Vous aimerez peut-être aussi
- Cinématique 2022Document51 pagesCinématique 2022said houmairiPas encore d'évaluation
- CNC 1987 MP PhysiqueDocument5 pagesCNC 1987 MP Physiqueanass grini100% (1)
- TD1 Mec Ana 2020 ÉnoncéDocument3 pagesTD1 Mec Ana 2020 ÉnoncéMeddour WassimPas encore d'évaluation
- Chap2 LIAISONS MECANIQUESDocument13 pagesChap2 LIAISONS MECANIQUESAdams SamassiPas encore d'évaluation
- TD 17 - Liaisons Équivalentes PDFDocument5 pagesTD 17 - Liaisons Équivalentes PDFAbdelhakPas encore d'évaluation
- Examen Statique Des Solides 2013Document7 pagesExamen Statique Des Solides 2013vinc giniPas encore d'évaluation
- CinématiqueDocument2 pagesCinématiqueJonePas encore d'évaluation
- CI06 TD15 Corrigé - Déterminer La Loi de Commande en Effort D - Un Mécanisme À L - ÉquilibreDocument12 pagesCI06 TD15 Corrigé - Déterminer La Loi de Commande en Effort D - Un Mécanisme À L - ÉquilibreKhaled Jberi100% (1)
- TD 20 - Loi Entrée-Sortie À L'aide D'un Produit Scalaire Constant de Deux Vecteurs D'orientationDocument6 pagesTD 20 - Loi Entrée-Sortie À L'aide D'un Produit Scalaire Constant de Deux Vecteurs D'orientationibrahim rabbajPas encore d'évaluation
- S623.2 Comportement Des MecanismesDocument3 pagesS623.2 Comportement Des MecanismesGhada Mouedhen100% (2)
- TD Dynamique Du Point MatérielDocument4 pagesTD Dynamique Du Point Matérielyahya El MfPas encore d'évaluation
- Chapitre 3 CinématiqueDocument41 pagesChapitre 3 CinématiqueNowe AhmadePas encore d'évaluation
- Si MP 2022Document16 pagesSi MP 2022NguyenPas encore d'évaluation
- Sciences Industrielles de L IngénieurDocument65 pagesSciences Industrielles de L IngénieurKOUADIO PATRICEPas encore d'évaluation
- CNC Si MP 2009 CG PDFDocument14 pagesCNC Si MP 2009 CG PDFJassir AmgroudPas encore d'évaluation
- DL2 EnonDocument3 pagesDL2 EnonLucas huzvdcbPas encore d'évaluation
- RevMP Sii AutomatiqueDocument30 pagesRevMP Sii AutomatiqueRebbag AnassPas encore d'évaluation
- Chapitre 2 TorseursDocument13 pagesChapitre 2 TorseursHediFatnassiPas encore d'évaluation
- TD16Document6 pagesTD16Yassine AGPas encore d'évaluation
- Lagrange CoursDocument30 pagesLagrange CoursHorseman AnassPas encore d'évaluation
- Centre D Usinage 5 Axes CorrigeDocument2 pagesCentre D Usinage 5 Axes CorrigeLAILA IDRISSIPas encore d'évaluation
- 138 Ds Mpsi Et Pcsi CinematiqueDocument10 pages138 Ds Mpsi Et Pcsi CinematiqueZaineb AbbadPas encore d'évaluation
- c2 Notion de TorseurDocument6 pagesc2 Notion de TorseurbilalwikiPas encore d'évaluation
- Phys - 027 CINEMATIQUE A 2 ET 3 DIMENSIONDocument15 pagesPhys - 027 CINEMATIQUE A 2 ET 3 DIMENSIONRichard KenandiPas encore d'évaluation
- CH5 CinetiqueDocument17 pagesCH5 CinetiqueMétuschélah Lagouth100% (2)
- Reference Dynamique Du RotorDocument7 pagesReference Dynamique Du Rotorromy94496Pas encore d'évaluation
- III CinématiqueDocument26 pagesIII CinématiqueRayan Arkel EBONGUE EKWALLAPas encore d'évaluation
- C00 Masse Et Inertie Des SolidesDocument5 pagesC00 Masse Et Inertie Des SolidesMarc SalettePas encore d'évaluation
- 1-Mouvement D - Un Point Sur Un Rail Circulaire CorrectionDocument3 pages1-Mouvement D - Un Point Sur Un Rail Circulaire CorrectionOmar OuPas encore d'évaluation
- 14 Modelisation CinematiqueDocument10 pages14 Modelisation Cinematiquemezziwalid099411Pas encore d'évaluation
- Exercice 1: CPGE - LIT - Marrakech Statique TD1 Pcsi1 OuikassiDocument1 pageExercice 1: CPGE - LIT - Marrakech Statique TD1 Pcsi1 Ouikassiakarne Youness100% (1)
- Cours CinematiqueDocument17 pagesCours Cinematiqueecomech0% (1)
- DS2 SiiDocument8 pagesDS2 SiiAHMED ghribiPas encore d'évaluation
- (RDM) (CO) Resistance Des Materiaux PDFDocument30 pages(RDM) (CO) Resistance Des Materiaux PDFZoro LeadPas encore d'évaluation
- Corrigé TD 10 - Comportement Cinématique Des SystèmesDocument5 pagesCorrigé TD 10 - Comportement Cinématique Des Systèmesbhs channelPas encore d'évaluation
- Chapitre4 CisaillementDocument9 pagesChapitre4 CisaillementDawoud MayoufPas encore d'évaluation
- 208 Prehenseur CorrigeDocument4 pages208 Prehenseur CorrigeAhmed TalsiPas encore d'évaluation
- Cours Equa DiffDocument6 pagesCours Equa Diffvianney venceslasPas encore d'évaluation
- TD MK01 13 14Document22 pagesTD MK01 13 14ayman kaTanaPas encore d'évaluation
- CHAPITRE2 PDDocument3 pagesCHAPITRE2 PDDuplexPas encore d'évaluation
- Fiche Chaines de SolidesDocument7 pagesFiche Chaines de Solidesayoub elPas encore d'évaluation
- Preparation Concours2020 Cinetique FormulaireDocument7 pagesPreparation Concours2020 Cinetique FormulaireNowe AhmadePas encore d'évaluation
- 02 Polynomes de LegendreDocument18 pages02 Polynomes de Legendreghouti ghoutiPas encore d'évaluation
- TD 08Document4 pagesTD 08Abdou HamaouiPas encore d'évaluation
- Statique - Exercices Divers ELEVEDocument2 pagesStatique - Exercices Divers ELEVEOussama ZagharPas encore d'évaluation
- Série 2 Théorèmes Généraux CorrDocument7 pagesSérie 2 Théorèmes Généraux Corrsalem nourPas encore d'évaluation
- TD - Déterminer Les Efforts Aux Effecteurs de Structures Ouvertes À L'équilibreDocument9 pagesTD - Déterminer Les Efforts Aux Effecteurs de Structures Ouvertes À L'équilibreennajiPas encore d'évaluation
- (Mod) (TD) Modelisation Des MecanismesDocument25 pages(Mod) (TD) Modelisation Des MecanismesNarjiss ShimiPas encore d'évaluation
- TD 24 Corrigé - Modélisation Des AM de Contact Surfacique - Lois de CoulombDocument8 pagesTD 24 Corrigé - Modélisation Des AM de Contact Surfacique - Lois de CoulombMohamed AbaakilPas encore d'évaluation
- 03 Cin 04 ChainesFermees Applications 01 CorrDocument7 pages03 Cin 04 ChainesFermees Applications 01 CorrMouhcine Ben MoussaPas encore d'évaluation
- TD Dynamique1Document2 pagesTD Dynamique1Mak AlPas encore d'évaluation
- Matrice D'inertieDocument4 pagesMatrice D'inertieJean AbelaPas encore d'évaluation
- Cours Sur Les StructuresDocument29 pagesCours Sur Les Structuresapi-302372012Pas encore d'évaluation
- Examen Jan 2017-CorrigéDocument3 pagesExamen Jan 2017-Corrigéyasahiro 10Pas encore d'évaluation
- Résumé Transmettre 2020Document17 pagesRésumé Transmettre 2020kuzgun cebeciPas encore d'évaluation
- TD N°3 Cinématique Du Contact PonctuelDocument4 pagesTD N°3 Cinématique Du Contact PonctuelAmine RbzPas encore d'évaluation
- BAC Etude Des Constructions Options A Et B 2010 STIMECADocument28 pagesBAC Etude Des Constructions Options A Et B 2010 STIMECAKamel HamdiPas encore d'évaluation
- NomenclatureDocument3 pagesNomenclatureKamel HamdiPas encore d'évaluation
- Calcul Dentropie Piston Adiabatique ExerciceDocument4 pagesCalcul Dentropie Piston Adiabatique ExerciceKamel HamdiPas encore d'évaluation
- Cours ThermoDocument340 pagesCours ThermoKamel HamdiPas encore d'évaluation
- 34-105 Thermodynamique Deuxieme PrincipeDocument10 pages34-105 Thermodynamique Deuxieme PrincipeKamel HamdiPas encore d'évaluation
- Examen Constructin 14-15Document1 pageExamen Constructin 14-15Kamel HamdiPas encore d'évaluation
- CVDocument5 pagesCVKamel HamdiPas encore d'évaluation
- CoussinetDocument1 pageCoussinetntayoubPas encore d'évaluation
- 7197Document94 pages7197Kamel HamdiPas encore d'évaluation
- 20 Notions de BaseDocument7 pages20 Notions de BaseKamel HamdiPas encore d'évaluation
- FraisageDocument97 pagesFraisageZahra Houmairi100% (4)
- CFAO FraisageDocument17 pagesCFAO FraisageYouness Ouarrak100% (1)
- Calcul VectorielDocument3 pagesCalcul VectorielKamel HamdiPas encore d'évaluation
- 7 CatalogueDocument28 pages7 CatalogueKamel HamdiPas encore d'évaluation
- Geo Emploi 11Document2 pagesGeo Emploi 11Kamel HamdiPas encore d'évaluation
- La Tech InfoDocument173 pagesLa Tech InfosdPas encore d'évaluation
- La Tech InfoDocument173 pagesLa Tech InfosdPas encore d'évaluation
- RDMDocument87 pagesRDMWissem Ben YahiaPas encore d'évaluation
- RDMDocument87 pagesRDMWissem Ben YahiaPas encore d'évaluation
- 2JRST - Programme Des JournéesDocument4 pages2JRST - Programme Des JournéesKamel HamdiPas encore d'évaluation
- Apprenez A Utiliser SolidworksDocument257 pagesApprenez A Utiliser Solidworksboite_testePas encore d'évaluation
- 3 6 Page3Document7 pages3 6 Page3Kamel HamdiPas encore d'évaluation
- Polycop PhysDocument33 pagesPolycop PhysMedoumar Alagude100% (1)
- La Genie ElectDocument300 pagesLa Genie Electmohamedattouche0% (1)
- 6 ConvertisseurDocument38 pages6 ConvertisseurUsthb EtudiantPas encore d'évaluation
- 3 6 Page3Document7 pages3 6 Page3Kamel HamdiPas encore d'évaluation
- CM04Document26 pagesCM04Kamel HamdiPas encore d'évaluation
- 3 6 Page3Document7 pages3 6 Page3Kamel HamdiPas encore d'évaluation
- 3 6 Page3Document7 pages3 6 Page3Kamel HamdiPas encore d'évaluation
- DJE4394Document119 pagesDJE4394danPas encore d'évaluation
- Année Prépa Electricité, Deuxième PartieDocument221 pagesAnnée Prépa Electricité, Deuxième PartieAbdelkader Faklani DouPas encore d'évaluation
- Api RestDocument8 pagesApi RestfogoPas encore d'évaluation
- NF EN 1431 (Mai 2009)Document19 pagesNF EN 1431 (Mai 2009)Fatima BouhajaPas encore d'évaluation
- Rapport Optimisation Sur MatlabDocument13 pagesRapport Optimisation Sur MatlabLino YETONGNONPas encore d'évaluation
- Transferts en PoreuxDocument644 pagesTransferts en PoreuxYacine KaPas encore d'évaluation
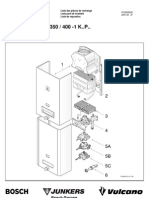
- W - 250 - 275 - 325 - 350 - 400 - 1 K..p..Document28 pagesW - 250 - 275 - 325 - 350 - 400 - 1 K..p..joviadoPas encore d'évaluation
- FeuilletageDocument25 pagesFeuilletageLē JøkērPas encore d'évaluation
- Didacticiel Papier - Sphinx Iq 2 PDFDocument442 pagesDidacticiel Papier - Sphinx Iq 2 PDFAthenaDona100% (1)
- Cours Lignes de Transmission Séance Adaptation D'impédance 2011 2012Document8 pagesCours Lignes de Transmission Séance Adaptation D'impédance 2011 2012benlamlihPas encore d'évaluation
- 04 JSFT-echangeur-2012 GRESPI Fohanno PDFDocument21 pages04 JSFT-echangeur-2012 GRESPI Fohanno PDFzermiPas encore d'évaluation
- ChapitreDocument8 pagesChapitreAchour IfrekPas encore d'évaluation
- Serco FDocument26 pagesSerco FRV PenrroiPas encore d'évaluation
- DS SDM S1 2015 CorrectionDocument2 pagesDS SDM S1 2015 CorrectiondsiscnPas encore d'évaluation
- Algèbre 1 V. Def 2017-2018Document141 pagesAlgèbre 1 V. Def 2017-2018Alexis Rosuel100% (1)
- TF06 P09 MedianDocument4 pagesTF06 P09 MedianAyt Moha BrahimPas encore d'évaluation
- GPM Tle C 3e Edition.Document258 pagesGPM Tle C 3e Edition.Pierrot Jules AMOUSSOU100% (2)
- Examen de Fin de Formation 2008 Tsri Pratique Variante 9Document5 pagesExamen de Fin de Formation 2008 Tsri Pratique Variante 9FatimaLEPas encore d'évaluation
- TD Regime de Neutre TTDocument4 pagesTD Regime de Neutre TTOlivier FLOHRPas encore d'évaluation
- Incendie: I-Prévention Et ProtectionDocument4 pagesIncendie: I-Prévention Et Protectionraid bazizPas encore d'évaluation
- Ajust ExpoDocument4 pagesAjust ExpoMme_Sos100% (1)
- ANNONCES ASSISTANTS MATERNELS-Disponibilités Secteur Lyautey Du 12 Juin 2020Document3 pagesANNONCES ASSISTANTS MATERNELS-Disponibilités Secteur Lyautey Du 12 Juin 2020younes amaraPas encore d'évaluation
- Sujet Bac 2023 Guinee Niger MathsDocument5 pagesSujet Bac 2023 Guinee Niger Mathsmr.4chiffrePas encore d'évaluation
- Corrige TD 8 1920 2Document5 pagesCorrige TD 8 1920 2friends diaryPas encore d'évaluation
- Howto L3 IntervlanroutingDocument7 pagesHowto L3 IntervlanroutingWilford ToussaintPas encore d'évaluation
- 3 - Modeles de Markov CachesDocument34 pages3 - Modeles de Markov CachesWISSALPas encore d'évaluation
- GISEMENTDocument4 pagesGISEMENTTouré AbdoulPas encore d'évaluation
- Maths X PSI 1998 (Enoncé)Document7 pagesMaths X PSI 1998 (Enoncé)LM --Pas encore d'évaluation
- Mémoire de Master-YF-Post Soutenance-20200610Document70 pagesMémoire de Master-YF-Post Soutenance-20200610Yacinthe FAYE100% (1)
- Cours ExcelDocument80 pagesCours ExcelLahcen Boufouss100% (1)