Vous aimerez peut-être aussi
- 1713035168635_TD - Révision Cinématique Des SolidesDocument3 pages1713035168635_TD - Révision Cinématique Des SolidesSohayla ElkarsPas encore d'évaluation
- Chap. 8-RotationDocument6 pagesChap. 8-RotationBénédicte & Christophe MULLERPas encore d'évaluation
- Universite Sultan Moulay SlimaneDocument16 pagesUniversite Sultan Moulay SlimaneNadia ElbouaazzaouiPas encore d'évaluation
- Turbomachines Approfondies Chapitre 1Document15 pagesTurbomachines Approfondies Chapitre 1BOUDOUNIT YounesPas encore d'évaluation
- Rotation D Un Solide Indeformable Autour D Un Axe Fixe Cours 1 4Document5 pagesRotation D Un Solide Indeformable Autour D Un Axe Fixe Cours 1 4Lion LionPas encore d'évaluation
- Fiche 2Document2 pagesFiche 2glokpaijeanjaures3Pas encore d'évaluation
- Série 1 - Mouvement de Rotation D'un Solide Autour D'un Axe FixeDocument4 pagesSérie 1 - Mouvement de Rotation D'un Solide Autour D'un Axe FixeNouhaila ChairPas encore d'évaluation
- Cours 1 - 1bac Mouvement de Rotation D'un Corps Solide Autour D'un Axe FixeDocument5 pagesCours 1 - 1bac Mouvement de Rotation D'un Corps Solide Autour D'un Axe Fixefay mourPas encore d'évaluation
- Exercice 1Document6 pagesExercice 1Houssam FerrahPas encore d'évaluation
- Cinétique Des Solides 22 1Document13 pagesCinétique Des Solides 22 1Chacha ZapPas encore d'évaluation
- Rotation D Un Solide Indeformable Autour D Un Axe Fixe Cours 1Document5 pagesRotation D Un Solide Indeformable Autour D Un Axe Fixe Cours 1GhostPas encore d'évaluation
- Révisions Et CinétiqueDocument47 pagesRévisions Et CinétiqueAdamPas encore d'évaluation
- Chapitre 11 Les Lois de NewtonDocument12 pagesChapitre 11 Les Lois de Newtonالغزيزال الحسن EL GHZIZAL Hassane100% (1)
- TD N°3 Cinématique Du Contact PonctuelDocument4 pagesTD N°3 Cinématique Du Contact PonctuelAmine RbzPas encore d'évaluation
- Chapitre IIDocument50 pagesChapitre IIqueen latiPas encore d'évaluation
- Etude Des Mouvements Circulaires N1Document21 pagesEtude Des Mouvements Circulaires N1dahelmohamedabderrahmanticPas encore d'évaluation
- CH05 Mécanisme de Transmission Du MouvementDocument8 pagesCH05 Mécanisme de Transmission Du Mouvementmouf zerargaPas encore d'évaluation
- TD2 Mouvement RelatifDocument3 pagesTD2 Mouvement Relatifkhledfadi8Pas encore d'évaluation
- Cours Mouvement de Rotation D PDFDocument7 pagesCours Mouvement de Rotation D PDFmohamed laghrib100% (4)
- Le Mouvement Exercices Non Corriges 1Document3 pagesLe Mouvement Exercices Non Corriges 1marouanePas encore d'évaluation
- TD Meca Point PC-MI 2023-2024Document5 pagesTD Meca Point PC-MI 2023-2024Adama Abdul Kader KAMBIREPas encore d'évaluation
- Chapitre 1 - TORSEURS Et Cinématique Du SolideDocument40 pagesChapitre 1 - TORSEURS Et Cinématique Du SolideMarc Dylan GRISPas encore d'évaluation
- Le Mouvement LA SUITEDocument2 pagesLe Mouvement LA SUITESérie AsiatiquePas encore d'évaluation
- Chapitre 2Document19 pagesChapitre 2Ber MouPas encore d'évaluation
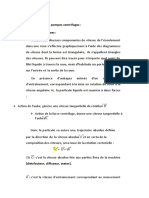
- II. 6. Théorie Des Pompes Centrifuges: 6. 1. Triangle Des VitessesDocument5 pagesII. 6. Théorie Des Pompes Centrifuges: 6. 1. Triangle Des VitessesYahia Herzallah100% (1)
- POSTER Master 2 2017 PDFDocument1 pagePOSTER Master 2 2017 PDFfitasmounirPas encore d'évaluation
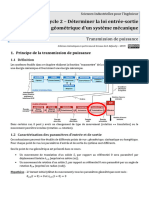
- Transmission de PuissanceDocument111 pagesTransmission de PuissanceSaley NouroudinePas encore d'évaluation
- Cours TD Matrice InertieDocument24 pagesCours TD Matrice InertieSoundous TayssirPas encore d'évaluation
- CR TPDocument4 pagesCR TPanass anasPas encore d'évaluation
- Chapitre 3Document19 pagesChapitre 3Chaoune MedPas encore d'évaluation
- Cycle2_Engrenages_v4Document8 pagesCycle2_Engrenages_v4kupoalorchristian1Pas encore d'évaluation
- PapierDocument20 pagesPapierihsaneaitlhoussainPas encore d'évaluation
- Physique-Chimie 2: Géophysique de La Planète TerreDocument9 pagesPhysique-Chimie 2: Géophysique de La Planète TerreMohamed Amine ChalhyPas encore d'évaluation
- دروس الفيزياء والكيمياء أولى باك علوم رياضية خيار فرنسيةDocument301 pagesدروس الفيزياء والكيمياء أولى باك علوم رياضية خيار فرنسيةAli OuchnPas encore d'évaluation
- Test Méca II - DTCDocument1 pageTest Méca II - DTCSovann LongPas encore d'évaluation
- Solution Ex01 TD2Document2 pagesSolution Ex01 TD2Ромаисса СамедPas encore d'évaluation
- Lois de Newton Resume de Cours 2Document3 pagesLois de Newton Resume de Cours 2Trkhbi9 AnoflPas encore d'évaluation
- CHP 1 Lois de NewtonDocument11 pagesCHP 1 Lois de NewtonSaad Filali Oujdi100% (1)
- TD 05-02Document3 pagesTD 05-02RocPas encore d'évaluation
- Chap 4Document30 pagesChap 4OMAR ENNAJIPas encore d'évaluation
- Chapitre 5 EngrenagesHelicoidauxDocument12 pagesChapitre 5 EngrenagesHelicoidauxKaram QaoubPas encore d'évaluation
- LoisCons 23Document38 pagesLoisCons 23spartacus.avoukarouillePas encore d'évaluation
- TD2 Cinématique Du Solide (2022)Document4 pagesTD2 Cinématique Du Solide (2022)Mohamed Soibaha ChaambanePas encore d'évaluation
- Axe Instantané de Rotation - WikipédiaDocument19 pagesAxe Instantané de Rotation - WikipédiankolostacyPas encore d'évaluation
- Axe Instantané de Rotation - WikipédiaDocument19 pagesAxe Instantané de Rotation - WikipédiaLoïc yvan steve FezePas encore d'évaluation
- Rotation D Un Solide Indeformable Autour D Un Axe Fixe CoursDocument10 pagesRotation D Un Solide Indeformable Autour D Un Axe Fixe Coursphytanja100% (1)
- Roue de MaxwellDocument3 pagesRoue de MaxwellYassine Achraoiou67% (3)
- Chapitre Vii PDFDocument11 pagesChapitre Vii PDFHatim ElfoudaliPas encore d'évaluation
- TD N°2 Cinématique Du Solide Composition Des Vitesses Torseur CinématiqueDocument4 pagesTD N°2 Cinématique Du Solide Composition Des Vitesses Torseur CinématiqueMadiama NdiayePas encore d'évaluation
- 1 Mouement de Rotation PDFDocument13 pages1 Mouement de Rotation PDFHamza KachkachiPas encore d'évaluation
- Meca 4 GrosDocument10 pagesMeca 4 GrosHamzaPas encore d'évaluation
- Devoir À Rendre (Mécanique Rationnelle) ESGE-2023Document2 pagesDevoir À Rendre (Mécanique Rationnelle) ESGE-2023Toure Mame Coumba lamPas encore d'évaluation
- TD 8 Cinématique 1ere PartieDocument3 pagesTD 8 Cinématique 1ere PartiedestextesecritsPas encore d'évaluation
- Partie II - Rappels Solides en Rotation Autour D'un Axe FixeDocument7 pagesPartie II - Rappels Solides en Rotation Autour D'un Axe FixeAbdoul Kader OUATTARAPas encore d'évaluation
- Cours Systeme de Transf MouvDocument6 pagesCours Systeme de Transf MouvlemsouguerPas encore d'évaluation
- Geometrie Masse Tenseur InertieDocument13 pagesGeometrie Masse Tenseur Inertiefz bfsPas encore d'évaluation
- Exos Cinematique SolideDocument3 pagesExos Cinematique SolideDABAKH LDEEBOYPas encore d'évaluation
- 4.Controle Des VibrationsDocument32 pages4.Controle Des Vibrationsrenato96Pas encore d'évaluation
- Cours FlexionDocument10 pagesCours FlexionChacha ZapPas encore d'évaluation
- Code MatlabDocument5 pagesCode MatlabChacha ZapPas encore d'évaluation
- Cinétique Des Solides 22 1Document13 pagesCinétique Des Solides 22 1Chacha ZapPas encore d'évaluation
- Applications Linéaires 2Document5 pagesApplications Linéaires 2Chacha ZapPas encore d'évaluation
- Applications Linéaires 2Document5 pagesApplications Linéaires 2Chacha ZapPas encore d'évaluation
- Roues de FrictionDocument8 pagesRoues de FrictionTom JerryPas encore d'évaluation
- Récipients Sous PressionDocument13 pagesRécipients Sous PressionRaouf BelamriPas encore d'évaluation
- Support de Cours Part I - Climatisation Solaire MGCME FSB MASTERE 2017Document38 pagesSupport de Cours Part I - Climatisation Solaire MGCME FSB MASTERE 2017Amine AlouiPas encore d'évaluation
- Fab - MecaDocument2 pagesFab - MecaELMustaphaELMoukhtariPas encore d'évaluation
- Étude Et Automatisation D'une Étiqueteuse Sacmi Au Sein de L'unité Conditionnement D'huile À Cevital de Bejaia PDFDocument88 pagesÉtude Et Automatisation D'une Étiqueteuse Sacmi Au Sein de L'unité Conditionnement D'huile À Cevital de Bejaia PDFIbtihel Mechleoui67% (9)
- Elements de Cours-FraisageDocument8 pagesElements de Cours-FraisageKhoubaib Khelifi50% (2)
- IbrahimDocument13 pagesIbrahimIbrahim SkakriPas encore d'évaluation
- 2 Actions MécaniquesDocument5 pages2 Actions MécaniqueszinzingenieurPas encore d'évaluation
- Chapitre 3 Normes Europeennes de DimensiDocument26 pagesChapitre 3 Normes Europeennes de DimensibasssemPas encore d'évaluation
- Cours Rhéologie 1 - Définitions Et GénéralitésDocument21 pagesCours Rhéologie 1 - Définitions Et GénéralitésMohamed Kamal67% (3)
- Cour Techno La Distribution ForAutoDocument9 pagesCour Techno La Distribution ForAutoNour Enzo100% (1)
- Am9 21000-24999Document30 pagesAm9 21000-24999anon-578063100% (1)
- RMChap3 (Traction)Document35 pagesRMChap3 (Traction)Bouallegue MounirPas encore d'évaluation
- Exo PlasticiteDocument62 pagesExo PlasticiteDjelloul ReziniPas encore d'évaluation
- Terex AC - 80-2 - Training - Manual - 2.2 PDFDocument806 pagesTerex AC - 80-2 - Training - Manual - 2.2 PDFlexxa321100% (12)
- 448 S - Hydraulique D'équipement Des 631GDocument54 pages448 S - Hydraulique D'équipement Des 631Gait mimounePas encore d'évaluation
- RDM TP Ndeg01 Essai de Traction 1Document18 pagesRDM TP Ndeg01 Essai de Traction 1Amine EL FERHANIPas encore d'évaluation
- Scule SpecializateDocument22 pagesScule SpecializateRadu VasilePas encore d'évaluation
- Wacker Dpu 6055 Partes PDFDocument96 pagesWacker Dpu 6055 Partes PDFDawn HallPas encore d'évaluation
- RTA Audi A3 Diesel AutovoltDocument25 pagesRTA Audi A3 Diesel Autovoltjulia100% (1)
- Rappel TH Série 3Document6 pagesRappel TH Série 3Yacine RMPas encore d'évaluation
- Vue Eclatee Tronconneuse Stihl Ms 180 C BeDocument24 pagesVue Eclatee Tronconneuse Stihl Ms 180 C BeAlain GARNIERPas encore d'évaluation
- RMChap3 (Traction) ExSup PDFDocument5 pagesRMChap3 (Traction) ExSup PDFToufikJalalEddine100% (1)
- FormulesDocument1 pageFormuleshousamPas encore d'évaluation
- DS2015Document6 pagesDS2015Pauline ViotPas encore d'évaluation
- Notice Citroen c4 Notice D Utilisation, 94,1Document172 pagesNotice Citroen c4 Notice D Utilisation, 94,1Simo QzPas encore d'évaluation
- Tarif NoirotDocument36 pagesTarif Noirotnerman dzananovicPas encore d'évaluation
- Boite de Vitesses Robotisee Sensodrive de c3Document5 pagesBoite de Vitesses Robotisee Sensodrive de c3aymendabPas encore d'évaluation
- MANATEC Wheel Balancer - SISTEMA AUTOMOTRIZDocument4 pagesMANATEC Wheel Balancer - SISTEMA AUTOMOTRIZSistema AutomotrizPas encore d'évaluation
- Bioénergie et Sciences Occultes: Pour un corps sain et un esprit sain dans un lieu sainD'EverandBioénergie et Sciences Occultes: Pour un corps sain et un esprit sain dans un lieu sainÉvaluation : 4 sur 5 étoiles4/5 (2)
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsD'EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Le profilage au service du football: Démarche scientifique pour un recrutement et entraînements optimisésD'EverandLe profilage au service du football: Démarche scientifique pour un recrutement et entraînements optimisésPas encore d'évaluation
- Harmonisation Energétique des Personnes: Manuel de Curothérapie 2020D'EverandHarmonisation Energétique des Personnes: Manuel de Curothérapie 2020Évaluation : 4 sur 5 étoiles4/5 (8)
- La pensée dirigée: Traité sur le raisonnement et les logiquesD'EverandLa pensée dirigée: Traité sur le raisonnement et les logiquesÉvaluation : 5 sur 5 étoiles5/5 (2)
- Un régime quantiqueD'EverandUn régime quantiqueÉvaluation : 5 sur 5 étoiles5/5 (1)
- Théorie relative de la musique: Maîtriser le mouvement par la logique des intervallesD'EverandThéorie relative de la musique: Maîtriser le mouvement par la logique des intervallesÉvaluation : 4 sur 5 étoiles4/5 (1)
- Sur les fondements de la théorie des ensembles transfinisD'EverandSur les fondements de la théorie des ensembles transfinisPas encore d'évaluation
- Physique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresD'EverandPhysique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresÉvaluation : 5 sur 5 étoiles5/5 (2)
- le Phoenix de nos âmes: Les lois énergétiques de la lumière divineD'Everandle Phoenix de nos âmes: Les lois énergétiques de la lumière divinePas encore d'évaluation
- La Conscience Et L'Univers Existent Sans Commencement Ni FinD'EverandLa Conscience Et L'Univers Existent Sans Commencement Ni FinPas encore d'évaluation
- Voyager à Travers les Mondes Parallèles pour Atteindre vos RêvesD'EverandVoyager à Travers les Mondes Parallèles pour Atteindre vos RêvesÉvaluation : 4 sur 5 étoiles4/5 (11)
- Voyage au-delà du corps: L'exploration de nos Univers intérieursD'EverandVoyage au-delà du corps: L'exploration de nos Univers intérieursÉvaluation : 4.5 sur 5 étoiles4.5/5 (20)
- L'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.D'EverandL'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.Pas encore d'évaluation
- Saturne: Les Grands Articles d'UniversalisD'EverandSaturne: Les Grands Articles d'UniversalisPas encore d'évaluation
- Enchevêtrement quantique et inconscient collectif. Physique et métaphysique de l'univers. Nouvelles interprétations.D'EverandEnchevêtrement quantique et inconscient collectif. Physique et métaphysique de l'univers. Nouvelles interprétations.Pas encore d'évaluation