Vous aimerez peut-être aussi
- Chaines Des SolidesDocument9 pagesChaines Des SolidesFree FirePas encore d'évaluation
- 2 HyperstatismeDocument9 pages2 HyperstatismeMaha HammamiPas encore d'évaluation
- Cours - Suite de La Statique + CH (III) Cinématique Du Solide P.FDocument15 pagesCours - Suite de La Statique + CH (III) Cinématique Du Solide P.FMeroua LounaoussiPas encore d'évaluation
- 01 - Vecteur Et Torseur en MecaniqueDocument12 pages01 - Vecteur Et Torseur en MecaniqueBelgacem Hamdi100% (1)
- TD4 - Analyse Des Systèmes Mécaniques (1) - CopieDocument3 pagesTD4 - Analyse Des Systèmes Mécaniques (1) - CopieReda KabelPas encore d'évaluation
- Cours Engrenages 2019-2020 Bis - CopieDocument42 pagesCours Engrenages 2019-2020 Bis - CopieEl Aziz El Mehdi100% (1)
- MPSI-Mecanique-Cinematique AnalytiqueDocument27 pagesMPSI-Mecanique-Cinematique AnalytiqueimadPas encore d'évaluation
- Theorie Des MecanismesDocument20 pagesTheorie Des Mecanismesebey_endunPas encore d'évaluation
- TD Cinématique Roulement Sans GlissementDocument3 pagesTD Cinématique Roulement Sans GlissementimadPas encore d'évaluation
- Chap1 Etude de MouvementsDocument4 pagesChap1 Etude de MouvementsKhaoula KhemiliPas encore d'évaluation
- TD Meca Fluide PCDocument50 pagesTD Meca Fluide PCHeba BkPas encore d'évaluation
- Résumé CinétiqueDocument11 pagesRésumé CinétiqueAB lifestylePas encore d'évaluation
- Rappel Calcul VectorielDocument24 pagesRappel Calcul VectorielYassine EdahbiPas encore d'évaluation
- MEC3 MobiliteDocument7 pagesMEC3 Mobiliter_prePas encore d'évaluation
- Recueil Exam Meca Flu PDFDocument26 pagesRecueil Exam Meca Flu PDFĶhadija KhadijaPas encore d'évaluation
- TD N°2 Cinématique Du Solide Composition Des Vitesses Torseur CinématiqueDocument4 pagesTD N°2 Cinématique Du Solide Composition Des Vitesses Torseur CinématiquemzoughiPas encore d'évaluation
- Exercices de DYNAMIQUE de RotationDocument13 pagesExercices de DYNAMIQUE de RotationYassir RochdPas encore d'évaluation
- Pertes de Charge SyntheseDocument4 pagesPertes de Charge SyntheseDhikrane NafaaPas encore d'évaluation
- TpChaineSolides CorrigéDocument9 pagesTpChaineSolides CorrigéImen HammoudaPas encore d'évaluation
- Systemes MecaniquesDocument6 pagesSystemes MecaniquesCheikh Abdoul Hakim BABOUPas encore d'évaluation
- Cinématique - DM - Genie Indus - VFDocument2 pagesCinématique - DM - Genie Indus - VFFahd LahmidiPas encore d'évaluation
- TD 24 - Modlisation Des AM de Contact Surfacique - Lois de CoulombDocument4 pagesTD 24 - Modlisation Des AM de Contact Surfacique - Lois de CoulombChayma GueddariPas encore d'évaluation
- Cours Thèorie Des Mécanismes (CI - GOI-DFMI) 19-20Document28 pagesCours Thèorie Des Mécanismes (CI - GOI-DFMI) 19-20Abderrahmane Ben ErajrajiPas encore d'évaluation
- Capteurs TachymetriqueDocument16 pagesCapteurs TachymetriqueMichel AchkarPas encore d'évaluation
- Chapitre 1: Statique Des FluidesDocument26 pagesChapitre 1: Statique Des FluidesBrahim MouhcinePas encore d'évaluation
- Modelisation Des MOCNDocument14 pagesModelisation Des MOCNBouguerraAzou0% (1)
- CH-6 - Ecoulements Internes - Ecoulements en ConduitesDocument35 pagesCH-6 - Ecoulements Internes - Ecoulements en Conduitessoundous mahmahPas encore d'évaluation
- Indicateurs de Performance en MaintenanceDocument76 pagesIndicateurs de Performance en MaintenancebtkmouadPas encore d'évaluation
- Cours Hyperstatique TempoDocument5 pagesCours Hyperstatique TempoSCORSAM1Pas encore d'évaluation
- Schéma CinématiqueDocument23 pagesSchéma CinématiqueRuroni100% (1)
- Chapitre 4 CinematiqueDocument19 pagesChapitre 4 CinematiqueAbeka Kader100% (1)
- Recueil D' Épreuves DUT-BTS Mécanique - 2003Document19 pagesRecueil D' Épreuves DUT-BTS Mécanique - 2003Bradley CasePas encore d'évaluation
- 00 2STE Complet - 2021 2022Document38 pages00 2STE Complet - 2021 2022Touriya MoukhlesPas encore d'évaluation
- Transmission de puissance-FF01Document92 pagesTransmission de puissance-FF01AYA OUEZGANPas encore d'évaluation
- Note - Cours - Geometrie Des MassesDocument17 pagesNote - Cours - Geometrie Des Masseswilliandry NDJEWEPas encore d'évaluation
- Rachid Mesrar Appli Centre InertieDocument5 pagesRachid Mesrar Appli Centre InertieHouria Ben100% (1)
- CI05 TD14 Corrigé - Déterminer Le Modèle de Connaissance D - Un Système Asservi PerturbéDocument8 pagesCI05 TD14 Corrigé - Déterminer Le Modèle de Connaissance D - Un Système Asservi PerturbéKhaled JberiPas encore d'évaluation
- Cinématique - MVT Cycloidale - CorrigéDocument1 pageCinématique - MVT Cycloidale - CorrigéMbaira LeilaPas encore d'évaluation
- Cinematique Insa TD 2017 2018Document12 pagesCinematique Insa TD 2017 2018LudovicPas encore d'évaluation
- SiteEnoncé TD1 MecaDocument5 pagesSiteEnoncé TD1 Mecaromario marioPas encore d'évaluation
- Cours de Vibrations 2022 Chapitre 2Document21 pagesCours de Vibrations 2022 Chapitre 2koruko basketPas encore d'évaluation
- Cours CINEMATIQUE DES SOLIDESDocument22 pagesCours CINEMATIQUE DES SOLIDESTalel MissaouiPas encore d'évaluation
- TP 2 Solidworks Liaisons Dans Les Mecanismes p1Document8 pagesTP 2 Solidworks Liaisons Dans Les Mecanismes p1Simo StitPas encore d'évaluation
- Cours Meca Des FluidesDocument13 pagesCours Meca Des Fluidesfprudhom100% (1)
- MODELISATION CINEMATIQUE COURS SI PC 2018-2019 (Él.)Document10 pagesMODELISATION CINEMATIQUE COURS SI PC 2018-2019 (Él.)Andreas NGASTE100% (1)
- Chapitre Geométrie de MasseDocument26 pagesChapitre Geométrie de MasseNEXOPas encore d'évaluation
- Modélisation Géométrique de LiaisonsDocument37 pagesModélisation Géométrique de LiaisonsAyoüb Sou UadPas encore d'évaluation
- Séq 01 - TP2 Réducteur Roue Et Vis Sans Fin Idem Bts 2 Séq 10Document6 pagesSéq 01 - TP2 Réducteur Roue Et Vis Sans Fin Idem Bts 2 Séq 10abdelhakim kheloufiPas encore d'évaluation
- Ci5 TD Mecanisme CameDocument1 pageCi5 TD Mecanisme Cameleroy makita loubakiPas encore d'évaluation
- Mécanique1 VERSION1Document91 pagesMécanique1 VERSION1nftlPas encore d'évaluation
- tp02 CardanDocument6 pagestp02 CardanSerge SoursouPas encore d'évaluation
- TD Borne de Reglage EleveDocument6 pagesTD Borne de Reglage EleveDJ-NONO-88 emilioPas encore d'évaluation
- Analyse Fonctionnelle 2021 PDFDocument7 pagesAnalyse Fonctionnelle 2021 PDFOuechtati MounirPas encore d'évaluation
- MECANIQUE RATIONNELLE BachelierDocument193 pagesMECANIQUE RATIONNELLE BachelierIdriss Jr MukalaPas encore d'évaluation
- Chapitre 3Document57 pagesChapitre 3Oussama AbirPas encore d'évaluation
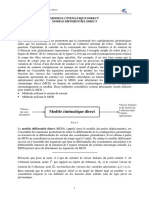
- Modèle Cinématique DirectDocument7 pagesModèle Cinématique DirectsiamPas encore d'évaluation
- Cours Robotique - Chap - CinematiqueDocument19 pagesCours Robotique - Chap - CinematiqueOmar 95Pas encore d'évaluation
- Lecture 4-Cinématique Inverse-PositionDocument12 pagesLecture 4-Cinématique Inverse-Positioninesboumaiza293Pas encore d'évaluation
- Sma Rma Ch08-V01 ModcindirDocument22 pagesSma Rma Ch08-V01 Modcindiragrebi mohamedPas encore d'évaluation
- Robotique Mini ProjetDocument6 pagesRobotique Mini ProjetChahinez Moates0% (1)
- Adouane Modelisation Rob TP PresentationDocument11 pagesAdouane Modelisation Rob TP PresentationNizar ChellyPas encore d'évaluation
- INFO2 coursTD 7 EtudiantDocument8 pagesINFO2 coursTD 7 EtudiantNizar ChellyPas encore d'évaluation
- 4 Principe Du CD-2Document2 pages4 Principe Du CD-2Nizar ChellyPas encore d'évaluation
- Asservis NumDocument11 pagesAsservis NumNizar ChellyPas encore d'évaluation
- Tp2 Regulation NumeriqueDocument7 pagesTp2 Regulation NumeriqueNizar Chelly100% (3)
- ChaptIV Plasticité 2 3D Mars Avril E 2020 29avril2020 FinaleDocument23 pagesChaptIV Plasticité 2 3D Mars Avril E 2020 29avril2020 Finaleramzi abidiPas encore d'évaluation
- Cour Champ Magnetique F 2020 1BIOF PDFDocument3 pagesCour Champ Magnetique F 2020 1BIOF PDFHAMADA1972Pas encore d'évaluation
- ElectroMagnétisme-Contrôle-n-1-avec-Correction-2009-2010 by RayDocument12 pagesElectroMagnétisme-Contrôle-n-1-avec-Correction-2009-2010 by Raykurts010Pas encore d'évaluation
- La Voie Du Mage - Bien Debuter - Arnaud ThulyDocument267 pagesLa Voie Du Mage - Bien Debuter - Arnaud ThulyGiom Ly100% (8)
- TP Les Grandeurs de FresnelDocument9 pagesTP Les Grandeurs de Fresnelnawzat100% (1)
- Cours de Chimie - 2018-2019Document74 pagesCours de Chimie - 2018-2019comboudriPas encore d'évaluation
- Corrige 1Document7 pagesCorrige 1M YacinePas encore d'évaluation
- Sujet BTS MAI 2011Document9 pagesSujet BTS MAI 2011Bohwa ParkPas encore d'évaluation
- TP TRANSFERT ConductionDocument11 pagesTP TRANSFERT Conductionmerwa sefir100% (3)
- Serie IonDocument2 pagesSerie IonMounira MabroukiPas encore d'évaluation
- Chimie Chapitres 6-7Document2 pagesChimie Chapitres 6-7Marika MontminyPas encore d'évaluation
- Ansi c37.32-1996Document1 pageAnsi c37.32-1996Addin Ruano100% (1)
- Polycopie - Bouhellala Kharfia1Document59 pagesPolycopie - Bouhellala Kharfia1BelloPas encore d'évaluation
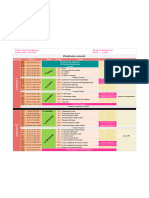
- Planification Annuelle 1AC 2022Document1 pagePlanification Annuelle 1AC 2022aziz makhloufPas encore d'évaluation
- MDF Licence Gpid Oid Part 1Document85 pagesMDF Licence Gpid Oid Part 1SalOua SaMy ShPas encore d'évaluation
- Poussée Et ButéeDocument33 pagesPoussée Et Butéebouayed67% (3)
- CCP Psi 2012 SujetDocument32 pagesCCP Psi 2012 SujetCristioano DakPas encore d'évaluation
- Sujet N°3 SP Tle DDocument4 pagesSujet N°3 SP Tle Dguebi daniel akagboPas encore d'évaluation
- Travaux Dirigés N°1: Matière: Réseaux Radio-Mobiles Cellulaires Filière: RT3 Enseignante: Mériem AfifDocument4 pagesTravaux Dirigés N°1: Matière: Réseaux Radio-Mobiles Cellulaires Filière: RT3 Enseignante: Mériem AfifHamdi GdhamiPas encore d'évaluation
- Cours Regime SinusDocument10 pagesCours Regime SinusRabah Amidi100% (1)
- MD Energie MécaniqueDocument8 pagesMD Energie MécaniqueAbdallah El HajjPas encore d'évaluation
- Amplificateur OptiqueDocument6 pagesAmplificateur OptiqueÃd ELPas encore d'évaluation
- Enac 2020 eDocument6 pagesEnac 2020 erestitutor sophiaePas encore d'évaluation
- Cours de Mécanique Du Solide - Pr. EL AFIF 17-18Document87 pagesCours de Mécanique Du Solide - Pr. EL AFIF 17-18Ahmed GAMINGPas encore d'évaluation
- Exposé Numérisé D'optique GéométriqueDocument25 pagesExposé Numérisé D'optique GéométriqueRobert BrouPas encore d'évaluation
- MVA101-Final2011 CorrectionDocument6 pagesMVA101-Final2011 CorrectionPeter El BabaPas encore d'évaluation
- COURS-les Lois de KeplerDocument1 pageCOURS-les Lois de KeplerMiriam100% (1)
- Session Intensive 2 TleC 2023 PDFDocument4 pagesSession Intensive 2 TleC 2023 PDFESSOME ESSOME OLIVIER STEPHANEPas encore d'évaluation
- Bilasse Massamaesso SMZ1032Document222 pagesBilasse Massamaesso SMZ1032doria ghennaiPas encore d'évaluation
- Aménagement Des Ouvrages HydrauliquesDocument200 pagesAménagement Des Ouvrages HydrauliquesEnoch KazimotoPas encore d'évaluation