Vous aimerez peut-être aussi
- Cours de CommutationDocument63 pagesCours de Commutationwantedpseudo90% (40)
- Eyrolles - Tests de QIDocument15 pagesEyrolles - Tests de QIJoel Takoulo100% (3)
- Dynamique: Les Grands Articles d'UniversalisD'EverandDynamique: Les Grands Articles d'UniversalisPas encore d'évaluation
- Support D'exercices CompletDocument28 pagesSupport D'exercices CompletdioumbPas encore d'évaluation
- Cours Optique BeldjilaliDocument58 pagesCours Optique BeldjilaliPrince Abdoo100% (1)
- Exemples Patrick PaultreDocument41 pagesExemples Patrick Paultremostefaoui mohammed100% (1)
- Oscillations Mécaniques - 2020-WahabDiopDocument2 pagesOscillations Mécaniques - 2020-WahabDiopHamadi DialloPas encore d'évaluation
- Les OscillationsDocument20 pagesLes OscillationsSouha MiralePas encore d'évaluation
- Oscillateurs PDFDocument26 pagesOscillateurs PDFzaki.loukioPas encore d'évaluation
- OscillateursDocument27 pagesOscillateursbeinouPas encore d'évaluation
- Oscillateur Mécanique PDFDocument25 pagesOscillateur Mécanique PDFAkram EkkoPas encore d'évaluation
- 1 Chapitre1-1ddlDocument25 pages1 Chapitre1-1ddlraffai_nadaPas encore d'évaluation
- Cours Lois Électriques 32Document112 pagesCours Lois Électriques 32Frédéric QuérinjeanPas encore d'évaluation
- Ch1 - Oscillateurs HarmoniquesDocument6 pagesCh1 - Oscillateurs Harmoniquesloubna moufidPas encore d'évaluation
- Serie2 - Dynamique Des Structures 2019 PDFDocument2 pagesSerie2 - Dynamique Des Structures 2019 PDFMohamed ZakritiPas encore d'évaluation
- 6 G3 OscillationsDocument22 pages6 G3 OscillationsnateusssPas encore d'évaluation
- 6G3Oscillations PDFDocument22 pages6G3Oscillations PDFAliOucharPas encore d'évaluation
- L05 PHR004 2010 PDFDocument22 pagesL05 PHR004 2010 PDFMarwane OuadadPas encore d'évaluation
- Cours OscillationsDocument18 pagesCours OscillationsaliabdalghafourPas encore d'évaluation
- td2 VibraDocument5 pagestd2 VibraAilton muhanchePas encore d'évaluation
- Mec Forc WebDocument3 pagesMec Forc WebhamidaPas encore d'évaluation
- 4 Reponse Sismique A Un Oscillateur A Un Degre de LiberteDocument12 pages4 Reponse Sismique A Un Oscillateur A Un Degre de Libertemoulawain100% (1)
- Cours Vibration2020Document14 pagesCours Vibration2020Mohammed TlmPas encore d'évaluation
- S6 Chapitre 6 Oscillations MecaniquesDocument12 pagesS6 Chapitre 6 Oscillations MecaniquesDabo100% (1)
- Série 2 - Phénomène de Vibration - 20 - 21Document3 pagesSérie 2 - Phénomène de Vibration - 20 - 21Kpabou KpabouPas encore d'évaluation
- 4 OscillateurDocument18 pages4 Oscillateurmamihax729Pas encore d'évaluation
- Cours de Physique Des Ondes Chapitre Trois Version 6Document18 pagesCours de Physique Des Ondes Chapitre Trois Version 6aouimeur abdellehPas encore d'évaluation
- Compte Rendu Du TP de Mécanique Du PointDocument14 pagesCompte Rendu Du TP de Mécanique Du PointBoutayna J03Pas encore d'évaluation
- BQPRK CHAPITREDocument7 pagesBQPRK CHAPITRETaki GoumriPas encore d'évaluation
- Chapitre 2 Réponse ÉlastiqueDocument28 pagesChapitre 2 Réponse ÉlastiqueSaid MtacyprPas encore d'évaluation
- Chap02. Réponse Elastique Des Structures Aux SéismesDocument27 pagesChap02. Réponse Elastique Des Structures Aux Séismesahmadomar89Pas encore d'évaluation
- Ondes v3Document42 pagesOndes v3Abder BenPas encore d'évaluation
- C5 RéductionDocument18 pagesC5 Réductionabdeldjalil bouchermaPas encore d'évaluation
- Physique Des Ondes II - 2A - Poly - 2022 2023Document48 pagesPhysique Des Ondes II - 2A - Poly - 2022 2023Tadessé NicolyPas encore d'évaluation
- OcillateursDocument77 pagesOcillateursrenePas encore d'évaluation
- Systemes 1ddlDocument21 pagesSystemes 1ddlYoucef BenhalilemPas encore d'évaluation
- Chapitre02.réponses Élastiques Des Structures PDFDocument26 pagesChapitre02.réponses Élastiques Des Structures PDFMohamed HaykelPas encore d'évaluation
- Vibration Cours 2 PDFDocument26 pagesVibration Cours 2 PDFAchraf MoutaharPas encore d'évaluation
- Systemes OscillantsDocument6 pagesSystemes OscillantsMehdi BelkPas encore d'évaluation
- TP1 C10Document9 pagesTP1 C10Souleymane Hermann BoroPas encore d'évaluation
- MP Physique Mines 1 2016.enonceDocument7 pagesMP Physique Mines 1 2016.enonceYahya MazouariPas encore d'évaluation
- Cours 1Document18 pagesCours 1Robert PrincePas encore d'évaluation
- td4 Oscillateur HarmoniqueDocument1 pagetd4 Oscillateur HarmoniqueschleckyPas encore d'évaluation
- Chapitre 1 Oscillations 2016-2017Document14 pagesChapitre 1 Oscillations 2016-2017bessisnathanePas encore d'évaluation
- Chapitre 1: Introduction À La Dynamique Des Fluides Newtoniens CompressiblesDocument16 pagesChapitre 1: Introduction À La Dynamique Des Fluides Newtoniens CompressiblesJuarez AGOSSAPas encore d'évaluation
- MecaFluides3sur6 PDFDocument30 pagesMecaFluides3sur6 PDFBayaghiou DialloPas encore d'évaluation
- Oscillateur Harmonique Horizontal (Cours)Document6 pagesOscillateur Harmonique Horizontal (Cours)GafiPas encore d'évaluation
- EPST Onde&Vibrations TDDocument7 pagesEPST Onde&Vibrations TDRafikWaynePas encore d'évaluation
- Travaux Dirigés de Mécanique N°4: Exercice 1: Mesure D'un Coefficient de ViscositéDocument3 pagesTravaux Dirigés de Mécanique N°4: Exercice 1: Mesure D'un Coefficient de ViscositéMedjahed MhåmędPas encore d'évaluation
- A4181D55Document8 pagesA4181D55bvghftPas encore d'évaluation
- CHAP3Document12 pagesCHAP3elsa olive ze100% (1)
- DM1 20Document4 pagesDM1 20Kahil LaibPas encore d'évaluation
- CoursSeriesTemp Chap1Document58 pagesCoursSeriesTemp Chap1fouadPas encore d'évaluation
- TD N°01-Vm-20-21Document8 pagesTD N°01-Vm-20-21Ma NarPas encore d'évaluation
- Année Prépa Oscillateurs, Généralités PDFDocument176 pagesAnnée Prépa Oscillateurs, Généralités PDFAbdelkader Faklani DouPas encore d'évaluation
- Chapitre I Vibrations Et Modélisations-GénéralitésDocument14 pagesChapitre I Vibrations Et Modélisations-Généralitéselkhouddar yassinePas encore d'évaluation
- DIsrael 10 CH 5Document24 pagesDIsrael 10 CH 5anesbelabdi02Pas encore d'évaluation
- Ondes Et Vibrations: IUT, Année 2008-09Document16 pagesOndes Et Vibrations: IUT, Année 2008-09Armand StevenskiPas encore d'évaluation
- Mham TDDocument15 pagesMham TDkindaishiPas encore d'évaluation
- Oscillateur À 1dlDocument9 pagesOscillateur À 1dlBadrBenabboudPas encore d'évaluation
- Exposé Sur ArdruinoDocument31 pagesExposé Sur ArdruinodioumbPas encore d'évaluation
- Automatisme: FEUX DE CARREFOUR: Cahier Des Charges 1Document2 pagesAutomatisme: FEUX DE CARREFOUR: Cahier Des Charges 1dioumbPas encore d'évaluation
- BclogoDocument24 pagesBclogodioumbPas encore d'évaluation
- 2 - Commutation T+®l+®phoniqueDocument54 pages2 - Commutation T+®l+®phoniquedioumbPas encore d'évaluation
- DSTDocument2 pagesDSTdioumbPas encore d'évaluation
- Plaquette DoctorialemathsinfoDocument4 pagesPlaquette DoctorialemathsinfodioumbPas encore d'évaluation
- Support de Cours NSVEDocument491 pagesSupport de Cours NSVEdioumbPas encore d'évaluation
- RTC 2 PDFDocument21 pagesRTC 2 PDFdioumbPas encore d'évaluation
- Lexique Anglais - FR RDMDocument4 pagesLexique Anglais - FR RDMqzm74l100% (2)
- Tableaucomparatifdesduretes PDFDocument1 pageTableaucomparatifdesduretes PDFAnonymous dziHEjc7YPas encore d'évaluation
- Prepa Eps 4 BTS 2023Document7 pagesPrepa Eps 4 BTS 2023bkeutchayaPas encore d'évaluation
- Formes Structurales PDFDocument15 pagesFormes Structurales PDFMohammed Mammar KouadriPas encore d'évaluation
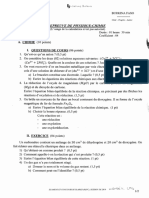
- Bepc 2019 1ertour PCDocument2 pagesBepc 2019 1ertour PCJacques JeanPas encore d'évaluation
- Correction TD Flexion-1234 PDFDocument20 pagesCorrection TD Flexion-1234 PDFIkbel HahaPas encore d'évaluation
- Les Équilibres Doxydo RéductionDocument15 pagesLes Équilibres Doxydo RéductionyosserPas encore d'évaluation
- C.M. 2Document36 pagesC.M. 2hdoi91775Pas encore d'évaluation
- TP1 TractionDocument7 pagesTP1 TractionPse UdoPas encore d'évaluation
- tp4 Influence Des Traitements Thermiques Sur Les Propric3a9tc3a9s Mc3a9caniques Des Polymc3a8res - Duretc3a9 Et Rc3a9silienceDocument11 pagestp4 Influence Des Traitements Thermiques Sur Les Propric3a9tc3a9s Mc3a9caniques Des Polymc3a8res - Duretc3a9 Et Rc3a9silienceAnoir MatiPas encore d'évaluation
- Thèse de Doctorat: Université de Paris Sud XIDocument168 pagesThèse de Doctorat: Université de Paris Sud XITa SouadPas encore d'évaluation
- Electrolyse Exercices Corriges 02Document4 pagesElectrolyse Exercices Corriges 02Zineddine SahirPas encore d'évaluation
- Compte Rendu TP 3Document9 pagesCompte Rendu TP 3sidi mohamed el amine nekkal100% (1)
- DS2010Document2 pagesDS2010Mohamed HmamouchPas encore d'évaluation
- g25 Extrait Editions GingerDocument7 pagesg25 Extrait Editions Gingersosi2020Pas encore d'évaluation
- Champ Électrique Et Électrostatique - Résumé Et Révision - Physique-Chimie - SchoolMouvDocument4 pagesChamp Électrique Et Électrostatique - Résumé Et Révision - Physique-Chimie - SchoolMouvSarah JOULAINIPas encore d'évaluation
- Caracté Panneau SandwichDocument166 pagesCaracté Panneau SandwichKHOULOUD BOUAZIZPas encore d'évaluation
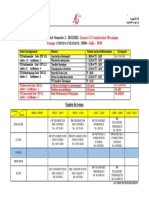
- Reprise en Présentiel - Semestre 2 - 2021/2022-: Licence L3 Construction Mécanique Groupe 1-Salle: H-09Document1 pageReprise en Présentiel - Semestre 2 - 2021/2022-: Licence L3 Construction Mécanique Groupe 1-Salle: H-09Fee KaPas encore d'évaluation
- Chap3 VetdDocument16 pagesChap3 VetdDialloPas encore d'évaluation
- Élément FinisDocument109 pagesÉlément Finismaryam sendiPas encore d'évaluation
- Poste A Souder Saf Digisteel 520Document184 pagesPoste A Souder Saf Digisteel 520Hamda Ben Haj YoussefPas encore d'évaluation
- MMC CH01Document15 pagesMMC CH01Zied AbidiPas encore d'évaluation
- Chimie Inorganique - Plan de Cours Trimestre Automne - Universite Sherbrooke 2007Document5 pagesChimie Inorganique - Plan de Cours Trimestre Automne - Universite Sherbrooke 2007Trần NguyênPas encore d'évaluation
- Cours StéréochimieDocument12 pagesCours Stéréochimiezineb.elmiayarPas encore d'évaluation
- ChimieDocument6 pagesChimieJedida NgassaPas encore d'évaluation
- Devoir 4Document2 pagesDevoir 4Mohamed WidadPas encore d'évaluation
- Proprietes Principales Des MetauxDocument3 pagesProprietes Principales Des Metauxdiawsamba006Pas encore d'évaluation
- Climatisation Industrielle Et FroidDocument21 pagesClimatisation Industrielle Et FroidGuerrna KoutatoukaPas encore d'évaluation
- TP Des Sollicitations SimplesDocument46 pagesTP Des Sollicitations Simplesaziz ouradaPas encore d'évaluation