Vous aimerez peut-être aussi
- Compte Rendu Sys Asservis PDFDocument21 pagesCompte Rendu Sys Asservis PDFKhalîl Ðkhílí100% (1)
- Commande LQRDocument9 pagesCommande LQRIslem DZPas encore d'évaluation
- Chapitre5 Master SANDocument8 pagesChapitre5 Master SANOussama BaddaouiPas encore d'évaluation
- CHAPITRE IV - SLM - Commande Par Retour D'état Des Systèmes SISODocument9 pagesCHAPITRE IV - SLM - Commande Par Retour D'état Des Systèmes SISOAkira100% (1)
- Commande Optimale Linéaire Quadratique-Dec2020Document6 pagesCommande Optimale Linéaire Quadratique-Dec2020Çhøčø LãtãPas encore d'évaluation
- Systeme Singulierement PerturbeDocument8 pagesSysteme Singulierement Perturbedhia lkPas encore d'évaluation
- CHAPITRE II SLM Représentation DétatDocument15 pagesCHAPITRE II SLM Représentation DétatAziz AzizPas encore d'évaluation
- Cours D'automatique, Représentation D'état Partie VIDocument17 pagesCours D'automatique, Représentation D'état Partie VIAdams KaborePas encore d'évaluation
- Generalite SystemenlineaireDocument11 pagesGeneralite SystemenlineaireNouraPas encore d'évaluation
- Chapitre 01Document10 pagesChapitre 01algPas encore d'évaluation
- Résumé Chapitre2 Systèmes Linéaires MultivariablesDocument9 pagesRésumé Chapitre2 Systèmes Linéaires Multivariablesikram mammarPas encore d'évaluation
- Chapitre 5-2023-2024Document5 pagesChapitre 5-2023-2024hammardjamel.0Pas encore d'évaluation
- TD1 - Représentation D'étatDocument4 pagesTD1 - Représentation D'étatssafouen4Pas encore d'évaluation
- Série de TD#2 - SLM - 2021 + SolutionDocument6 pagesSérie de TD#2 - SLM - 2021 + SolutionmessiPas encore d'évaluation
- AsservissementDocument8 pagesAsservissementCheick KouatéPas encore d'évaluation
- Cours Commande AvancéesChapitre 1Document10 pagesCours Commande AvancéesChapitre 1Azza LaabedPas encore d'évaluation
- Chapitre 3Document6 pagesChapitre 3Boù ChràPas encore d'évaluation
- UEF611 Chapitre 3 Analyse Dans Lespace Détat Des Systèmes 2020Document29 pagesUEF611 Chapitre 3 Analyse Dans Lespace Détat Des Systèmes 2020Arrow ArrowPas encore d'évaluation
- TD02 Exo3à6 Avec-SolutionDocument4 pagesTD02 Exo3à6 Avec-Solutionchaib draa hadjerPas encore d'évaluation
- Rapport de Mini ProjetDocument9 pagesRapport de Mini ProjetAymen BenguessoumPas encore d'évaluation
- Systèmes Échantillonnés (Discrets)Document9 pagesSystèmes Échantillonnés (Discrets)Hafa ApbPas encore d'évaluation
- Chapitre 3 Commandabilitéet Observabilitédes Systèmes LinéairesDocument5 pagesChapitre 3 Commandabilitéet Observabilitédes Systèmes LinéairesSalim BouaziziPas encore d'évaluation
- 2 Modèle FrequentielDocument19 pages2 Modèle FrequentielLaurenne YaoPas encore d'évaluation
- ACFrOgCFhys05Bx1Kji De3K7TXp KU1Ln4oknoiB-Uo2LRrHJgFWsVLoaYdLmLodqUaufgMyrFDyULzRxffhIAs7Fkqv8ypX3F1K9U 4gBmqAkx6ywxcpFI7nF X1LdxkhSB-84dk7iaUaywa1rDocument4 pagesACFrOgCFhys05Bx1Kji De3K7TXp KU1Ln4oknoiB-Uo2LRrHJgFWsVLoaYdLmLodqUaufgMyrFDyULzRxffhIAs7Fkqv8ypX3F1K9U 4gBmqAkx6ywxcpFI7nF X1LdxkhSB-84dk7iaUaywa1rBADR MTIRAOUIPas encore d'évaluation
- AsservissementDocument11 pagesAsservissementCheick KouatéPas encore d'évaluation
- Analyse Des Systèmes Dans L'espace D'état - Année Académique 2023-2024Document17 pagesAnalyse Des Systèmes Dans L'espace D'état - Année Académique 2023-2024hammardjamel.0Pas encore d'évaluation
- TP Salc 1Document17 pagesTP Salc 1motmaniPas encore d'évaluation
- TD AutomatiqueDocument2 pagesTD AutomatiqueAmadou Abdoulaye DIENGPas encore d'évaluation
- EDDAAF Yassin TD5 Correcteur RSTDocument10 pagesEDDAAF Yassin TD5 Correcteur RSTyassin EDDAAFPas encore d'évaluation
- Solutions Des Exercices de La Série de TD #1 CSLDocument7 pagesSolutions Des Exercices de La Série de TD #1 CSLfazfrito lacaviataPas encore d'évaluation
- Corrigé - Examen Final - SLM - 2021Document4 pagesCorrigé - Examen Final - SLM - 2021messiPas encore d'évaluation
- Cours Part I LPGEDocument10 pagesCours Part I LPGEABDERRAHMANE AOUSSAYPas encore d'évaluation
- Chapitre3 Systèmes AsservisDocument10 pagesChapitre3 Systèmes AsservisEmmanuel Kawalina KatalikoPas encore d'évaluation
- Chapitre 2 - SLMDocument17 pagesChapitre 2 - SLMmohamed kolliPas encore d'évaluation
- Exercices Chap 1Document1 pageExercices Chap 1Anna christina Kolandjian0% (1)
- Sol TD2Document2 pagesSol TD2Kha Oula DjebailiPas encore d'évaluation
- Theorie de Lyapunov Sur La Stabilite E2010Document102 pagesTheorie de Lyapunov Sur La Stabilite E2010Abdallah Belabbes100% (1)
- Synthèse de Régulateurs NumériquesDocument15 pagesSynthèse de Régulateurs NumériquesBADR MTIRAOUIPas encore d'évaluation
- TP Auto MEEA 04 05 PDFDocument88 pagesTP Auto MEEA 04 05 PDFYassine RabhiPas encore d'évaluation
- Commande AvancéeDocument43 pagesCommande AvancéeKha Oula DjebailiPas encore d'évaluation
- TS Cours Chapitre 5Document4 pagesTS Cours Chapitre 5Azze DdinePas encore d'évaluation
- Chapitre 3Document6 pagesChapitre 3kawtherPas encore d'évaluation
- Corrige ExamsDocument5 pagesCorrige ExamsHadil SellamiPas encore d'évaluation
- Chapitre 6Document7 pagesChapitre 6Mahrez DerdoumPas encore d'évaluation
- Automatique Des SystèmesDocument85 pagesAutomatique Des Systèmesأمير العرب67% (3)
- TD03 Commande Prédictive GPCDocument3 pagesTD03 Commande Prédictive GPCmaira benPas encore d'évaluation
- TD Traitement NumériqueDocument4 pagesTD Traitement NumériqueMouad OugazzouPas encore d'évaluation
- Examen 2013 PDFDocument4 pagesExamen 2013 PDFEl MagoPas encore d'évaluation
- Semaine 9Document5 pagesSemaine 9Kpabou KpabouPas encore d'évaluation
- CHP 2 MultiDocument18 pagesCHP 2 Multirami elloniPas encore d'évaluation
- Chap-2 Cours3Document6 pagesChap-2 Cours3Louis PouchepadassPas encore d'évaluation
- Correction de La Serie deTDN-2Document11 pagesCorrection de La Serie deTDN-2hangouta hangootaPas encore d'évaluation
- Examene Physique 03 VF 2022Document5 pagesExamene Physique 03 VF 2022Omar LANGEURPas encore d'évaluation
- Support TS - CH3 - L2etL3 ESATIC 2019 PDFDocument57 pagesSupport TS - CH3 - L2etL3 ESATIC 2019 PDFFourier Cédric DanPas encore d'évaluation
- TPMCC Auriol Idriss ElliottDocument13 pagesTPMCC Auriol Idriss Elliottoteme Mbella King DuclairPas encore d'évaluation
- Projet Automatique HASSISSENE MENEZDocument27 pagesProjet Automatique HASSISSENE MENEZsonia hassissenePas encore d'évaluation
- SuzzyDocument16 pagesSuzzyGOUAL SaraPas encore d'évaluation
- Chapitre-3 - Fonction de TransfertDocument7 pagesChapitre-3 - Fonction de TransfertAbdelmalikPas encore d'évaluation
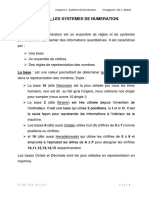
- Chapitre 2 - Systeme de NumérationDocument8 pagesChapitre 2 - Systeme de Numérationmeharzirafik0Pas encore d'évaluation
- EN ISO 14688-1 (2002) (F) CodifiedDocument6 pagesEN ISO 14688-1 (2002) (F) CodifiedchaimaaPas encore d'évaluation
- td2 Mes Inté 2023-2Document1 pagetd2 Mes Inté 2023-2Thinkpad LenovoPas encore d'évaluation
- Expression Ecrite StrategiesDocument15 pagesExpression Ecrite StrategiesPapa NguiranePas encore d'évaluation
- Les - Docx ESFDocument8 pagesLes - Docx ESFJoel KoffiPas encore d'évaluation
- Sujets PFE: Rue de Lac Ghar El Melh Les Berges Du Lac 1053 TunisDocument16 pagesSujets PFE: Rue de Lac Ghar El Melh Les Berges Du Lac 1053 TunisFARAH BEN AMORPas encore d'évaluation
- Bts SN 2023 E4 Metropole Sujet Documents Reponses Professionnel SnirDocument8 pagesBts SN 2023 E4 Metropole Sujet Documents Reponses Professionnel Snirz9qg8sjn62Pas encore d'évaluation
- O MEU PASTOR É O BOM JESUS - Partitura CompletaDocument2 pagesO MEU PASTOR É O BOM JESUS - Partitura CompletaJoão Gualberto Alves NetoPas encore d'évaluation
- Corrigé S1Document3 pagesCorrigé S1MohamedPas encore d'évaluation
- BD1 Intro PDFDocument20 pagesBD1 Intro PDFTA RikPas encore d'évaluation
- BusinessDocument4 pagesBusinessdonasarahtPas encore d'évaluation
- Lui FerezDocument1 pageLui FerezDulcio DunelsonPas encore d'évaluation
- Sapiro CVDocument30 pagesSapiro CVJeannePas encore d'évaluation
- BABU Jean-Philippe L'influence de La Tradition Grammaticale Gréco-Latine Sur La Grammaire Du Thaï (Communication Au Colloque de l'ATPF, Bangkok, 2007)Document17 pagesBABU Jean-Philippe L'influence de La Tradition Grammaticale Gréco-Latine Sur La Grammaire Du Thaï (Communication Au Colloque de l'ATPF, Bangkok, 2007)Jean-Philippe BABUPas encore d'évaluation
- Séquence 0Document34 pagesSéquence 0rihab Bouabid100% (1)
- InformatiqueDocument26 pagesInformatiqueimed imddPas encore d'évaluation
- Fractales Et InfiniDocument7 pagesFractales Et InfiniQuentin LesagePas encore d'évaluation
- Bilan Sur L'histoire LittéraireDocument11 pagesBilan Sur L'histoire LittéraireCherif ChokeirPas encore d'évaluation
- Cours Architecture Logiciel Pour EtudiantsDocument28 pagesCours Architecture Logiciel Pour EtudiantsDorra BouhamdiPas encore d'évaluation
- Cours DeterminantsDocument11 pagesCours DeterminantsClory KanyamunezaPas encore d'évaluation
- Anatomie Physiologie Appareil LocomoteurDocument76 pagesAnatomie Physiologie Appareil LocomoteurTarek Dido100% (1)
- 1 Eso - Le Présent Du Verbe ÊtreDocument4 pages1 Eso - Le Présent Du Verbe ÊtrevaleriePas encore d'évaluation
- TP5: Agrégation Et Association: Exercice 1Document3 pagesTP5: Agrégation Et Association: Exercice 1rihab benmarzoukPas encore d'évaluation
- Script CPFDocument2 pagesScript CPFYao Kouakou HilairePas encore d'évaluation
- Java Notions Fondamentales Open ClassroomDocument223 pagesJava Notions Fondamentales Open ClassroomAnas SoryPas encore d'évaluation
- Prise en Charge Des Vertiges en UrgenceDocument30 pagesPrise en Charge Des Vertiges en UrgenceAbdelmoumen DjazairiPas encore d'évaluation
- Kleczkloweski Cours 1Document100 pagesKleczkloweski Cours 1Cornion MastanabalPas encore d'évaluation
- FrenchDocument114 pagesFrenchappu KandathilPas encore d'évaluation
- Prières de LibérationDocument11 pagesPrières de Libérationjmlb0123Pas encore d'évaluation