Vous aimerez peut-être aussi
- Cours - Fatigue Des MatériauxDocument49 pagesCours - Fatigue Des MatériauxMeddour Belkacem100% (1)
- Cours Liaisons Schema CinematiqueDocument20 pagesCours Liaisons Schema CinematiquekimPas encore d'évaluation
- Cours 2017 - rdm2 PDFDocument197 pagesCours 2017 - rdm2 PDFMahad AbdiPas encore d'évaluation
- MetrologieDocument227 pagesMetrologiemicipsa100% (4)
- (P. Agati - N. Mattera) Mecanique Appliquee - ResiDocument692 pages(P. Agati - N. Mattera) Mecanique Appliquee - ResiChaimaa EnnouhiPas encore d'évaluation
- Mip Map Doc-Prof MoukhtariDocument8 pagesMip Map Doc-Prof MoukhtariMeryemHmouri100% (1)
- Liaisons, Mécanismes Et Assemblages: Cours, Exercices Et Applications Industrielles Télécharger, Lire PDFDocument7 pagesLiaisons, Mécanismes Et Assemblages: Cours, Exercices Et Applications Industrielles Télécharger, Lire PDFMohamed Ouagga33% (3)
- Tolerances Cotation FonctionnelleDocument83 pagesTolerances Cotation Fonctionnelleأحمد الموريتاني100% (1)
- Conception Des Systemes MecaniquesDocument39 pagesConception Des Systemes MecaniquesElgoHoudaPas encore d'évaluation
- Modélisation Et Commande Adaptative D'un Bras Manipulateur Rigide À 2 Degré de LibertéDocument65 pagesModélisation Et Commande Adaptative D'un Bras Manipulateur Rigide À 2 Degré de LibertéAimen Belmahdi96% (23)
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- Procedes D'asemblageDocument85 pagesProcedes D'asemblageImed SeghierPas encore d'évaluation
- Cours N°1Document112 pagesCours N°1baPas encore d'évaluation
- Handbook - RDM, Mécanique Des Fluides, Thermodynamique (Dunod, 1996, 255P)Document255 pagesHandbook - RDM, Mécanique Des Fluides, Thermodynamique (Dunod, 1996, 255P)racha100% (3)
- Cours Liaison EncastrementDocument7 pagesCours Liaison EncastrementBIOS_012100% (2)
- IsostatismeDocument36 pagesIsostatismedidinedPas encore d'évaluation
- 1-Le Schéma Cinématique Des MécanismesDocument8 pages1-Le Schéma Cinématique Des MécanismesSegaAlainCoulibalyPas encore d'évaluation
- Polycope BaseDeLaRobotique 2018Document187 pagesPolycope BaseDeLaRobotique 2018ismail asfriPas encore d'évaluation
- Cours MicrDocument30 pagesCours MicrDOUNIAPas encore d'évaluation
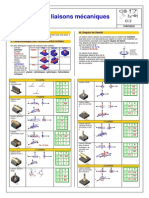
- Liaisons MecaniquesDocument7 pagesLiaisons MecaniquesaimanPas encore d'évaluation
- Mise en Position Des PiècesDocument32 pagesMise en Position Des PiècesCker Jo100% (1)
- Grignoteuse PortativeDocument6 pagesGrignoteuse PortativeYounes KaderPas encore d'évaluation
- 2 Liaisonsmcaniques 9 PagesDocument10 pages2 Liaisonsmcaniques 9 PagesbeniePas encore d'évaluation
- Liaisons Mecaniques PDFDocument9 pagesLiaisons Mecaniques PDFOmar BerkachePas encore d'évaluation
- 3 - Liaisons MecaniquesDocument6 pages3 - Liaisons MecaniquesYoucef MimouniPas encore d'évaluation
- Liaisons MecaniqueDocument39 pagesLiaisons MecaniqueHarouna MambonéPas encore d'évaluation
- Cours Techno I - Chapitre2Document26 pagesCours Techno I - Chapitre2kedadraomrane390Pas encore d'évaluation
- Construction MécaniqueDocument250 pagesConstruction MécaniqueSimo MabrouukPas encore d'évaluation
- Caractères de LiaisonDocument5 pagesCaractères de LiaisonGuy Effa100% (1)
- Les Liaisons Doc Prof MOUKHTARIDocument9 pagesLes Liaisons Doc Prof MOUKHTARIELMustaphaELMoukhtariPas encore d'évaluation
- Cours CT 1 Schematisation CinematiqueDocument5 pagesCours CT 1 Schematisation CinematiquePascal PonzoniPas encore d'évaluation
- 04AC12 - Liaisons - ProfDocument9 pages04AC12 - Liaisons - ProfMister PandaPas encore d'évaluation
- Chapitre 1Document6 pagesChapitre 1ademtalbi554Pas encore d'évaluation
- CAM - Rappel Sur Les Liaisons Mécaniques 1Document20 pagesCAM - Rappel Sur Les Liaisons Mécaniques 1Moslem ZariatPas encore d'évaluation
- Exposé Bureau D'etudesDocument29 pagesExposé Bureau D'etudesLaël HounsounonPas encore d'évaluation
- ASSIF LiaisonsDocument31 pagesASSIF LiaisonsMeryem TamirPas encore d'évaluation
- Chapitre 2Document10 pagesChapitre 2skaachPas encore d'évaluation
- Chapitre RDM 02Document13 pagesChapitre RDM 02Saliou Fall HdPas encore d'évaluation
- CoursDocument61 pagesCoursBen Aissa ChokriPas encore d'évaluation
- Les Liaisons Doc Prof 11Document9 pagesLes Liaisons Doc Prof 11brhamza39Pas encore d'évaluation
- 01 Chap 1 Hypotheses de La Resistance Des MateriauxDocument4 pages01 Chap 1 Hypotheses de La Resistance Des Materiauxm72054980Pas encore d'évaluation
- Chap2 LIAISONS MECANIQUESDocument13 pagesChap2 LIAISONS MECANIQUESAdams SamassiPas encore d'évaluation
- Modelisation Cinematique Des Mecanisme Doc ProfDocument7 pagesModelisation Cinematique Des Mecanisme Doc ProfNessou KampalPas encore d'évaluation
- Cours Éléments de Construction 2020-21Document84 pagesCours Éléments de Construction 2020-21Hassan BoufkerPas encore d'évaluation
- Liaisons MécaniquesDocument4 pagesLiaisons MécaniquesRhô ThalesPas encore d'évaluation
- Support de Cours Technologie MecaniqueDocument98 pagesSupport de Cours Technologie MecaniqueMATOUMBA PAULINPas encore d'évaluation
- Cours 2 - Initiation TechniqueDocument23 pagesCours 2 - Initiation Techniquenoonemr354Pas encore d'évaluation
- Composantes Des Competences Disciplinaires: Theme: Comportement Du Solide DeformableDocument25 pagesComposantes Des Competences Disciplinaires: Theme: Comportement Du Solide DeformableAhmed KhadimallahPas encore d'évaluation
- Chapitre I Les Fonctions Mécaniques Élémentaires: 1. La LiaisonDocument18 pagesChapitre I Les Fonctions Mécaniques Élémentaires: 1. La Liaisonhello youPas encore d'évaluation
- Meddour Fatigue MecaRupt WebDocument79 pagesMeddour Fatigue MecaRupt WebAbdelhakim EbdelliPas encore d'évaluation
- Chap2 LIAISONS MECANIQUESDocument13 pagesChap2 LIAISONS MECANIQUESSoro AchillePas encore d'évaluation
- Chap2 Liaisons Solides VAS2 Potel Gatignol PDFDocument11 pagesChap2 Liaisons Solides VAS2 Potel Gatignol PDFDamien MirandaPas encore d'évaluation
- Modélisation Actions Mecaniques 3 - Fiche RepèreDocument7 pagesModélisation Actions Mecaniques 3 - Fiche Repèrefernandez.ev91jeuxPas encore d'évaluation
- Volume 1Document366 pagesVolume 1Sandra PowersPas encore d'évaluation
- CoursMeddour F MatDocument50 pagesCoursMeddour F MatghodbanePas encore d'évaluation
- Resumé Cours MITPDocument13 pagesResumé Cours MITPMahdi BensalemPas encore d'évaluation
- Chapitre 1Document10 pagesChapitre 1Fayza 1008Pas encore d'évaluation
- Les Liaisons MécaniquesDocument18 pagesLes Liaisons MécaniquesTito FcbPas encore d'évaluation
- Chapitre IDocument10 pagesChapitre ISalah ZemaliPas encore d'évaluation
- Cours de RDM Chapitre 2 (Enseignant)Document13 pagesCours de RDM Chapitre 2 (Enseignant)kewouchristianjoel2003Pas encore d'évaluation
- 3 1 1 Modelisation Liaisons PDFDocument2 pages3 1 1 Modelisation Liaisons PDFMohammed ChaabatePas encore d'évaluation
- Resistance Des MateriauxDocument80 pagesResistance Des MateriauxChristian DinhoPas encore d'évaluation
- Liaison Encastrement S4Document12 pagesLiaison Encastrement S4Sangare SeydouPas encore d'évaluation
- Théorie Des Mécanismes L3Document15 pagesThéorie Des Mécanismes L3Shake SpearePas encore d'évaluation
- Cours RDM 2Document16 pagesCours RDM 2dhakerbenbachirPas encore d'évaluation
- Chapitre 1 - Liaisons Mécaniques - Partie 1Document4 pagesChapitre 1 - Liaisons Mécaniques - Partie 1Loic ReyesPas encore d'évaluation
- Technologie Construction2Document34 pagesTechnologie Construction2Ben Aissa Chokri100% (1)
- Détection de collision: Comprendre les intersections visuelles en vision par ordinateurD'EverandDétection de collision: Comprendre les intersections visuelles en vision par ordinateurPas encore d'évaluation
- Graphiques de tour: Explorer la manipulation visuelle dans les graphiques de tour grâce à la vision par ordinateurD'EverandGraphiques de tour: Explorer la manipulation visuelle dans les graphiques de tour grâce à la vision par ordinateurPas encore d'évaluation
- Evaluation Isostatisme PDFDocument4 pagesEvaluation Isostatisme PDFGenie Meca100% (1)
- SMA - RMA - Ch02-V01 - Liaisons Meca-EtudDocument19 pagesSMA - RMA - Ch02-V01 - Liaisons Meca-EtudChaima LajiliPas encore d'évaluation
- 3cours de Fabrication Usinage Par Enlèvement de CopeauxDocument7 pages3cours de Fabrication Usinage Par Enlèvement de CopeauxEtienne BouronPas encore d'évaluation
- Cours Chaine Energie Prof 2Document5 pagesCours Chaine Energie Prof 2ismailmebarkiPas encore d'évaluation
- Cour Tres InteressantDocument17 pagesCour Tres Interessantrzougarzouga100% (1)
- Modélisation Du ComportementDocument5 pagesModélisation Du ComportementNourdinr AbPas encore d'évaluation
- Support TD MecaAppli 2022 2023 GMDocument30 pagesSupport TD MecaAppli 2022 2023 GMnouhaila RahmouniPas encore d'évaluation
- Introduction NBDocument29 pagesIntroduction NBLarbi ElbakkaliPas encore d'évaluation
- M1101 - CM - Etude Des Mécanismes ExistantsDocument27 pagesM1101 - CM - Etude Des Mécanismes Existantschicagobullsfr0Pas encore d'évaluation
- La Mise en Position 1ere Partie de La Norme - PROFDocument6 pagesLa Mise en Position 1ere Partie de La Norme - PROFAbdelmoghit IdhsainePas encore d'évaluation
- Cours de Dynamique Des StructuresDocument52 pagesCours de Dynamique Des Structuresatlasm1008Pas encore d'évaluation
- Edilivre Analyse Des Structures Hyperstatiques Recueil D ExemplesDocument20 pagesEdilivre Analyse Des Structures Hyperstatiques Recueil D ExempleskovaryPas encore d'évaluation
- Mise en PositionDocument21 pagesMise en PositionYouness El Hamri100% (2)
- Phy 301Document78 pagesPhy 301MYMYPas encore d'évaluation
- Syandard SGN Seisme STD7342CDocument20 pagesSyandard SGN Seisme STD7342CGaston GérardPas encore d'évaluation
- RobotiqueDocument21 pagesRobotiqueAHMED BARNATPas encore d'évaluation
- Chap2 Sys A 1ddlDocument17 pagesChap2 Sys A 1ddlTi MaPas encore d'évaluation
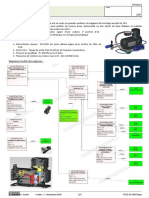
- Mini CompresseurDocument5 pagesMini CompresseurJawher Salem100% (1)
- Schéma CinématiqueDocument3 pagesSchéma CinématiquefakherPas encore d'évaluation