Vous aimerez peut-être aussi
- Le système d'approvisionnement en terres dans les villes d'Afrique de l'Ouest: L’exemple de BamakoD'EverandLe système d'approvisionnement en terres dans les villes d'Afrique de l'Ouest: L’exemple de BamakoPas encore d'évaluation
- Rappel MOCNDocument13 pagesRappel MOCNrtuiojPas encore d'évaluation
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- Sadt 2Document12 pagesSadt 2Armand EssPas encore d'évaluation
- Fiabilité, maintenance prédictive et vibration des machinesD'EverandFiabilité, maintenance prédictive et vibration des machinesPas encore d'évaluation
- Compte Rendu CN Labidi Rayen L2CFM G2Document18 pagesCompte Rendu CN Labidi Rayen L2CFM G2Ghassen BoussaaPas encore d'évaluation
- Ajustements CoursDocument4 pagesAjustements CoursGuy OmangPas encore d'évaluation
- Grafcet: Animation de Grafcets Avec Séquences Et Alternées Et SimultanéesDocument8 pagesGrafcet: Animation de Grafcets Avec Séquences Et Alternées Et SimultanéesAFADPas encore d'évaluation
- Machine de Perçage Et Découpage Automatisée: I. Cahier de ChargeDocument3 pagesMachine de Perçage Et Découpage Automatisée: I. Cahier de ChargeSyrine MzoughiPas encore d'évaluation
- Automatisation TriDocument17 pagesAutomatisation TriChafiq SoufianePas encore d'évaluation
- TP Appareil Tridimensionnel SOUKADocument14 pagesTP Appareil Tridimensionnel SOUKANo RayaPas encore d'évaluation
- Chapitre II Le GrafcetDocument16 pagesChapitre II Le Grafcetsociété ettrisiti oulad fares100% (1)
- Compte Rendu FCNDocument11 pagesCompte Rendu FCNYassinePas encore d'évaluation
- Corrigé S1 2013Document7 pagesCorrigé S1 2013youssefelalaouiPas encore d'évaluation
- S52-1 - Analyse Fonctionnelle Interne D'un SADocument24 pagesS52-1 - Analyse Fonctionnelle Interne D'un SAFosseni DialloPas encore d'évaluation
- Réalisation Et Commande D'un Drone QuadrirotorDocument85 pagesRéalisation Et Commande D'un Drone QuadrirotorAbir Ben AmmarPas encore d'évaluation
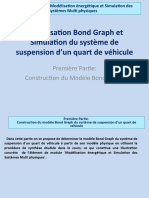
- Naitali-EIGE452-Correction TD BG Système de Suspension-1èrePartie (1) .PpsDocument30 pagesNaitali-EIGE452-Correction TD BG Système de Suspension-1èrePartie (1) .PpsEl GhafraouiPas encore d'évaluation
- Automate ProgrammableDocument15 pagesAutomate ProgrammableMehdi ÊlPas encore d'évaluation
- GE S2 M8.2 Automatismes L&I TP Manip4 EL Hammoumi ConvertiDocument2 pagesGE S2 M8.2 Automatismes L&I TP Manip4 EL Hammoumi ConvertiMontasar MbarkiPas encore d'évaluation
- CH Elements PneumatiquesDocument8 pagesCH Elements PneumatiquesNabilBouabana100% (1)
- TP Modele GeometriqueDocument8 pagesTP Modele GeometriqueAmine EL FERHANIPas encore d'évaluation
- Chap 4 TOURNAGE FRAISAGE PDFDocument3 pagesChap 4 TOURNAGE FRAISAGE PDFAmer ChaffaiPas encore d'évaluation
- Polycop Cours Automatismes IndustrielsDocument48 pagesPolycop Cours Automatismes IndustrielssalaheddinekreitPas encore d'évaluation
- TP TournageDocument3 pagesTP TournageHajar Oumnas100% (1)
- Présentation Pfe JribiDocument35 pagesPrésentation Pfe JribiEzer HelaouiPas encore d'évaluation
- Final PDFDocument109 pagesFinal PDFAbdessattar AbdouPas encore d'évaluation
- Bougoffa Ramez Mohamed LamineDocument87 pagesBougoffa Ramez Mohamed LamineRodolphe SounouPas encore d'évaluation
- Naitali-EIGE452 - TD BG Système de Suspension PDFDocument3 pagesNaitali-EIGE452 - TD BG Système de Suspension PDFEl Ghafraoui100% (1)
- Expose Robot Suiveur de LigneDocument22 pagesExpose Robot Suiveur de LigneAchraf AlaouiPas encore d'évaluation
- Maintenance MERZOUGDocument46 pagesMaintenance MERZOUGNi halPas encore d'évaluation
- Fiche de TD Comportement Dynamique 2022Document15 pagesFiche de TD Comportement Dynamique 2022MVOULA ZoéPas encore d'évaluation
- Minimae PDFDocument5 pagesMinimae PDFSarah JijliPas encore d'évaluation
- Chapitre3 Robotique 2017Document45 pagesChapitre3 Robotique 2017imene titaPas encore d'évaluation
- Manuel SetratDocument27 pagesManuel SetratMajed AlkaptinPas encore d'évaluation
- Exercice de Sti Automatisme Bac BlancDocument12 pagesExercice de Sti Automatisme Bac Blancpapinou sarrPas encore d'évaluation
- Telematique CH 2 PDFDocument28 pagesTelematique CH 2 PDFikram nechbaPas encore d'évaluation
- Réalisation D'un Bras Manipulateur À Base D'arduino PrésentationDocument25 pagesRéalisation D'un Bras Manipulateur À Base D'arduino PrésentationMANAL ALILOUPas encore d'évaluation
- DistributeursDocument7 pagesDistributeursdayangPas encore d'évaluation
- Mémoire Bouzidi Et DerraouiDocument72 pagesMémoire Bouzidi Et Derraouihouyam hamdiPas encore d'évaluation
- TP3moulage ChariotDocument6 pagesTP3moulage ChariotJaouad ElPas encore d'évaluation
- Stage OuvrierDocument26 pagesStage Ouvrierkhaled beladPas encore d'évaluation
- Suiveur de Ligne PDFDocument20 pagesSuiveur de Ligne PDFBilel DekhiliPas encore d'évaluation
- Bras ManipulateurDocument34 pagesBras ManipulateurOussama AhakkarPas encore d'évaluation
- Catalogue 2016 E9.1 FR WebDocument277 pagesCatalogue 2016 E9.1 FR WebNicolas AguilarPas encore d'évaluation
- Devoir LibreDocument3 pagesDevoir LibreAbdessadek Elbachiri100% (1)
- Rapport P6-3 2009 17Document28 pagesRapport P6-3 2009 17Bilal FitsemPas encore d'évaluation
- Sujet Principal BTS SE-ELT-Productique-Mouliste SessionMai2014Document4 pagesSujet Principal BTS SE-ELT-Productique-Mouliste SessionMai2014yassine faradi100% (1)
- Asservissement D'un Robot ParallèleDocument10 pagesAsservissement D'un Robot ParallèlelaracorpPas encore d'évaluation
- Lobna Mi21Document35 pagesLobna Mi21khaledPas encore d'évaluation
- TP Maintennace Preventive Extrudicc-1Document17 pagesTP Maintennace Preventive Extrudicc-1Anonymous 9qKdViDP4Pas encore d'évaluation
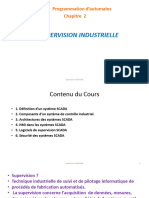
- La Supervision IndustrielleDocument65 pagesLa Supervision IndustrielleHoussem RadhouanePas encore d'évaluation
- Robotics Course DynamicsDocument30 pagesRobotics Course Dynamicshocine benmaizaPas encore d'évaluation
- Chapiter IDocument13 pagesChapiter IBouznad Houssem EddinePas encore d'évaluation
- Chapitre 1Document25 pagesChapitre 1Abdi ChakibPas encore d'évaluation
- Etude Et Conception D'une Machine de Grugeage Manuelle PDFDocument67 pagesEtude Et Conception D'une Machine de Grugeage Manuelle PDFRaouf HarzallahPas encore d'évaluation
- Tour CNCDocument1 pageTour CNCislamovicPas encore d'évaluation
- Compte RenduDocument12 pagesCompte RenduRayen Ab100% (1)
- TD Grafcet 2Document3 pagesTD Grafcet 2Anonymous Charon0% (1)
- Didactic Katalog 2015 FR StandDocument484 pagesDidactic Katalog 2015 FR StandElyas MghizriPas encore d'évaluation
- République Algérienne Démocratique Et PopulaireDocument10 pagesRépublique Algérienne Démocratique Et Populaireclouse12Pas encore d'évaluation
- Chimie (1) - CopieDocument9 pagesChimie (1) - Copietinhinane hadjouPas encore d'évaluation
- Le Dispositif Des Séries MPX2200 Et MPX2201 Est Un Capteur de Pression Piézorésistif Au SiliciumDocument5 pagesLe Dispositif Des Séries MPX2200 Et MPX2201 Est Un Capteur de Pression Piézorésistif Au Siliciumtinhinane hadjouPas encore d'évaluation
- Rapport de CapteurDocument17 pagesRapport de Capteurtinhinane hadjouPas encore d'évaluation
- Rapport de CapteurDocument17 pagesRapport de Capteurtinhinane hadjouPas encore d'évaluation
- Le Dispositif Des Séries MPX2200 Et MPX2201 Est Un Capteur de Pression Piézorésistif Au SiliciumDocument5 pagesLe Dispositif Des Séries MPX2200 Et MPX2201 Est Un Capteur de Pression Piézorésistif Au Siliciumtinhinane hadjouPas encore d'évaluation
- Automate GizzaneDocument3 pagesAutomate Gizzanetinhinane hadjouPas encore d'évaluation
- Courant Et Tension de SourceDocument1 pageCourant Et Tension de Sourcetinhinane hadjouPas encore d'évaluation
- Chimie (1) - CopieDocument9 pagesChimie (1) - Copietinhinane hadjouPas encore d'évaluation
- AutomateDocument72 pagesAutomatetinhinane hadjouPas encore d'évaluation
- Chapitre III PDFDocument14 pagesChapitre III PDFtinhinane hadjouPas encore d'évaluation
- 4eme-Systemes Automatises PDFDocument24 pages4eme-Systemes Automatises PDFHasibKaabiPas encore d'évaluation
- Les CapteursDocument47 pagesLes Capteursyoucef88Pas encore d'évaluation
- Ch7 MemoiresDocument52 pagesCh7 MemoiressinchicovichPas encore d'évaluation
- AsservNumPIDnum SatieEnsCachanDocument72 pagesAsservNumPIDnum SatieEnsCachanAna ElWedherfiPas encore d'évaluation
- Chapitre IIDocument10 pagesChapitre IItinhinane hadjouPas encore d'évaluation
- Application Form Original - FR 2Document2 pagesApplication Form Original - FR 2tinhinane hadjouPas encore d'évaluation
- Chapitre III PDFDocument14 pagesChapitre III PDFtinhinane hadjouPas encore d'évaluation
- Ghe5176 PDFDocument255 pagesGhe5176 PDFtinhinane hadjouPas encore d'évaluation
- Cours Connaissance Entreprise 080915 PDFDocument30 pagesCours Connaissance Entreprise 080915 PDFtinhinane hadjouPas encore d'évaluation
- Exercice SDocument33 pagesExercice SRehahlia Amine67% (3)
- Cours Sur Les AOPDocument9 pagesCours Sur Les AOPsdoulaj100% (1)
- Cours Connaissance Entreprise 080915 PDFDocument30 pagesCours Connaissance Entreprise 080915 PDFtinhinane hadjouPas encore d'évaluation
- IB IL 24 230 DOR4W-PAC Sortie FRDocument21 pagesIB IL 24 230 DOR4W-PAC Sortie FRtinhinane hadjouPas encore d'évaluation
- 2 Les Fonctions Du Marketing PDFDocument5 pages2 Les Fonctions Du Marketing PDFtinhinane hadjouPas encore d'évaluation
- Mini Projet Prceuse Indistrille PDFDocument25 pagesMini Projet Prceuse Indistrille PDFtinhinane hadjouPas encore d'évaluation
- 2 Les Fonctions Du Marketing PDFDocument5 pages2 Les Fonctions Du Marketing PDFtinhinane hadjouPas encore d'évaluation
- Mini Projet Prceuse Indistrille PDFDocument25 pagesMini Projet Prceuse Indistrille PDFtinhinane hadjouPas encore d'évaluation
- IB IL 24 DI 4-PAC Entré FRDocument10 pagesIB IL 24 DI 4-PAC Entré FRtinhinane hadjouPas encore d'évaluation
- Chapitre 1-ConvertiDocument22 pagesChapitre 1-Convertitinhinane hadjouPas encore d'évaluation
- Catalogue Rouleaux AnticolmatantDocument2 pagesCatalogue Rouleaux AnticolmatantSTANIPas encore d'évaluation
- REXROTH rf10098 - 2012-02Document28 pagesREXROTH rf10098 - 2012-02hocine gherbiPas encore d'évaluation
- Toto PL2017 Fra 170213Document52 pagesToto PL2017 Fra 170213Cong-Toan TranPas encore d'évaluation
- Automatismes Industriels: Exercice 1: Actions ConditionnellesDocument4 pagesAutomatismes Industriels: Exercice 1: Actions ConditionnellesWiame BouyoussefPas encore d'évaluation
- L3-API-chapitre 1 Cours 5Document31 pagesL3-API-chapitre 1 Cours 5ⵜⴻⴽⵔⴰⵏⴻ ⵙⵎⴰⴻⵍ100% (1)
- Peugeot 206 Manual de Taller19Document1 pagePeugeot 206 Manual de Taller19Sergio Hernandez0% (1)
- Ariston AVTF129 ManualDocument72 pagesAriston AVTF129 ManualSecondhand WonderlandPas encore d'évaluation
- 90 MCBDocument4 pages90 MCBmappy396458Pas encore d'évaluation
- Module1 1Document32 pagesModule1 1Mamadou SakhoPas encore d'évaluation
- Manuel CentralesDocument36 pagesManuel CentralesewanPas encore d'évaluation
- Catalogue 1-4Document200 pagesCatalogue 1-4GASTON-LABATPas encore d'évaluation
- Ua - Automatic Controller Installation ManualDocument48 pagesUa - Automatic Controller Installation ManualAngelo MacasPas encore d'évaluation
- Sommaire N 99Document2 pagesSommaire N 99adrarwalidPas encore d'évaluation
- Note - Utilisation EmbrayageDocument1 pageNote - Utilisation EmbrayageCalland olivierPas encore d'évaluation
- Peugeot 404 Documentation D'Atelier Et DerivesDocument3 pagesPeugeot 404 Documentation D'Atelier Et DerivesmrpPas encore d'évaluation
- dc1 2SC1 Leila 23-24Document4 pagesdc1 2SC1 Leila 23-24Arwa BerrichPas encore d'évaluation
- DS2 SiiDocument8 pagesDS2 SiiAHMED ghribiPas encore d'évaluation
- Cours Moteurs Asynchrones Bac Pro IndustrielDocument4 pagesCours Moteurs Asynchrones Bac Pro IndustrielBordeauxMeknesAlamesPas encore d'évaluation
- CAM685 FP FRDocument4 pagesCAM685 FP FRSidali KilardjPas encore d'évaluation
- Liste de Vérification D'une Installation ÉlectriqueDocument6 pagesListe de Vérification D'une Installation Électriquetafisco5505100% (3)
- 00 Ass MachineDocument6 pages00 Ass MachineazouaoufPas encore d'évaluation
- Cahier Des Charges Détaillé Du Système Domotique Avec Interface WebDocument13 pagesCahier Des Charges Détaillé Du Système Domotique Avec Interface WebAnouar BenlaqlibPas encore d'évaluation
- MotorDocument120 pagesMotorMirame Jaja100% (2)
- Le Transistor Bipolaire 2 Me InfoDocument5 pagesLe Transistor Bipolaire 2 Me InfoRiadh MarouaniPas encore d'évaluation
- Int - Fiche - Tech - Dynamique Rotor - 2013Document9 pagesInt - Fiche - Tech - Dynamique Rotor - 2013sarahrouPas encore d'évaluation
- Gabarit Polyvalent Multi-Assemblage v2.1Document35 pagesGabarit Polyvalent Multi-Assemblage v2.1Chaouki Ben jemaaPas encore d'évaluation
- Audi TTwiringdiagram-1658Document9 pagesAudi TTwiringdiagram-1658Jean-jacques BuquetPas encore d'évaluation
- Fin de Formation Epreuve 2Document9 pagesFin de Formation Epreuve 2Radouan EssabiraPas encore d'évaluation
- Cours Initiation Info L1 EtudiantsDocument72 pagesCours Initiation Info L1 EtudiantsYssah SerifouPas encore d'évaluation
- Support de Cours Microprocesseur Microcontroleur UICDocument137 pagesSupport de Cours Microprocesseur Microcontroleur UICmounirlekbouriuicPas encore d'évaluation
- Wireshark pour les débutants : Le guide ultime du débutant pour apprendre les bases de l’analyse réseau avec Wireshark.D'EverandWireshark pour les débutants : Le guide ultime du débutant pour apprendre les bases de l’analyse réseau avec Wireshark.Pas encore d'évaluation
- L'Art de la guerre: Traité de stratégie en 13 chapitres (texte intégral)D'EverandL'Art de la guerre: Traité de stratégie en 13 chapitres (texte intégral)Évaluation : 4 sur 5 étoiles4/5 (3032)
- Secrets du Marketing des Médias Sociaux 2021: Conseils et Stratégies Extrêmement Efficaces votre Facebook (Stimulez votre Engagement et Gagnez des Clients Fidèles)D'EverandSecrets du Marketing des Médias Sociaux 2021: Conseils et Stratégies Extrêmement Efficaces votre Facebook (Stimulez votre Engagement et Gagnez des Clients Fidèles)Évaluation : 4 sur 5 étoiles4/5 (2)
- L'analyse fondamentale facile à apprendre: Le guide d'introduction aux techniques et stratégies d'analyse fondamentale pour anticiper les événements qui font bouger les marchésD'EverandL'analyse fondamentale facile à apprendre: Le guide d'introduction aux techniques et stratégies d'analyse fondamentale pour anticiper les événements qui font bouger les marchésÉvaluation : 3.5 sur 5 étoiles3.5/5 (4)
- Comment analyser les gens : Introduction à l’analyse du langage corporel et les types de personnalité.D'EverandComment analyser les gens : Introduction à l’analyse du langage corporel et les types de personnalité.Pas encore d'évaluation
- Python | Programmer pas à pas: Le guide du débutant pour une initiation simple & rapide à la programmationD'EverandPython | Programmer pas à pas: Le guide du débutant pour une initiation simple & rapide à la programmationPas encore d'évaluation
- Hacking pour débutant Le guide ultime du débutant pour apprendre les bases du hacking avec Kali Linux et comment se protéger des hackersD'EverandHacking pour débutant Le guide ultime du débutant pour apprendre les bases du hacking avec Kali Linux et comment se protéger des hackersPas encore d'évaluation
- La vie des abeilles: Prix Nobel de littératureD'EverandLa vie des abeilles: Prix Nobel de littératureÉvaluation : 4 sur 5 étoiles4/5 (41)
- Piraté: Guide Ultime De Kali Linux Et De Piratage Sans Fil Avec Des Outils De Test De SécuritéD'EverandPiraté: Guide Ultime De Kali Linux Et De Piratage Sans Fil Avec Des Outils De Test De SécuritéPas encore d'évaluation
- Wi-Fi Hacking avec kali linux Guide étape par étape : apprenez à pénétrer les réseaux Wifi et les meilleures stratégies pour les sécuriserD'EverandWi-Fi Hacking avec kali linux Guide étape par étape : apprenez à pénétrer les réseaux Wifi et les meilleures stratégies pour les sécuriserPas encore d'évaluation
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsD'EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsÉvaluation : 5 sur 5 étoiles5/5 (1)
- WiFi Hacking : Le guide simplifié du débutant pour apprendre le hacking des réseaux WiFi avec Kali LinuxD'EverandWiFi Hacking : Le guide simplifié du débutant pour apprendre le hacking des réseaux WiFi avec Kali LinuxÉvaluation : 3 sur 5 étoiles3/5 (1)
- Hacking pour débutants : Le guide complet du débutant pour apprendre les bases du hacking avec Kali LinuxD'EverandHacking pour débutants : Le guide complet du débutant pour apprendre les bases du hacking avec Kali LinuxÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- Guide Pour Les Débutants En Matière De Piratage Informatique: Comment Pirater Un Réseau Sans Fil, Sécurité De Base Et Test De Pénétration, Kali LinuxD'EverandGuide Pour Les Débutants En Matière De Piratage Informatique: Comment Pirater Un Réseau Sans Fil, Sécurité De Base Et Test De Pénétration, Kali LinuxÉvaluation : 1 sur 5 étoiles1/5 (1)
- Manuel de fabrication du savon: Je fabrique mes savons facilementD'EverandManuel de fabrication du savon: Je fabrique mes savons facilementÉvaluation : 5 sur 5 étoiles5/5 (4)
- 101 idées pour travailler à domicile: Plus tous les conseils pour bien démarrerD'Everand101 idées pour travailler à domicile: Plus tous les conseils pour bien démarrerÉvaluation : 4.5 sur 5 étoiles4.5/5 (3)
- La communication professionnelle facile à apprendre: Le guide pratique de la communication professionnelle et des meilleures stratégies de communication d'entrepriseD'EverandLa communication professionnelle facile à apprendre: Le guide pratique de la communication professionnelle et des meilleures stratégies de communication d'entrepriseÉvaluation : 5 sur 5 étoiles5/5 (1)
- 160 ressources pour se lancer dans la vidéo quand on n’y connait rienD'Everand160 ressources pour se lancer dans la vidéo quand on n’y connait rienPas encore d'évaluation
- Approvisionnement et traitement de l’eau: Les Grands Articles d'UniversalisD'EverandApprovisionnement et traitement de l’eau: Les Grands Articles d'UniversalisPas encore d'évaluation
- NFT et Cryptoart: Le guide complet pour investir, créer et vendre avec succès des jetons non fongibles sur le marché de l'art numériqueD'EverandNFT et Cryptoart: Le guide complet pour investir, créer et vendre avec succès des jetons non fongibles sur le marché de l'art numériqueÉvaluation : 5 sur 5 étoiles5/5 (5)
- Créer Son Propre Site Internet Et Son Blog GratuitementD'EverandCréer Son Propre Site Internet Et Son Blog GratuitementÉvaluation : 5 sur 5 étoiles5/5 (1)
- Explication De La Technologie Blockchain: Guide Ultime Du Débutant Au Sujet Du Portefeuille Blockchain, Mines, Bitcoin, Ripple, EthereumD'EverandExplication De La Technologie Blockchain: Guide Ultime Du Débutant Au Sujet Du Portefeuille Blockchain, Mines, Bitcoin, Ripple, EthereumPas encore d'évaluation
- Le trading en ligne facile à apprendre: Comment devenir un trader en ligne et apprendre à investir avec succèsD'EverandLe trading en ligne facile à apprendre: Comment devenir un trader en ligne et apprendre à investir avec succèsÉvaluation : 3.5 sur 5 étoiles3.5/5 (19)
- Kali Linux pour débutant : Le guide ultime du débutant pour apprendre les bases de Kali Linux.D'EverandKali Linux pour débutant : Le guide ultime du débutant pour apprendre les bases de Kali Linux.Évaluation : 5 sur 5 étoiles5/5 (1)
- Création d'une start-up à succès de A à Z: Réussir votre Start-up 2.0 Web et MobileD'EverandCréation d'une start-up à succès de A à Z: Réussir votre Start-up 2.0 Web et MobileÉvaluation : 3.5 sur 5 étoiles3.5/5 (4)
- Le guide du hacker : le guide simplifié du débutant pour apprendre les bases du hacking avec Kali LinuxD'EverandLe guide du hacker : le guide simplifié du débutant pour apprendre les bases du hacking avec Kali LinuxÉvaluation : 5 sur 5 étoiles5/5 (2)