Vous aimerez peut-être aussi
- Dynamique: Les Grands Articles d'UniversalisD'EverandDynamique: Les Grands Articles d'UniversalisPas encore d'évaluation
- Exercices Corriges Mecanique Du Point PDFDocument124 pagesExercices Corriges Mecanique Du Point PDFPythagore De Samos100% (2)
- INSA Toulouse 1A Mecanique Du Point Fascicule de TDDocument22 pagesINSA Toulouse 1A Mecanique Du Point Fascicule de TDpurplera1n100% (4)
- Mecanique PointDocument11 pagesMecanique Pointabdelhi7475% (4)
- Benson Physique Mecanique - Chapitre - 7Document6 pagesBenson Physique Mecanique - Chapitre - 7emiliealachance40% (5)
- Fascicule de Physique Ts 2018Document75 pagesFascicule de Physique Ts 2018Yahya Aidara100% (1)
- Chapitre 3 CinématiqueDocument41 pagesChapitre 3 CinématiqueNowe AhmadePas encore d'évaluation
- NombresComplexes 1Document51 pagesNombresComplexes 1Oussama DbibihPas encore d'évaluation
- Temps Et Cinematique Fiche de CoursDocument7 pagesTemps Et Cinematique Fiche de Coursd13jmPas encore d'évaluation
- Chapitre 1 - MécaniqueDocument14 pagesChapitre 1 - MécaniqueSakhir GayePas encore d'évaluation
- PUB Module 1 PCT TLe D SAN°1 (Guillaume TOGBODE, 2023)Document29 pagesPUB Module 1 PCT TLe D SAN°1 (Guillaume TOGBODE, 2023)abelatodjinou23Pas encore d'évaluation
- MMC Chapitre 1 EstemDocument23 pagesMMC Chapitre 1 Estemmehdi HEDDAJPas encore d'évaluation
- Le MouvementDocument7 pagesLe MouvementAbdel muslimPas encore d'évaluation
- Cinematique Du PointDocument19 pagesCinematique Du PointLucien TenorPas encore d'évaluation
- Cours Mecanique Du Point: Année Universitaire 23-24Document38 pagesCours Mecanique Du Point: Année Universitaire 23-24alexkys08Pas encore d'évaluation
- 05 Cours Lois Mecanique Outils MelissoDocument10 pages05 Cours Lois Mecanique Outils MelissoboustakatbPas encore d'évaluation
- MichelsonDocument7 pagesMichelsonjoykhalidrahmanPas encore d'évaluation
- MP PHYSIQUE MINES 2 2015.enonceDocument8 pagesMP PHYSIQUE MINES 2 2015.enonceOumaimaPas encore d'évaluation
- Serie MichelsonDocument8 pagesSerie MichelsonMD HM BCPas encore d'évaluation
- Transformation Coordonnees PDFDocument46 pagesTransformation Coordonnees PDFBassem BhiriPas encore d'évaluation
- Poly TD Ma PDFDocument131 pagesPoly TD Ma PDFMohamed Ali Chebbi100% (1)
- Physique1 Chapitre 2Document18 pagesPhysique1 Chapitre 2potatoPas encore d'évaluation
- Analyse Numerique Version 2022 2023Document36 pagesAnalyse Numerique Version 2022 2023KouamePas encore d'évaluation
- Zy 11Document40 pagesZy 11euqehtbPas encore d'évaluation
- Chap 2 MécaniDocument20 pagesChap 2 MécaniMame Diarra NiangPas encore d'évaluation
- TD Ondes Meca-Acous 20PCDocument39 pagesTD Ondes Meca-Acous 20PCmarcel478435Pas encore d'évaluation
- 9782402593908Document55 pages9782402593908reflectiondarkPas encore d'évaluation
- Cours de Physique Tle DDocument111 pagesCours de Physique Tle Dfloriane lagarde100% (1)
- Adobe Scan 27 Juin 2022Document8 pagesAdobe Scan 27 Juin 2022amal nejariPas encore d'évaluation
- Manuel de Cours PHY106 - Chap 1 CinémaDocument15 pagesManuel de Cours PHY106 - Chap 1 CinémaAdote Akue100% (1)
- MécaniqueDocument5 pagesMécaniqueChadi AbdelazizPas encore d'évaluation
- Physique Mecanique Du Solide CoursphysiqDocument8 pagesPhysique Mecanique Du Solide Coursphysiqridwane biyaoPas encore d'évaluation
- 1spé-Rappel 2nd-Etude Du MouvementDocument5 pages1spé-Rappel 2nd-Etude Du Mouvementjulialacade3Pas encore d'évaluation
- Cours Equations de MouvementDocument10 pagesCours Equations de Mouvementjulien skorkaPas encore d'évaluation
- Chap 1 OpmDocument57 pagesChap 1 OpmNathan ArsenaultPas encore d'évaluation
- Rattrapage 2019Document2 pagesRattrapage 2019Ima ToubalPas encore d'évaluation
- D1 2 Physique Notions Base PDFDocument42 pagesD1 2 Physique Notions Base PDFBoudjema SoudedPas encore d'évaluation
- Stat ProcDocument45 pagesStat ProcanasbonapartePas encore d'évaluation
- TD Cinematique Mpsi 1Document4 pagesTD Cinematique Mpsi 1aminealskjzPas encore d'évaluation
- Epreuves Ems 6Document5 pagesEpreuves Ems 6ndiayePas encore d'évaluation
- Tp1 Modelisation Analogique Et Simulation Des Systemes Asservis 1er 2ème Et 3èmDocument10 pagesTp1 Modelisation Analogique Et Simulation Des Systemes Asservis 1er 2ème Et 3èmfoulani630Pas encore d'évaluation
- CHAPITRE 1 La Physique en TSDocument54 pagesCHAPITRE 1 La Physique en TSmalickcoumibaly68Pas encore d'évaluation
- Cinematique Fiche CoursDocument4 pagesCinematique Fiche CoursShanthini JekumarPas encore d'évaluation
- SP20-TE-03-19 - Chapter 1Document2 pagesSP20-TE-03-19 - Chapter 1gilbert arraisPas encore d'évaluation
- 2258Document4 pages2258Omauma ElPas encore d'évaluation
- Cours TVEDocument160 pagesCours TVEKouakou Affran Rania marylisePas encore d'évaluation
- TD PHY106 2022.02.05 Cinépatique-EnergétiqueDocument3 pagesTD PHY106 2022.02.05 Cinépatique-Energétiquesamuellamboni918Pas encore d'évaluation
- Problème MichelsonDocument12 pagesProblème MichelsonWalid El AjiPas encore d'évaluation
- 10.théorèmes FondamentauxDocument26 pages10.théorèmes FondamentauxRuphin KabaselePas encore d'évaluation
- TDM1 CinematiqueDocument2 pagesTDM1 CinematiqueAyoub AmriPas encore d'évaluation
- PrazDocument20 pagesPrazrahliabdelkader1Pas encore d'évaluation
- Notes de Cours MMC PDFDocument242 pagesNotes de Cours MMC PDFMeryem BerrPas encore d'évaluation
- M1 - CIN Ematique Du Point: I Rep Erage D'un Point Et Syst' Emes Et Coordonn EesDocument4 pagesM1 - CIN Ematique Du Point: I Rep Erage D'un Point Et Syst' Emes Et Coordonn EesSalim ErrabiiPas encore d'évaluation
- 4 OscillateurDocument18 pages4 Oscillateurmamihax729Pas encore d'évaluation
- Partie 7Document6 pagesPartie 7Naoual39Pas encore d'évaluation
- Pôles D'Un Système Bouclés - Lieu D'Evans: GénéralitésDocument6 pagesPôles D'Un Système Bouclés - Lieu D'Evans: GénéralitésYanick leufaPas encore d'évaluation
- Cours - Cinematique Et Dynamique NewtonienneDocument15 pagesCours - Cinematique Et Dynamique Newtoniennenajib.elbakraoui22Pas encore d'évaluation
- TPPPPPPPDocument7 pagesTPPPPPPPHimer IlyesPas encore d'évaluation
- ANOVA Étape Par Étape (Tres Interessant)Document11 pagesANOVA Étape Par Étape (Tres Interessant)Fouad AzzaPas encore d'évaluation
- TD 1Document8 pagesTD 1Djm AlgPas encore d'évaluation
- Cours 1Document22 pagesCours 1Soufiane LamrabtiPas encore d'évaluation
- Données, Personnes ou Choses? / Fascicule de l'élève: Une clé pour s'orienter, Le code DPCD'EverandDonnées, Personnes ou Choses? / Fascicule de l'élève: Une clé pour s'orienter, Le code DPCPas encore d'évaluation
- Mouvement Hélicoïdal + SolutionDocument2 pagesMouvement Hélicoïdal + SolutionMohamed Selmani75% (4)
- Fiche Pédag Phy 3Document2 pagesFiche Pédag Phy 3Anas ElhamriPas encore d'évaluation
- Colle - 1 - CorrectionDocument2 pagesColle - 1 - CorrectionMohamed ElharouchPas encore d'évaluation
- GeomDiff2015 PDFDocument159 pagesGeomDiff2015 PDFjoseph gesterlinPas encore d'évaluation
- M1 Cinematique Du PointDocument12 pagesM1 Cinematique Du PointAmira DhorbaniPas encore d'évaluation
- Cours RDM Chapitre IIDocument9 pagesCours RDM Chapitre IIArsene KouamePas encore d'évaluation
- ZZZ SuppExos ME1 Cinematique Du Point Short2009Document8 pagesZZZ SuppExos ME1 Cinematique Du Point Short2009Oumarou KontaPas encore d'évaluation
- Chap 8 Cinématique ComplétéDocument6 pagesChap 8 Cinématique ComplétéSofiane KadPas encore d'évaluation
- Série 3 Energie Cinétique Approfondissements AT 23Document5 pagesSérie 3 Energie Cinétique Approfondissements AT 23fatouthioune664Pas encore d'évaluation
- La Théorie de La Relativité D'einstein À La Société Française de PhilosophieDocument22 pagesLa Théorie de La Relativité D'einstein À La Société Française de Philosophiemathesisuniversalis100% (4)
- Transp Chap5Document33 pagesTransp Chap5api-3703339Pas encore d'évaluation
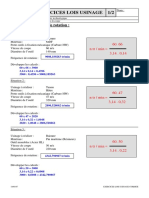
- Exercices Lois Usinage CorrigeDocument2 pagesExercices Lois Usinage Corrigehamid waalou100% (2)
- Dynamique Lagrangienne Et Hamiltonienne Cours L3 PDFDocument211 pagesDynamique Lagrangienne Et Hamiltonienne Cours L3 PDFWarda JoryPas encore d'évaluation
- Tp-Ov 2021Document19 pagesTp-Ov 2021Mohamed Amine BelkemitiPas encore d'évaluation
- 15 Mecanique Changements ReferentielDocument4 pages15 Mecanique Changements ReferentielMahboub SabirPas encore d'évaluation
- File 5 Mouvement Des Satellites Et Des Planetes Resume de Cours 2Document3 pagesFile 5 Mouvement Des Satellites Et Des Planetes Resume de Cours 2mondherdhaouadi5Pas encore d'évaluation
- 4 - Dynamique Des Systèmes MécaniquesDocument5 pages4 - Dynamique Des Systèmes MécaniquesChaima LajiliPas encore d'évaluation
- Physique Agrégation Externe Problème 2017 (Corrigé)Document30 pagesPhysique Agrégation Externe Problème 2017 (Corrigé)Larbi Ben TamaPas encore d'évaluation
- pb6 2 PDFDocument4 pagespb6 2 PDFAnis SouissiPas encore d'évaluation
- Serie 1 Cinematique TS1 2017 - 2018Document4 pagesSerie 1 Cinematique TS1 2017 - 2018PFE83% (6)
- TP Mecanique Sur Coussin DairDocument2 pagesTP Mecanique Sur Coussin DairCheujeu chaldouPas encore d'évaluation
- Chapitre10 CalibrationDocument26 pagesChapitre10 Calibrationabdessamad elmotarajjyPas encore d'évaluation
- S3M4 Presentation1 Cinématique RazoukiDocument7 pagesS3M4 Presentation1 Cinématique RazoukiAhmed ArbaouiPas encore d'évaluation