Vous aimerez peut-être aussi
- Programme Tle CeDocument9 pagesProgramme Tle CeTOPASOPas encore d'évaluation
- 3 Introduction EFDocument33 pages3 Introduction EFMohamed EL Haddi AbidiPas encore d'évaluation
- CTD EfDocument48 pagesCTD EfThomas RaffestinPas encore d'évaluation
- TD Reduction Des EndomorphismesDocument2 pagesTD Reduction Des EndomorphismesAbdel GansonrePas encore d'évaluation
- Exam Simu EM 19sat AreDocument2 pagesExam Simu EM 19sat ArebulenstimothePas encore d'évaluation
- Chapitre 2 - Homogénéisation - KM - 2AGCDocument30 pagesChapitre 2 - Homogénéisation - KM - 2AGCIheb DerwichPas encore d'évaluation
- Emailing Modélisation - Robot - PUMADocument18 pagesEmailing Modélisation - Robot - PUMAKhadari AbdelmalekPas encore d'évaluation
- 3 TD Non CorDocument2 pages3 TD Non CorJn Kinsonn TelcyPas encore d'évaluation
- Réponse Transitoire D'un Réseau de Terre Simple Géométrie - Cas D PDFDocument6 pagesRéponse Transitoire D'un Réseau de Terre Simple Géométrie - Cas D PDFMendel Abi FimboPas encore d'évaluation
- Elasticite LineaireDocument112 pagesElasticite LineairecompessaiPas encore d'évaluation
- Methode Num Janvier 2010Document6 pagesMethode Num Janvier 2010s18297906Pas encore d'évaluation
- Les Rappels Mathématiques - Cours - Mecanique de Solide - MIPC (S4) - FSTT - 2021Document12 pagesLes Rappels Mathématiques - Cours - Mecanique de Solide - MIPC (S4) - FSTT - 2021Najoua RaguaniPas encore d'évaluation
- MMC Chapitre 1 EstemDocument23 pagesMMC Chapitre 1 Estemmehdi HEDDAJPas encore d'évaluation
- 2022 2023 TD1 Methode Des Elements Finis IEM2S3 IGC2S3Document10 pages2022 2023 TD1 Methode Des Elements Finis IEM2S3 IGC2S3Thamar GomaPas encore d'évaluation
- MG00Document6 pagesMG00Jean HurtePas encore d'évaluation
- 1309 ZebulonJuin12 ERouhaudDocument24 pages1309 ZebulonJuin12 ERouhaudFongho Eric SinclairPas encore d'évaluation
- Espaces Vectoriels Cours Et Exercices CorrigesDocument12 pagesEspaces Vectoriels Cours Et Exercices Corrigesmoha.elayadyPas encore d'évaluation
- Corrige de Exo1 - Serie 2 - Calcul Des Structures - 2020 - 2021Document45 pagesCorrige de Exo1 - Serie 2 - Calcul Des Structures - 2020 - 2021somaya ehPas encore d'évaluation
- PPHY01Document102 pagesPPHY01gislaincarden kamtakwapnangPas encore d'évaluation
- 22 23 Algebre3 td5Document2 pages22 23 Algebre3 td5Alaimi SeifPas encore d'évaluation
- TP Grade 1 Elm Groupe 1 - 065630Document23 pagesTP Grade 1 Elm Groupe 1 - 065630Bodrick KAHOZIPas encore d'évaluation
- fg031 Chapitre 19 Integrales COURSDocument11 pagesfg031 Chapitre 19 Integrales COURSZouhair BougarnePas encore d'évaluation
- PSI PHYSIQUE MINES 2 2018.enonceDocument9 pagesPSI PHYSIQUE MINES 2 2018.enonceromain.r.3001Pas encore d'évaluation
- Evn Costantini PDFDocument12 pagesEvn Costantini PDFanon_441994392Pas encore d'évaluation
- CHP 1 PH Partie1Document4 pagesCHP 1 PH Partie1Ahmed TribakPas encore d'évaluation
- Method Edes Elements FinisDocument66 pagesMethod Edes Elements FinisRi HamPas encore d'évaluation
- CoursPHY110 4Document5 pagesCoursPHY110 4Gayo EntrepreneurPas encore d'évaluation
- Portiques RDM PDFDocument10 pagesPortiques RDM PDFAnonymous ww55t9C100% (1)
- Ecoulement Orifice FluideDocument24 pagesEcoulement Orifice FluideWael BadriPas encore d'évaluation
- Fentes de YoungDocument8 pagesFentes de YoungDiane KamningPas encore d'évaluation
- Intelligence Artificielle 3Document113 pagesIntelligence Artificielle 3Allegro Presto Moderato100% (1)
- CC2 - Calcul Des Structures 2017 - 2018Document2 pagesCC2 - Calcul Des Structures 2017 - 2018Aya ChikerPas encore d'évaluation
- Ds Cinématique-Dynamique - Changement de Ref Mpsi3dyudjtjkxhhjdDocument2 pagesDs Cinématique-Dynamique - Changement de Ref Mpsi3dyudjtjkxhhjdSimo DlimiPas encore d'évaluation
- Examen Partiel MEF 18-19 Session PrincipaleDocument2 pagesExamen Partiel MEF 18-19 Session Principaleسيف الدين يعقوبيPas encore d'évaluation
- TP G.indusDocument49 pagesTP G.indusSarah HATHOUTPas encore d'évaluation
- Mef M1 Voa Chapitre 5 - Elements Finis de PoutresDocument19 pagesMef M1 Voa Chapitre 5 - Elements Finis de Poutresmohamed el hadi arbidPas encore d'évaluation
- Hammer Notebook SoluceDocument8 pagesHammer Notebook SoluceMichael KabeyenePas encore d'évaluation
- Examen 2004Document2 pagesExamen 2004ouadazPas encore d'évaluation
- 11 Equations Et Inequations Dans IrDocument16 pages11 Equations Et Inequations Dans IrKakou Light MalanPas encore d'évaluation
- 1 Cours 1Document32 pages1 Cours 1Yahya LahmarPas encore d'évaluation
- ECG1 Maths Approfondies: Applications Linéaires en Dimension FinieDocument4 pagesECG1 Maths Approfondies: Applications Linéaires en Dimension FinieMoustakimPas encore d'évaluation
- Cours M135 Mr. Douiri 21-22Document162 pagesCours M135 Mr. Douiri 21-22RobaPas encore d'évaluation
- M Chapitre1 TDocument37 pagesM Chapitre1 Tel mlili YoussefPas encore d'évaluation
- Introduction A La Methode Des Elements FDocument106 pagesIntroduction A La Methode Des Elements FRedouane RedaPas encore d'évaluation
- ExamDocument2 pagesExamSaad Ettahiri0% (1)
- 2.Ch2 ACP 2022Document74 pages2.Ch2 ACP 2022ANAS BELLACHEPas encore d'évaluation
- Ch2 ACP MEA2 2020 21 1Document74 pagesCh2 ACP MEA2 2020 21 1OumaPas encore d'évaluation
- Poly TD Ma PDFDocument131 pagesPoly TD Ma PDFMohamed Ali Chebbi100% (1)
- ATS Programm23Document2 pagesATS Programm23Lolo57Pas encore d'évaluation
- CC Fem 2012Document2 pagesCC Fem 2012travail comptePas encore d'évaluation
- Enonce tp4Document3 pagesEnonce tp4Mirana LalatianaPas encore d'évaluation
- 2013-Banque PT-Physique B-PT-enonceDocument13 pages2013-Banque PT-Physique B-PT-enoncer_berthetPas encore d'évaluation
- 2bex 04 Ln-Expo Cr1Fr AmmariDocument4 pages2bex 04 Ln-Expo Cr1Fr AmmariKhaled NaasPas encore d'évaluation
- MSD 2005 JuinDocument3 pagesMSD 2005 JuinMohamed Youssef RedouanePas encore d'évaluation
- 04 MP CCP Physique 23Document7 pages04 MP CCP Physique 23Mohamed AminePas encore d'évaluation
- MEF CI2 ENSAM v1 - 221014 - 130404Document20 pagesMEF CI2 ENSAM v1 - 221014 - 130404Oumaima Bajou100% (1)
- TD 1 Ma 2018 VF2Document8 pagesTD 1 Ma 2018 VF2Mohamed BelbarakaPas encore d'évaluation
- Annales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésD'EverandAnnales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
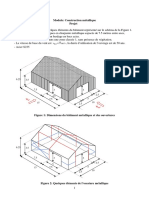
- PDF Pfe Charpente Metallique CompressDocument37 pagesPDF Pfe Charpente Metallique Compresssomaya ehPas encore d'évaluation
- 4Document1 page4somaya ehPas encore d'évaluation
- Mini ProjetDocument2 pagesMini Projetsomaya ehPas encore d'évaluation
- 3Document1 page3somaya ehPas encore d'évaluation
- PDF Le Flambement Et Le Deversement Des Pieces Metalliquespdf CompressDocument46 pagesPDF Le Flambement Et Le Deversement Des Pieces Metalliquespdf Compresssomaya ehPas encore d'évaluation
- Serie 4Document2 pagesSerie 4somaya ehPas encore d'évaluation
- Projet CMDocument4 pagesProjet CMsomaya ehPas encore d'évaluation
- Pfe BB 2Document54 pagesPfe BB 2somaya ehPas encore d'évaluation
- Cype Architecture 02Document42 pagesCype Architecture 02somaya ehPas encore d'évaluation
- Serie4 CM 2020 2021Document4 pagesSerie4 CM 2020 2021somaya ehPas encore d'évaluation
- TP Piste LpegcDocument32 pagesTP Piste Lpegcsomaya ehPas encore d'évaluation
- 3 BP PertesBPDocument47 pages3 BP PertesBPsomaya ehPas encore d'évaluation
- Serie3 CM 2020 2021Document3 pagesSerie3 CM 2020 2021somaya ehPas encore d'évaluation
- PFE Fartas Bendrimia CorectDocument118 pagesPFE Fartas Bendrimia Corectsomaya ehPas encore d'évaluation
- Serie2 CM 2020 2021Document2 pagesSerie2 CM 2020 2021somaya ehPas encore d'évaluation
- CM Cours4 2020 2021Document72 pagesCM Cours4 2020 2021somaya ehPas encore d'évaluation
- Corrige Serie2 CM 2020 2021Document5 pagesCorrige Serie2 CM 2020 2021somaya ehPas encore d'évaluation
- Pfe ModifieDocument156 pagesPfe Modifiesomaya ehPas encore d'évaluation
- Corrige Serie4 CM 2020 2021Document9 pagesCorrige Serie4 CM 2020 2021somaya ehPas encore d'évaluation
- CM Cours3 2020 2021Document75 pagesCM Cours3 2020 2021somaya ehPas encore d'évaluation
- CM Cours5 2020 2021Document89 pagesCM Cours5 2020 2021somaya ehPas encore d'évaluation
- Corrige Serie3 CM 2020 2021Document7 pagesCorrige Serie3 CM 2020 2021somaya ehPas encore d'évaluation
- Serie1 Sols 2020 2021Document2 pagesSerie1 Sols 2020 2021somaya ehPas encore d'évaluation
- Rapport Pfe Larhzal YounesDocument123 pagesRapport Pfe Larhzal Younessomaya ehPas encore d'évaluation
- Norme Françai SE NF P 06-001Document2 pagesNorme Françai SE NF P 06-001somaya ehPas encore d'évaluation
- Cours3et4 AcoDocument61 pagesCours3et4 Acosomaya ehPas encore d'évaluation
- Cours - ENSA - Notion D'aquifèreDocument38 pagesCours - ENSA - Notion D'aquifèresomaya ehPas encore d'évaluation
- Serie2 Sols 2020 2021Document2 pagesSerie2 Sols 2020 2021somaya ehPas encore d'évaluation
- Serie3 Sols 2020 2021Document2 pagesSerie3 Sols 2020 2021somaya ehPas encore d'évaluation
- HydrochimieDocument16 pagesHydrochimiesomaya ehPas encore d'évaluation
- Chapitre 3 - Cinamatique Des FluidesDocument12 pagesChapitre 3 - Cinamatique Des Fluidescedric EloundouPas encore d'évaluation
- RDM Chap 1Document23 pagesRDM Chap 1lahcen essPas encore d'évaluation
- Sujet 2 - 2022Document7 pagesSujet 2 - 2022lechien45.luPas encore d'évaluation
- CNC MP 2004 Maths 2 CorrigeDocument6 pagesCNC MP 2004 Maths 2 CorrigeEyoubPas encore d'évaluation
- Mepsta/Ietfp-Kara Composition Régionale Du 2 Semestre Durée: 4h Coef: An. Scol. 2022 - 202 Epreuve: Mathématiques Classe: F Exercice 1 (Document2 pagesMepsta/Ietfp-Kara Composition Régionale Du 2 Semestre Durée: 4h Coef: An. Scol. 2022 - 202 Epreuve: Mathématiques Classe: F Exercice 1 (Amen ZOGANPas encore d'évaluation
- Chapitre 5 ASSOCIATION DES COMPOSANTS PASSIFDocument17 pagesChapitre 5 ASSOCIATION DES COMPOSANTS PASSIFTorchaniPas encore d'évaluation
- Exercice IntegraleDocument10 pagesExercice IntegraleGuissePas encore d'évaluation
- Note de Calcul Reservoir Circulaire 1Document21 pagesNote de Calcul Reservoir Circulaire 1Manal TahriPas encore d'évaluation
- Fna 0022Document121 pagesFna 0022Renè CamusPas encore d'évaluation
- TP1 AutomatiqueDocument29 pagesTP1 AutomatiqueMaryPas encore d'évaluation
- Fiche-La Loi Des NoeudsDocument4 pagesFiche-La Loi Des NoeudsZahiri MohanadPas encore d'évaluation
- Cours Technologie Régulateurs M1Document28 pagesCours Technologie Régulateurs M1Joseph Amond100% (1)
- NFC 17-102Document45 pagesNFC 17-102bassem2017100% (1)
- Série 48 Étude de FonctionsDocument2 pagesSérie 48 Étude de FonctionsOmar GueyePas encore d'évaluation
- Bac A Math2016Document1 pageBac A Math2016Yusei485Pas encore d'évaluation
- Notice de Montage Distributeurs Progressifs Des Séries SSV, SSV-E, SSVM, SSVD, SSVD-E, SSVL, SSVDLDocument78 pagesNotice de Montage Distributeurs Progressifs Des Séries SSV, SSV-E, SSVM, SSVD, SSVD-E, SSVL, SSVDLOmkar TerkhedkarPas encore d'évaluation
- 3) Hydraulique Des SolsDocument16 pages3) Hydraulique Des SolsSoufiane BennadiPas encore d'évaluation
- Corps NoirDocument5 pagesCorps NoirAchrafPas encore d'évaluation
- Cours - CM - 2 - Chapitre - 2 - Bases de Dimensionnement Des Structures en Acier - 11 - 12Document127 pagesCours - CM - 2 - Chapitre - 2 - Bases de Dimensionnement Des Structures en Acier - 11 - 12molk kallel100% (1)
- Li & Lumb (1987) - Probabilistic Design of SlopesDocument19 pagesLi & Lumb (1987) - Probabilistic Design of Slopescarl wongPas encore d'évaluation
- TP15 - Mesure de PuissancesDocument5 pagesTP15 - Mesure de Puissancespapinou sarrPas encore d'évaluation
- Plan de Cours-Mat 1600Document4 pagesPlan de Cours-Mat 1600moreno.alexandre2003Pas encore d'évaluation
- TD - 5 - Tassement Et Consolidation Des SolsDocument5 pagesTD - 5 - Tassement Et Consolidation Des SolsJulianPas encore d'évaluation
- Chapitre 3Document11 pagesChapitre 3fihakhir aminePas encore d'évaluation
- Correction Examen Fondamental1Document5 pagesCorrection Examen Fondamental1Hassani HAMZAPas encore d'évaluation
- La Reaction Negative Ou Contre-Reaction (CHRETIEN-RP135 1959 4p)Document4 pagesLa Reaction Negative Ou Contre-Reaction (CHRETIEN-RP135 1959 4p)Christian FassierPas encore d'évaluation
- Cour 1Document12 pagesCour 1Mostefa Medouki100% (1)
- Support Superviseur DTM - 2Document4 pagesSupport Superviseur DTM - 2Mahrouz MadoPas encore d'évaluation
- Support Du Cours D'algebre (Version Etudiants)Document49 pagesSupport Du Cours D'algebre (Version Etudiants)KouassiPas encore d'évaluation
- ProdinfDocument25 pagesProdinfMaria Jose de las mercedes Costa AzulPas encore d'évaluation