Vous aimerez peut-être aussi
- Ex Ef Assem Barres TreillisDocument7 pagesEx Ef Assem Barres Treillisسيف الدين يعقوبيPas encore d'évaluation
- Force Exercée Par Un Jet Sur Un Obstacle: 1. ObjectifDocument9 pagesForce Exercée Par Un Jet Sur Un Obstacle: 1. ObjectifMoslem Zariat100% (1)
- M05 - Installation Des Canalisations Électriques GE-EB PDFDocument45 pagesM05 - Installation Des Canalisations Électriques GE-EB PDFzakariasolo100% (3)
- Correction TD 2Document40 pagesCorrection TD 2elhaoudar.nassimaPas encore d'évaluation
- Exercice 1Document4 pagesExercice 1MrMrSnB 30Pas encore d'évaluation
- Fiche Chaines de SolidesDocument7 pagesFiche Chaines de Solidesayoub elPas encore d'évaluation
- Mouvements de Particules Chargees: Dans Les Champs Electrique Et MagnetiqueDocument4 pagesMouvements de Particules Chargees: Dans Les Champs Electrique Et MagnetiqueHmd SidiPas encore d'évaluation
- Exo 06 07 Corrige Chaines OuvertesDocument4 pagesExo 06 07 Corrige Chaines OuvertesAyoubPas encore d'évaluation
- TD1 Antenne 1-1Document9 pagesTD1 Antenne 1-1hania abbaPas encore d'évaluation
- Cours N°9 - (Monostables)Document6 pagesCours N°9 - (Monostables)gg91100% (2)
- CNC MpsiDocument2 pagesCNC MpsiAbdelali YacoubiPas encore d'évaluation
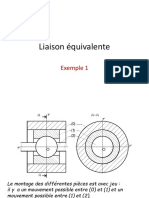
- TD N°2 Liaisons Équivalentes en Séries - ROTULE - Pivot GlissantDocument9 pagesTD N°2 Liaisons Équivalentes en Séries - ROTULE - Pivot GlissantEasy Online ServicesPas encore d'évaluation
- Révision CPLT Elec Juillet 2015Document5 pagesRévision CPLT Elec Juillet 2015DominoHevyPas encore d'évaluation
- Chap Vi Condensateur Respo-AnsuDocument4 pagesChap Vi Condensateur Respo-AnsuKane MamadouPas encore d'évaluation
- TP4 Couplage de Transformateur TriphasDocument7 pagesTP4 Couplage de Transformateur Triphasnassimzouane2015Pas encore d'évaluation
- Cours Chap1 Notions BaseDocument37 pagesCours Chap1 Notions BaseRodriguePas encore d'évaluation
- Analyse Des MécanismesDocument10 pagesAnalyse Des MécanismesMohamed EddriefPas encore d'évaluation
- TD4 EM 2022 Partie1Document4 pagesTD4 EM 2022 Partie1Ell ImPas encore d'évaluation
- Sec CCP 2001 Phy2c MPDocument8 pagesSec CCP 2001 Phy2c MPEl Amrani WassimPas encore d'évaluation
- Sujet MR CorrigéDocument6 pagesSujet MR Corrigéasmaberkaine0Pas encore d'évaluation
- Série 6Document6 pagesSérie 6omar elmazriaPas encore d'évaluation
- Chapitre - 4 - Potentiel Électrique - ES4 PDFDocument25 pagesChapitre - 4 - Potentiel Électrique - ES4 PDFOlivier PravazPas encore d'évaluation
- Les Foncions Logiques 2010 2011 (Anais)Document4 pagesLes Foncions Logiques 2010 2011 (Anais)alagsm gsmPas encore d'évaluation
- Exercices EnoncésA Transfo.2ph Ibti - RachDocument7 pagesExercices EnoncésA Transfo.2ph Ibti - RachKaparoNedMarPas encore d'évaluation
- TD SMAS5 Serie4 - 2019 Correction - 2pDocument20 pagesTD SMAS5 Serie4 - 2019 Correction - 2pk.mkami211Pas encore d'évaluation
- Exo 2 Pompe Hydraulique CorrigeDocument4 pagesExo 2 Pompe Hydraulique Corrigeesloch100% (1)
- Principes & Méthodes Statistiques: F.Ghorbel & O.Oueslati & K.B. Mbarek & A. AlleliDocument1 pagePrincipes & Méthodes Statistiques: F.Ghorbel & O.Oueslati & K.B. Mbarek & A. AlleliSirPas encore d'évaluation
- Cinématique - DM - Genie Indus - VFDocument2 pagesCinématique - DM - Genie Indus - VFFahd LahmidiPas encore d'évaluation
- CHAP III Marche en ParalleleDocument6 pagesCHAP III Marche en ParalleleFaicel Mejri100% (1)
- Devoir de Plasticité 2020 - Enoncé+CorrigéDocument16 pagesDevoir de Plasticité 2020 - Enoncé+CorrigéGuefrech khail100% (1)
- TD Regime TransitoireDocument4 pagesTD Regime Transitoirefsabdo7Pas encore d'évaluation
- AmplidifDocument8 pagesAmplidifJalel KhediriPas encore d'évaluation
- Devoir 5 SM Biof Arsalan PDFDocument3 pagesDevoir 5 SM Biof Arsalan PDFMed BriniPas encore d'évaluation
- Calcul TensorielDocument2 pagesCalcul TensorielRAHMA ABDELLIPas encore d'évaluation
- Sujet MMDocument10 pagesSujet MMJordan TADONBOUPas encore d'évaluation
- Electromag Pcgi2 ch6Document34 pagesElectromag Pcgi2 ch6Mohamed SaidiPas encore d'évaluation
- Cnam UTC103 RésistanceDesMatériaux Chapitre15Document25 pagesCnam UTC103 RésistanceDesMatériaux Chapitre15Takanori YasudaPas encore d'évaluation
- 4 - B - Condensateurs - EtudiantDocument10 pages4 - B - Condensateurs - EtudiantSi Møhamed HMPas encore d'évaluation
- CM ch2 Ondes ElectromagnétiqueDocument6 pagesCM ch2 Ondes ElectromagnétiqueAhamada AnisPas encore d'évaluation
- 11 - Cinematique Liaisons EquivalentesDocument19 pages11 - Cinematique Liaisons Equivalentessaded05Pas encore d'évaluation
- Element Finis PDFDocument9 pagesElement Finis PDFAmine NaitPas encore d'évaluation
- Vis EcrouDocument8 pagesVis EcrouAsma MoussaPas encore d'évaluation
- CC DiodesDocument3 pagesCC DiodesDounia EnnaciriPas encore d'évaluation
- TP 1GEL AOP SatDocument3 pagesTP 1GEL AOP SatBlack BleachPas encore d'évaluation
- Ravaux Irigés: y E U XDocument4 pagesRavaux Irigés: y E U XCheujeu chaldouPas encore d'évaluation
- Corrigé Examen BarèmeDocument6 pagesCorrigé Examen Barèmesemchaachraf94Pas encore d'évaluation
- Chap 5Document25 pagesChap 5yosr magmaguiPas encore d'évaluation
- 2019 2P021 7 ForcesMagnétiques Et DipolesDocument20 pages2019 2P021 7 ForcesMagnétiques Et DipolesBonkoungou AlainPas encore d'évaluation
- Deux Oscillateurs Couples PDFDocument3 pagesDeux Oscillateurs Couples PDFHazy UrcanPas encore d'évaluation
- Corrigé-Sujet 1-Electronique - L3 SP-U MAN-19-20Document3 pagesCorrigé-Sujet 1-Electronique - L3 SP-U MAN-19-20Harvey Specter100% (1)
- Série de TDDocument5 pagesSérie de TDYoussra DjePas encore d'évaluation
- Circuits Couples Par Mutuelle InductanceDocument7 pagesCircuits Couples Par Mutuelle InductanceMalick DiopPas encore d'évaluation
- Série D'exercices - Technologie Les Foncions Logiques - 1ère AS (2010-2011) Mlle AnaisDocument4 pagesSérie D'exercices - Technologie Les Foncions Logiques - 1ère AS (2010-2011) Mlle AnaisSofianePas encore d'évaluation
- Semestre 2 DS 4 2013-2014 Melangeur de Peinture - OdtDocument9 pagesSemestre 2 DS 4 2013-2014 Melangeur de Peinture - OdtAbdelali YacoubiPas encore d'évaluation
- Ondes Chapitre 06Document12 pagesOndes Chapitre 06Ali OucharPas encore d'évaluation
- TD2 MQ1 2019-20Document15 pagesTD2 MQ1 2019-20Hasan Elmoumni100% (1)
- TD2Document5 pagesTD2El Mehdi Echebba50% (2)
- DS06 Dynamique Lorentz CorrigeDocument10 pagesDS06 Dynamique Lorentz Corrigedidier denisPas encore d'évaluation
- DocumentDocument19 pagesDocumentmoulay abdallahPas encore d'évaluation
- Seance 3Document43 pagesSeance 3Moslem ZariatPas encore d'évaluation
- Seance 2Document31 pagesSeance 2Moslem ZariatPas encore d'évaluation
- These Emboutissage IncrémentalDocument147 pagesThese Emboutissage IncrémentalMoslem ZariatPas encore d'évaluation
- Seance 5Document19 pagesSeance 5Moslem ZariatPas encore d'évaluation
- Seance 1Document18 pagesSeance 1Moslem ZariatPas encore d'évaluation
- td1 Ver1Document2 pagestd1 Ver1Moslem ZariatPas encore d'évaluation
- TD 2 SimplexeDocument2 pagesTD 2 SimplexeMoslem ZariatPas encore d'évaluation
- Chaître 2 SimplexeDocument39 pagesChaître 2 SimplexeMoslem ZariatPas encore d'évaluation
- td1 Ver2Document3 pagestd1 Ver2Moslem ZariatPas encore d'évaluation
- TP Dualité LingoDocument3 pagesTP Dualité LingoMoslem ZariatPas encore d'évaluation
- Correction Td1 Ver1Document6 pagesCorrection Td1 Ver1Moslem ZariatPas encore d'évaluation
- Chap 3 DualitéDocument23 pagesChap 3 DualitéMoslem ZariatPas encore d'évaluation
- CAM - Méc de Trans. de MVTDocument33 pagesCAM - Méc de Trans. de MVTMoslem ZariatPas encore d'évaluation
- CAM - Rappel Sur Les Liaisons Mécaniques 1Document20 pagesCAM - Rappel Sur Les Liaisons Mécaniques 1Moslem ZariatPas encore d'évaluation
- Guidage Central 1207Document4 pagesGuidage Central 1207Claudine ElisseevPas encore d'évaluation
- Ferrovissime 2020 11 12Document84 pagesFerrovissime 2020 11 12Joseph FazioPas encore d'évaluation
- Climatiseur 20splitDocument11 pagesClimatiseur 20splitBaghdadi AbdelillahPas encore d'évaluation
- Memoire Skiribou KnadelDocument40 pagesMemoire Skiribou KnadelIdriss Knadel100% (1)
- Cours Montage Des Roulements1Document2 pagesCours Montage Des Roulements1Guy EffaPas encore d'évaluation
- Xps Ac Doc CablageDocument1 pageXps Ac Doc CablageThierry LAMBOTTEPas encore d'évaluation
- Matériauw PDFDocument194 pagesMatériauw PDFKàoutarAllabouchePas encore d'évaluation
- MemoireDocument110 pagesMemoiremouloudbelh54Pas encore d'évaluation
- TP N2 ClassificationDocument7 pagesTP N2 ClassificationIbrahimRouabahPas encore d'évaluation
- Les Cycles Fixes D'usinageDocument9 pagesLes Cycles Fixes D'usinageEganfack Tabougue Lyns LeonnelPas encore d'évaluation
- Catalogue - Stabox, GoujonDocument104 pagesCatalogue - Stabox, GoujonymitevPas encore d'évaluation
- Connaître La Date de Fabrication D'une Batterie DDocument1 pageConnaître La Date de Fabrication D'une Batterie DNkongo NkusuPas encore d'évaluation
- Presentation Stage GNLDocument24 pagesPresentation Stage GNLSal Azar100% (1)
- Lecture Schema Electrique BepDocument4 pagesLecture Schema Electrique BepMBIA FIDELIN YVES100% (2)
- Cahier Des Charges Technique PDFDocument5 pagesCahier Des Charges Technique PDFDominique AngoaPas encore d'évaluation
- Horowitz Horror Stories You'll Wish You Never Read (PDFDrive)Document116 pagesHorowitz Horror Stories You'll Wish You Never Read (PDFDrive)martinduval348Pas encore d'évaluation
- Manuel de Conception Des Scripts V1.2.xDocument30 pagesManuel de Conception Des Scripts V1.2.xاليزيد بن توهاميPas encore d'évaluation
- CorrigéDocument4 pagesCorrigéjaadane.fatimazahra8Pas encore d'évaluation
- SSR 2015-16 ElectricalDocument1 901 pagesSSR 2015-16 ElectricalVenkataLakshmiKorrapatiPas encore d'évaluation
- Manuel Samsung B2710Document88 pagesManuel Samsung B2710Tuxetech TuxPas encore d'évaluation
- Rapport D'avarie PDFDocument11 pagesRapport D'avarie PDFkahl98367% (3)
- Les Nombres AdimensionnelsDocument4 pagesLes Nombres AdimensionnelsCyrille Kontchou KamdoumPas encore d'évaluation
- Doseur2 PDFDocument35 pagesDoseur2 PDFOussama EljaafariPas encore d'évaluation
- Les Dalles Rectangulaires13Document8 pagesLes Dalles Rectangulaires13Hamza AbidiPas encore d'évaluation
- Thème 1 SVT: Activités Internes de La TerreDocument9 pagesThème 1 SVT: Activités Internes de La TerreMayaPas encore d'évaluation
- Stabilité Des Pentes PDFDocument15 pagesStabilité Des Pentes PDFDY SAXPas encore d'évaluation
- Gestion de La MemoireDocument12 pagesGestion de La MemoireFadwa ZedPas encore d'évaluation
- Cours EPFC-6 - UVDocument7 pagesCours EPFC-6 - UVIheb AlkahatPas encore d'évaluation
- AOP Non LineaireDocument3 pagesAOP Non LineaireMohamed Ali TaheurPas encore d'évaluation