO Modicon M340catalinccPas encore d'évaluation
- Les CouleursDocument2 pagesLes CouleursCharlasie MumbondelaPas encore d'évaluation
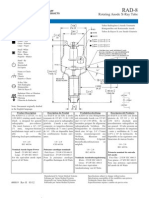
- X Ray Tube Insert Rad-08Document6 pagesX Ray Tube Insert Rad-08Pablo RosasPas encore d'évaluation
- Spectrophotométrie - Dilution 1 Dilution Et Facteur de Dilution. 1.1 Mode OpératoireDocument6 pagesSpectrophotométrie - Dilution 1 Dilution Et Facteur de Dilution. 1.1 Mode OpératoireHedi EnaceurPas encore d'évaluation
- CHAPITRE II - Diffracton Des Rayons XDocument16 pagesCHAPITRE II - Diffracton Des Rayons Xkgu yryrtyPas encore d'évaluation
- Atomistique & Liaisons Chimique Deug s1Document75 pagesAtomistique & Liaisons Chimique Deug s1almohaydi89% (38)
- Tapuscrit Le Magicien Des Couleurs Maternelle Cycle2Document8 pagesTapuscrit Le Magicien Des Couleurs Maternelle Cycle2Bassem LessouedPas encore d'évaluation
- Moussa RadhwaneDocument25 pagesMoussa Radhwaneسناء المقدسيPas encore d'évaluation
- Randriamanantsoaherinantenaina PC M2 13Document92 pagesRandriamanantsoaherinantenaina PC M2 13Franck-valaire Ngapa YaoPas encore d'évaluation
- Exercices RX CorrigésDocument4 pagesExercices RX CorrigésablearnPas encore d'évaluation
- Ts Annales Zero 2013 - Specifique Sujet 1Document15 pagesTs Annales Zero 2013 - Specifique Sujet 1mousse2010Pas encore d'évaluation
- Cours TD Rayonnement PDFDocument52 pagesCours TD Rayonnement PDFAmina Erradi50% (2)
- CH5-Activite 3-Spectres LumineuxDocument3 pagesCH5-Activite 3-Spectres LumineuxYnissPas encore d'évaluation
- Validation - 2 - Géné X - 3.0Document53 pagesValidation - 2 - Géné X - 3.0labakoum badr-eddinePas encore d'évaluation
- Lexique EclairageDocument17 pagesLexique EclairageHyacinthe KOSSIPas encore d'évaluation
- AnnexesDocument4 pagesAnnexesnounouNuPas encore d'évaluation
- PV Solar Cell Perovskites MaterialDocument108 pagesPV Solar Cell Perovskites MaterialHēm HicPas encore d'évaluation
- Boyer Regles CEM PCB v3Document16 pagesBoyer Regles CEM PCB v3thitanaPas encore d'évaluation
- Cours Télédéttction - El Harti PDFDocument142 pagesCours Télédéttction - El Harti PDFIbtiPas encore d'évaluation
- Msa15 - Edc15Document6 pagesMsa15 - Edc15ScribdTranslationsPas encore d'évaluation
- Chapitre 4 ETUDES EXPERIMENTALESDocument5 pagesChapitre 4 ETUDES EXPERIMENTALESZinou BourbiaPas encore d'évaluation
- Système Pneumatique / Schema Electrique: Client: Numéro de Machine: 400V 000000Document23 pagesSystème Pneumatique / Schema Electrique: Client: Numéro de Machine: 400V 000000Mehdi Ben AbdallahPas encore d'évaluation
- Manual 5.0635.09.24Document4 pagesManual 5.0635.09.24mbgprsmsPas encore d'évaluation
- Sensitométrie Chapitre 4lightDocument117 pagesSensitométrie Chapitre 4lightÁł ÃăPas encore d'évaluation
- C3a 010141Document2 pagesC3a 010141Yassine BerchilPas encore d'évaluation