Vous aimerez peut-être aussi
- Cours 11 s4MDF APPDocument30 pagesCours 11 s4MDF APPDenilson JosemirPas encore d'évaluation
- Phénoménologie de La Turbulence Développée - Ordres de Grandeurs Et Quantités DimensionnantesDocument9 pagesPhénoménologie de La Turbulence Développée - Ordres de Grandeurs Et Quantités DimensionnantesJulien Bernier OuelletPas encore d'évaluation
- Ecoulement de Fluides Newtoniens: Chapitre 4Document12 pagesEcoulement de Fluides Newtoniens: Chapitre 4jadePas encore d'évaluation
- CHAP I - Equations de Base Des Écoulements À Surface Libre MonodimensionnelsDocument10 pagesCHAP I - Equations de Base Des Écoulements À Surface Libre MonodimensionnelsMira GouffiPas encore d'évaluation
- Chapitre 2 CinAmatique Des Fluides STDocument6 pagesChapitre 2 CinAmatique Des Fluides STkarloban4Pas encore d'évaluation
- Dynamique Des Fluides 3.1. Equation de Navier. Equation de Navier-Stokes. Equation D'eulerDocument11 pagesDynamique Des Fluides 3.1. Equation de Navier. Equation de Navier-Stokes. Equation D'eulerahmed hmedPas encore d'évaluation
- CH3 - Cours MFDocument13 pagesCH3 - Cours MFznikr upPas encore d'évaluation
- Fluides Visqueux Et Nombre de Reynolds 3Document16 pagesFluides Visqueux Et Nombre de Reynolds 3Celine GrasPas encore d'évaluation
- Couche Limite LaminaireDocument4 pagesCouche Limite Laminairemohammed8nizarPas encore d'évaluation
- TdmecafluDocument11 pagesTdmecafluEvaPas encore d'évaluation
- IV. Écoulement Isotherme Dun Fluide Visqueux Dans Différents GéométriesDocument19 pagesIV. Écoulement Isotherme Dun Fluide Visqueux Dans Différents Géométriesben yahya ezzeddinePas encore d'évaluation
- Capitre 4 Mdf-ConvertiDocument9 pagesCapitre 4 Mdf-ConvertiLina alikh100% (1)
- Etude Theorique Aile Et Foils Avec Mecaflux Standard Et HelicielDocument37 pagesEtude Theorique Aile Et Foils Avec Mecaflux Standard Et HelicielOmaMansouPas encore d'évaluation
- MHDDocument6 pagesMHDAbdessemed FouziPas encore d'évaluation
- Chapitre N°02 Partie 3 Ecoulement StokesDocument9 pagesChapitre N°02 Partie 3 Ecoulement Stokesabdou jskPas encore d'évaluation
- Cours Chap 4 - 1 Et 2 SimplifiedDocument11 pagesCours Chap 4 - 1 Et 2 SimplifiedSAIDI BachirPas encore d'évaluation
- Fluides VisqueuxDocument16 pagesFluides Visqueuxoussama bensassiPas encore d'évaluation
- HydrodynamiqueDocument21 pagesHydrodynamiqueaminPas encore d'évaluation
- Travaux Dirigés 4 A en MFE II - 2021Document23 pagesTravaux Dirigés 4 A en MFE II - 2021Mael DarrylPas encore d'évaluation
- Cours Méca Fluide FormDocument7 pagesCours Méca Fluide FormCop85 COCPas encore d'évaluation
- HOutDynFluidM1 1Document90 pagesHOutDynFluidM1 1Mohammed Amine MoussaouiPas encore d'évaluation
- Hydraulique Générale (L3) GC (S1)Document13 pagesHydraulique Générale (L3) GC (S1)El ChaimaPas encore d'évaluation
- Chapitre 4 Dynamique Des Fluides Incompressibles Reels PDFDocument21 pagesChapitre 4 Dynamique Des Fluides Incompressibles Reels PDFFouad Dimane0% (1)
- Chapitre 3 MFTDocument45 pagesChapitre 3 MFTjoseph GontoPas encore d'évaluation
- Chapitre 4 MDF1Document12 pagesChapitre 4 MDF1Mohamed Amine BelkemitiPas encore d'évaluation
- RéseauxDocument10 pagesRéseauxissammoudjahedPas encore d'évaluation
- Description D'un Fluide 3Document7 pagesDescription D'un Fluide 3Celine GrasPas encore d'évaluation
- TAT Mécanique Des Fluides 1Document4 pagesTAT Mécanique Des Fluides 1drakox.fortnitePas encore d'évaluation
- Etude Theorique Aile Et Foils Avec Mecaflux Standard Et HelicielDocument37 pagesEtude Theorique Aile Et Foils Avec Mecaflux Standard Et HelicielenguerrandvaubyPas encore d'évaluation
- Chapitre 2 - Cinématique Des FluidesDocument16 pagesChapitre 2 - Cinématique Des FluidesBrahim MouhcinePas encore d'évaluation
- Chapitre 2 (Diapo) - Cinématique Des FluidesDocument27 pagesChapitre 2 (Diapo) - Cinématique Des FluidesJasmine Yasmine100% (1)
- Chapitre 03Document10 pagesChapitre 03kawterPas encore d'évaluation
- MF1 4oct 2022 s3Document24 pagesMF1 4oct 2022 s3Aziz ArfaaouiPas encore d'évaluation
- Master 1 Eau Et Environnment Cours Ecoulement FluvialDocument29 pagesMaster 1 Eau Et Environnment Cours Ecoulement FluvialDoha SaidiPas encore d'évaluation
- Projet de Mecanique Des FluidesDocument45 pagesProjet de Mecanique Des FluidesBrahim Mouhcine0% (1)
- Chapitre 4. Dynamique Des Fluides Incompressibles ReelsDocument12 pagesChapitre 4. Dynamique Des Fluides Incompressibles ReelsKhaled ChaibPas encore d'évaluation
- TD 4 - MF - EnsasDocument2 pagesTD 4 - MF - Ensasznikr upPas encore d'évaluation
- Ecoulement Incompressible Autour Obstacle2Document7 pagesEcoulement Incompressible Autour Obstacle2Celine GrasPas encore d'évaluation
- Chapitre 3Document12 pagesChapitre 3Anas HannaniPas encore d'évaluation
- CHAPITRE4MFDocument35 pagesCHAPITRE4MFrachida lakaazPas encore d'évaluation
- Chapitre IV Eclmnt Non UniformeDocument8 pagesChapitre IV Eclmnt Non UniformeAli EmirPas encore d'évaluation
- 4 Cours de Mécaniques Des FluidesDocument50 pages4 Cours de Mécaniques Des FluidesybenguennyPas encore d'évaluation
- Cours MDF Cinématique Des FluidesDocument10 pagesCours MDF Cinématique Des FluidesAbed Taha YacinePas encore d'évaluation
- BTS CPI 2 CH 6 Fluides RéelsDocument3 pagesBTS CPI 2 CH 6 Fluides RéelsLucas Filipuzzi100% (2)
- Hydraulique Chapitre VDocument22 pagesHydraulique Chapitre VMolo MoloPas encore d'évaluation
- Dynamique Des Fluides 2 Bac Science DingenieurDocument9 pagesDynamique Des Fluides 2 Bac Science DingenieuronePas encore d'évaluation
- Chapitre V L'écoulement Rapidement Varié Ressaut HydrauliqueDocument12 pagesChapitre V L'écoulement Rapidement Varié Ressaut Hydrauliquebrice mouadje100% (1)
- Chap 3 Ecoult À Surf Libre Et Courbe de Remous 2016Document13 pagesChap 3 Ecoult À Surf Libre Et Courbe de Remous 2016kkkPas encore d'évaluation
- Chapitre I, Généralités Sur La MDF PDFDocument6 pagesChapitre I, Généralités Sur La MDF PDFAIT SAID TaouesPas encore d'évaluation
- Chapitre 2 - STATIQUE DES FLUIDESDocument7 pagesChapitre 2 - STATIQUE DES FLUIDESntji sangarePas encore d'évaluation
- Hydro DynamiqueDocument4 pagesHydro DynamiqueBrahimKhalkiDrissiPas encore d'évaluation
- CPR Avec ConclusionDocument37 pagesCPR Avec ConclusionLeaPas encore d'évaluation
- 2019-20 l2 s4 MDF Cinematique-Des-fluidrs Partie-2. CoursDocument5 pages2019-20 l2 s4 MDF Cinematique-Des-fluidrs Partie-2. CoursAymen FakihPas encore d'évaluation
- MIHA 2016 CoursbiDocument44 pagesMIHA 2016 Coursbisaliou fayePas encore d'évaluation
- Cours de La Mécanique Des Fluides-Chapitre 3 - 221229 - 095422Document28 pagesCours de La Mécanique Des Fluides-Chapitre 3 - 221229 - 095422Moha mmed100% (1)
- Ressaut HydrauliqueDocument8 pagesRessaut HydrauliqueAicha ElmPas encore d'évaluation
- Chapitre 1 Hydraulique Des SolsDocument6 pagesChapitre 1 Hydraulique Des SolsMar WaPas encore d'évaluation
- Preparation DS 05Document8 pagesPreparation DS 05الدعم الجامعيPas encore d'évaluation
- TD3-Corrigé (2022)Document20 pagesTD3-Corrigé (2022)الدعم الجامعيPas encore d'évaluation
- Indiv SolutionDocument10 pagesIndiv Solutionالدعم الجامعيPas encore d'évaluation
- Examen - Janvier - 2020 (Copie)Document5 pagesExamen - Janvier - 2020 (Copie)الدعم الجامعيPas encore d'évaluation
- TD3 - V A Continues Corrigé (2022)Document25 pagesTD3 - V A Continues Corrigé (2022)الدعم الجامعيPas encore d'évaluation
- MQ - Contrôle Rattrapage SMP4 Avec Corrigé 19 - 20Document6 pagesMQ - Contrôle Rattrapage SMP4 Avec Corrigé 19 - 20الدعم الجامعيPas encore d'évaluation
- Etude de Prix Gros OeuvresDocument39 pagesEtude de Prix Gros Oeuvresالدعم الجامعيPas encore d'évaluation
- Corrigé TD 2 Svtu3 ProbaDocument20 pagesCorrigé TD 2 Svtu3 Probaالدعم الجامعيPas encore d'évaluation
- MQ - Controle SMP4!19!20 Avec CorrigéDocument6 pagesMQ - Controle SMP4!19!20 Avec Corrigéالدعم الجامعيPas encore d'évaluation
- MQ-SMC - Exam 16 Sept2020 + Corrigé Avec BarèmeDocument6 pagesMQ-SMC - Exam 16 Sept2020 + Corrigé Avec Barèmeالدعم الجامعيPas encore d'évaluation
- Controle MQ SMPC4!19!20Document4 pagesControle MQ SMPC4!19!20الدعم الجامعيPas encore d'évaluation
- MQ-SMC - Examen Ratt - 14oct2020 Avec Corrigé Et Barème DétailléDocument5 pagesMQ-SMC - Examen Ratt - 14oct2020 Avec Corrigé Et Barème Détailléالدعم الجامعيPas encore d'évaluation
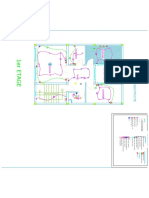
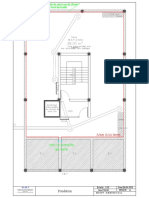
- Plan R+1 A JourDocument1 pagePlan R+1 A Jourالدعم الجامعيPas encore d'évaluation
- Semaine 03Document3 pagesSemaine 03الدعم الجامعيPas encore d'évaluation
- Designation Magic HouseDocument4 pagesDesignation Magic Houseالدعم الجامعيPas encore d'évaluation
- Metres Du PiscineDocument9 pagesMetres Du Piscineالدعم الجامعيPas encore d'évaluation
- Route Agdir Marrakech-ConvertiDocument14 pagesRoute Agdir Marrakech-Convertiالدعم الجامعيPas encore d'évaluation
- Profil TerrassementDocument2 pagesProfil Terrassementالدعم الجامعيPas encore d'évaluation
- Section 5 - 2019Aut-MEC2405 - Analyse limite-PDF-No - VideoDocument68 pagesSection 5 - 2019Aut-MEC2405 - Analyse limite-PDF-No - Videoالدعم الجامعيPas encore d'évaluation
- TD ExmDocument47 pagesTD Exmالدعم الجامعيPas encore d'évaluation
- Dimensionnement Et Verification de Dalle de Pont Routier (SIA)Document65 pagesDimensionnement Et Verification de Dalle de Pont Routier (SIA)audouin_lionelPas encore d'évaluation
- Métré Ayoub Fenétre PorteDocument69 pagesMétré Ayoub Fenétre Porteالدعم الجامعيPas encore d'évaluation
- Calcul D'agressivitéDocument4 pagesCalcul D'agressivitéالدعم الجامعي100% (1)
- Muneuiserie Bois AllDocument2 pagesMuneuiserie Bois Allالدعم الجامعيPas encore d'évaluation
- Cours Thermodynamique Physique - Chap0Document26 pagesCours Thermodynamique Physique - Chap0الدعم الجامعيPas encore d'évaluation
- Bpde CSP TrougoutDocument12 pagesBpde CSP Trougoutالدعم الجامعيPas encore d'évaluation
- TitiDocument3 pagesTitiالدعم الجامعيPas encore d'évaluation
- Mis A La TerreDocument1 pageMis A La Terreالدعم الجامعيPas encore d'évaluation
- Cours Thermodynamique Physique - Chap0Document26 pagesCours Thermodynamique Physique - Chap0الدعم الجامعيPas encore d'évaluation
- LG TotalDocument15 pagesLG Totalالدعم الجامعيPas encore d'évaluation
- TD CodageDocument2 pagesTD CodageTeuma Mbezi MichelPas encore d'évaluation
- GRILLE D AUDIT PostanalytiqueDocument11 pagesGRILLE D AUDIT PostanalytiqueSKPACAPas encore d'évaluation
- Les Pronoms en Et Y - Grammaire Delf A2Document4 pagesLes Pronoms en Et Y - Grammaire Delf A2Mondher DhahriPas encore d'évaluation
- Adjectif Verbal Et Participe Présent en FrançaisDocument37 pagesAdjectif Verbal Et Participe Présent en Françaisyoulmafia99Pas encore d'évaluation
- GrammaireDocument12 pagesGrammaireAnmol DhillonPas encore d'évaluation
- Manuel Du Pilote Genie de La Reaction1Document33 pagesManuel Du Pilote Genie de La Reaction1RandaPas encore d'évaluation
- Le Strabisme Cours Magistral FinalDocument59 pagesLe Strabisme Cours Magistral FinalNassim OuabouPas encore d'évaluation
- MandarineCE2 Guide Pedagogique Chapitre01Document19 pagesMandarineCE2 Guide Pedagogique Chapitre01Camille CousinPas encore d'évaluation
- Bohemien en VoyageDocument6 pagesBohemien en VoyageNeilPas encore d'évaluation
- BSG 1erDocument64 pagesBSG 1erAbdoulaye Djibril BabaPas encore d'évaluation
- Vertiges 2013 08 10 2013Document69 pagesVertiges 2013 08 10 2013Abdelmoumen DjazairiPas encore d'évaluation
- FSSPX-Rome - Appel Du Superieur Du District D'asieDocument3 pagesFSSPX-Rome - Appel Du Superieur Du District D'asieCaveNeCadasPas encore d'évaluation
- Activité 1: Les Médias Et La DémocratieDocument2 pagesActivité 1: Les Médias Et La DémocratielolaPas encore d'évaluation
- Généralités Com PharmacieDocument37 pagesGénéralités Com PharmacieMOHAMEDTAHA ZAHIRPas encore d'évaluation
- Chapitre 1 Analyse DescriptiveDocument4 pagesChapitre 1 Analyse Descriptivejubaar14Pas encore d'évaluation
- Myopathies Inflammatoires Idiopathiques DMDocument8 pagesMyopathies Inflammatoires Idiopathiques DMTtPas encore d'évaluation
- Grammatik13 Lieber BesserDocument2 pagesGrammatik13 Lieber BesserLasigo MokafiPas encore d'évaluation
- Les Lesions Elem PolycoDocument3 pagesLes Lesions Elem PolycoLarissa CompaorePas encore d'évaluation
- Science Vie Guerre R HistoireDocument132 pagesScience Vie Guerre R HistoireFlavio JúniorPas encore d'évaluation
- La Recherche 2022-10 pp138-139Document2 pagesLa Recherche 2022-10 pp138-139Virgule de GuillemetsPas encore d'évaluation
- Cna CanDocument5 pagesCna CanAnass GmiraPas encore d'évaluation
- Plan Étude PotionsDocument63 pagesPlan Étude PotionsMelPas encore d'évaluation
- MDT218AJ10ENC25Document8 pagesMDT218AJ10ENC25mordidomiPas encore d'évaluation
- 6 7271 4e59374d PDFDocument25 pages6 7271 4e59374d PDFSAEC LIBERTEPas encore d'évaluation
- ABC de La ChiromancieDocument47 pagesABC de La ChiromancieToky Andrianintsoa100% (1)