Vous aimerez peut-être aussi
- Analyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2D'EverandAnalyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2Pas encore d'évaluation
- Chapitre 4 Transformee en ZDocument7 pagesChapitre 4 Transformee en ZGray AbPas encore d'évaluation
- LE SYSTEME DIGESTIF-pentru Studenti Rezolvat Dobrin CristinaDocument11 pagesLE SYSTEME DIGESTIF-pentru Studenti Rezolvat Dobrin CristinaCristina DobrinPas encore d'évaluation
- TP4 RLCDocument3 pagesTP4 RLCCircuit couple0% (1)
- 4 - Dermatologie - Mycoses Cutanées SuperficiellesDocument6 pages4 - Dermatologie - Mycoses Cutanées SuperficiellesÉmilie du Châtelet100% (1)
- Cours ComptaDocument72 pagesCours ComptaKhadija Lakhdiri100% (1)
- Chapitre 5 - Synthèse Des Filtre RIIDocument18 pagesChapitre 5 - Synthèse Des Filtre RIIimane takhiPas encore d'évaluation
- Cercle APS Autonomie Alimentaire 5 Legumes PerpetuelsDocument10 pagesCercle APS Autonomie Alimentaire 5 Legumes PerpetuelsDaron MotardPas encore d'évaluation
- Automatique, Informatique Et Informatique Industielle0001Document16 pagesAutomatique, Informatique Et Informatique Industielle0001Ilyass Hani100% (1)
- Chapitre 2Document16 pagesChapitre 2Timble GrandenPas encore d'évaluation
- FR ITIL4 FND 2019 SamplePaper2 QuestionBk v1.0.1Document12 pagesFR ITIL4 FND 2019 SamplePaper2 QuestionBk v1.0.1Guillaume St-Gelais0% (1)
- Facture: Monsieur Rúben Miguel de Oliveira Carriço Grand-Verger, Rue Du 11 1920 MartignyDocument3 pagesFacture: Monsieur Rúben Miguel de Oliveira Carriço Grand-Verger, Rue Du 11 1920 MartignyrubzzyPas encore d'évaluation
- Catalogue de Dégradations Sur Routes RevêtuesDocument25 pagesCatalogue de Dégradations Sur Routes RevêtuesEric Sana100% (1)
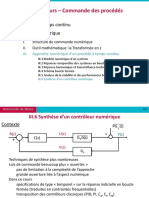
- Mon Cours Étudiant A&r - Commande NumériqueDocument50 pagesMon Cours Étudiant A&r - Commande NumériqueMouhamed DioufPas encore d'évaluation
- 5BTC Hyper Part2 09Document60 pages5BTC Hyper Part2 09Yàs SîñéPas encore d'évaluation
- Calcul Stochastique Appliqué À La Finance. Volatilités Stochastique, Locale Et ImpliciteDocument7 pagesCalcul Stochastique Appliqué À La Finance. Volatilités Stochastique, Locale Et Implicitesonia969696Pas encore d'évaluation
- Chapitre 3Document12 pagesChapitre 3yasmine hmn0% (1)
- Au41 C Chapitre 8Document40 pagesAu41 C Chapitre 8Bassem BhiriPas encore d'évaluation
- Ligne Regime Sinusoidal PDFDocument13 pagesLigne Regime Sinusoidal PDFFlávio ÁvilahPas encore d'évaluation
- Automatique Chap 2 Transformé en ZDocument18 pagesAutomatique Chap 2 Transformé en ZbadrPas encore d'évaluation
- Cours AutomatiqueDocument77 pagesCours AutomatiqueAmadou Abdoulaye DIENGPas encore d'évaluation
- Repr Esentation Et Analyse Des Syst' Emes Lin Eaires Cours 3 Stabilit e Des Syst' Emes DynamiquesDocument21 pagesRepr Esentation Et Analyse Des Syst' Emes Lin Eaires Cours 3 Stabilit e Des Syst' Emes Dynamiquesbelaliakarim82Pas encore d'évaluation
- Asservissement Numérique: Réponse Des Systèmes À Temps Discret Systeme D'ordre 1 Chapitre 3Document20 pagesAsservissement Numérique: Réponse Des Systèmes À Temps Discret Systeme D'ordre 1 Chapitre 3Radouan RadwanPas encore d'évaluation
- TP16Document4 pagesTP16Anais DjadelPas encore d'évaluation
- An 4Document4 pagesAn 4zain zagoraPas encore d'évaluation
- Support CH 1 2 3 4 PDFDocument42 pagesSupport CH 1 2 3 4 PDFAyoub KhazazPas encore d'évaluation
- Série TD N°1Document3 pagesSérie TD N°1Wã Lïd SãådätPas encore d'évaluation
- P 07 CT 2 CBDocument4 pagesP 07 CT 2 CBMihnea GamanPas encore d'évaluation
- Chap3 - Stabilité Des SANsDocument14 pagesChap3 - Stabilité Des SANsChris ShulzPas encore d'évaluation
- Analyse FréquentielleDocument10 pagesAnalyse Fréquentielle7rtk6bm4jtPas encore d'évaluation
- Sujet AUT104Document3 pagesSujet AUT104Oussama SadkiPas encore d'évaluation
- Chapitre II - Transformée en ZDocument18 pagesChapitre II - Transformée en ZAli BelabedPas encore d'évaluation
- Article Elliptique 26 01 2017Document17 pagesArticle Elliptique 26 01 2017christianPas encore d'évaluation
- Interro TRM M1 6 Décembre2015Document4 pagesInterro TRM M1 6 Décembre2015Chakib ChPas encore d'évaluation
- Exos Corrigés Analyse de Filtre NumDocument3 pagesExos Corrigés Analyse de Filtre NumDoc100% (1)
- 10.théorèmes FondamentauxDocument26 pages10.théorèmes FondamentauxRuphin KabaselePas encore d'évaluation
- 1 - TD13 Cinématique Schémas CinématiquesDocument6 pages1 - TD13 Cinématique Schémas CinématiquesCorentin ProdPas encore d'évaluation
- Chap 5Document16 pagesChap 5Médard AHISSOUPas encore d'évaluation
- Commande Numérique Partie3Document48 pagesCommande Numérique Partie3FLASPas encore d'évaluation
- LM210 Partiel Corrige B 20 21Document3 pagesLM210 Partiel Corrige B 20 21anh thu TranPas encore d'évaluation
- Corrigé Partie C TD4Document10 pagesCorrigé Partie C TD4Aziz Ben AbedlwahedPas encore d'évaluation
- 4-Analyse Frequentielle Des Systemes LineairesDocument14 pages4-Analyse Frequentielle Des Systemes LineairesBouallegue Mounir100% (2)
- ExoDocument29 pagesExoMahj AyouPas encore d'évaluation
- PartielDocument2 pagesPartielBenjamin SeguinPas encore d'évaluation
- Oscillate Ur WienDocument9 pagesOscillate Ur WienMariam AznabetPas encore d'évaluation
- Corrigé TAS 2017 18Document3 pagesCorrigé TAS 2017 18Dounia OuzagPas encore d'évaluation
- S3 AUTO-1 Ch3 RT 101023Document20 pagesS3 AUTO-1 Ch3 RT 101023Wiàm ZanobàPas encore d'évaluation
- SLCI - Analyse FréquentielleDocument10 pagesSLCI - Analyse FréquentielleBah KhalilPas encore d'évaluation
- Transformé de LaplaceDocument5 pagesTransformé de LaplaceJaona RakotonirinaPas encore d'évaluation
- Cours Fonctions ElliptiquesDocument39 pagesCours Fonctions ElliptiquesKev MoebiusPas encore d'évaluation
- Filtrage AnalogiqueDocument47 pagesFiltrage AnalogiqueFranck LecocqPas encore d'évaluation
- Asserv Analyse Fréquentiel 16 17Document10 pagesAsserv Analyse Fréquentiel 16 17helio_1972Pas encore d'évaluation
- ElectroMagn - PP - 9 - 07-08 - v10Document20 pagesElectroMagn - PP - 9 - 07-08 - v10Daba Cheikh WadePas encore d'évaluation
- TD Régulation EMSI Série 2Document5 pagesTD Régulation EMSI Série 2SalabPas encore d'évaluation
- TP4 Système Asservis OctaveDocument4 pagesTP4 Système Asservis Octavebenaissa maherPas encore d'évaluation
- Dynamique Des Structures - Cours6 - 2020Document34 pagesDynamique Des Structures - Cours6 - 2020somaya ehPas encore d'évaluation
- Canthi TRNyqDocument31 pagesCanthi TRNyqflorencebaibouPas encore d'évaluation
- Fic 00077Document14 pagesFic 00077Abdelwahab.gfPas encore d'évaluation
- Aide RSTDocument4 pagesAide RSTGeorges SalloumPas encore d'évaluation
- Introduction Aux EDP D' EvolutionDocument36 pagesIntroduction Aux EDP D' Evolutionبن سعدPas encore d'évaluation
- CH 6Document32 pagesCH 6boulainine houriaPas encore d'évaluation
- Chapitre 2Document18 pagesChapitre 2KaderPas encore d'évaluation
- (E) DiscretisationDocument8 pages(E) Discretisationyassine78Pas encore d'évaluation
- COURS Regime SinusoidalDocument22 pagesCOURS Regime SinusoidalFanomezana RakotomalalaPas encore d'évaluation
- Examen 24 Mai 2017 Questions Et ReponsesDocument8 pagesExamen 24 Mai 2017 Questions Et Reponseshéma tologiePas encore d'évaluation
- Chapitre 5Document45 pagesChapitre 5Algerian AissaouiPas encore d'évaluation
- La Marque - MarketingDocument261 pagesLa Marque - Marketingrafik ikhedjiPas encore d'évaluation
- DAO Achats Kits Aratoire Et Semences Maraîchères - Projet COM NORDDocument9 pagesDAO Achats Kits Aratoire Et Semences Maraîchères - Projet COM NORDouangtching bayangPas encore d'évaluation
- Guide de Rédaction D'un Mémoire de PFE ISV Blida1Document17 pagesGuide de Rédaction D'un Mémoire de PFE ISV Blida1Ouissem BelkhousPas encore d'évaluation
- Coursntraintes PDFDocument27 pagesCoursntraintes PDFasheithamPas encore d'évaluation
- BPM - IteropDocument7 pagesBPM - IteroptolmousPas encore d'évaluation
- 2 Serie td2 Les Echanges Cellulaires 2016 2017Document2 pages2 Serie td2 Les Echanges Cellulaires 2016 2017Stephan Effim67% (3)
- Fluctuart 2022 - Catalog - DigitalDocument17 pagesFluctuart 2022 - Catalog - Digitalassilzina64Pas encore d'évaluation
- Cours de Methodologie de La Recherche - Masters2 - UFRSEGDocument31 pagesCours de Methodologie de La Recherche - Masters2 - UFRSEGAlphonse GnamiPas encore d'évaluation
- BDocument13 pagesBmichelmichelPas encore d'évaluation
- Chapitre2 Fibre OptiqueDocument33 pagesChapitre2 Fibre OptiqueRosny TakeuPas encore d'évaluation
- 093 Radiculalgie Et Syndrome CanalaireDocument3 pages093 Radiculalgie Et Syndrome CanalaireChloé ThépenierPas encore d'évaluation
- Note D'intention - Pfe - Picard AlizeeDocument34 pagesNote D'intention - Pfe - Picard AlizeeAlizée PicardPas encore d'évaluation
- Nouveau Document Microsoft Office WordDocument2 pagesNouveau Document Microsoft Office WordIsmail OuskarPas encore d'évaluation
- Thlou 0080-2654 1983 Num 14 1 1956 t1 0101 0000 3Document5 pagesThlou 0080-2654 1983 Num 14 1 1956 t1 0101 0000 3palemapagatelePas encore d'évaluation
- Gustave Flaubert Un Coeur Simple Resume Personnages Et AnalyseDocument6 pagesGustave Flaubert Un Coeur Simple Resume Personnages Et AnalysejajaPas encore d'évaluation
- Ouvrir M08 - Module Réparation Moteur EssenceDocument76 pagesOuvrir M08 - Module Réparation Moteur EssenceYassine AboussalahPas encore d'évaluation
- Vex700t Doc TechniqueDocument20 pagesVex700t Doc TechniqueDumoutierPas encore d'évaluation
- 24319165822Document2 pages24319165822Ömer GüneşPas encore d'évaluation
- Tipe Au Sujet Des Bâtiment Sismiques Réalisé Par (SABRI Yassir)Document22 pagesTipe Au Sujet Des Bâtiment Sismiques Réalisé Par (SABRI Yassir)Sabri YassirePas encore d'évaluation
- Code de Pointage de Gym FemininDocument212 pagesCode de Pointage de Gym Femininellidrissimohamed2005Pas encore d'évaluation
- Humanistica Lovaniensia Vol. 6, 1938 - ADRIEN BARLANDUS HUMANISTE BELGE 1486-1538 - Sa Vie - Son Œuvre - Sa Personnalité PDFDocument368 pagesHumanistica Lovaniensia Vol. 6, 1938 - ADRIEN BARLANDUS HUMANISTE BELGE 1486-1538 - Sa Vie - Son Œuvre - Sa Personnalité PDFVetusta MaiestasPas encore d'évaluation
- Corrigé TD 13Document13 pagesCorrigé TD 13quelqu’unPas encore d'évaluation
- Examen Inst Domes 2020 2021Document4 pagesExamen Inst Domes 2020 2021Mohamed BziouechPas encore d'évaluation