Vous aimerez peut-être aussi
- Examen de Robotique 3juin2018 (1167)Document2 pagesExamen de Robotique 3juin2018 (1167)mezianePas encore d'évaluation
- Ci02td 2Document5 pagesCi02td 2Samy BoujihaPas encore d'évaluation
- CI03 AD11 Corrigé - Déterminer Les Torseurs Cinétique Et Dynamique D'un Ensemble de Solide PDFDocument6 pagesCI03 AD11 Corrigé - Déterminer Les Torseurs Cinétique Et Dynamique D'un Ensemble de Solide PDFHaytem HirochimaPas encore d'évaluation
- TD 2 - 2021Document2 pagesTD 2 - 2021hiba gribaPas encore d'évaluation
- TD Dynamique MP-PSI Nov 23 - RugosimètreDocument2 pagesTD Dynamique MP-PSI Nov 23 - Rugosimètresalaheddinetalebhit3Pas encore d'évaluation
- Corrigé Ad1.a O5 - Déterminer Les Équations Du Mouvement D - Un MécanismeDocument12 pagesCorrigé Ad1.a O5 - Déterminer Les Équations Du Mouvement D - Un MécanismeNOUREDDINE OUSAIDPas encore d'évaluation
- RDM 1-2-3-4Document70 pagesRDM 1-2-3-4Thony LikengPas encore d'évaluation
- CNC Si MP 2011Document27 pagesCNC Si MP 2011salma ait aliPas encore d'évaluation
- Semestre 2 DS 4 2007-2008 Robot RRTDocument7 pagesSemestre 2 DS 4 2007-2008 Robot RRTLarbi ElbakkaliPas encore d'évaluation
- TD 27 - Modélisation Des AM de Contact PonctuelDocument6 pagesTD 27 - Modélisation Des AM de Contact PonctuelMohamed AbaakilPas encore d'évaluation
- CI02 TD05 Corrigé - Imposer Une VitesseDocument6 pagesCI02 TD05 Corrigé - Imposer Une VitesseKhaled JberiPas encore d'évaluation
- 0B W Sprn2GfpY2M2OTgwZWQtNTQ3OS00NzZhLWFlNjktZjdjNWRhMDEwNzY5Document2 pages0B W Sprn2GfpY2M2OTgwZWQtNTQ3OS00NzZhLWFlNjktZjdjNWRhMDEwNzY5Asma BousamePas encore d'évaluation
- Calcul D'intégrales: Université Mohammed Premier, OujdaDocument30 pagesCalcul D'intégrales: Université Mohammed Premier, OujdaMohamed AlPas encore d'évaluation
- EMD2 Mai 2001 PDFDocument7 pagesEMD2 Mai 2001 PDFAmine Ouared100% (1)
- CI02 TD03 Sujet - Interpréter Un Schéma CinématiqueDocument3 pagesCI02 TD03 Sujet - Interpréter Un Schéma CinématiqueKhaled JberiPas encore d'évaluation
- TD11 Modele Cinematique v2 PDFDocument4 pagesTD11 Modele Cinematique v2 PDFEdgard Adán Cieza EstelaPas encore d'évaluation
- TD2 - Cine - 2017 18Document4 pagesTD2 - Cine - 2017 18Wael YossraPas encore d'évaluation
- 14 TD Corrigé - Torseur Cinétique Et Torseur DynamiqueDocument7 pages14 TD Corrigé - Torseur Cinétique Et Torseur DynamiqueOut Of (Order)Pas encore d'évaluation
- M2102 TD CorrigésDocument103 pagesM2102 TD CorrigésAnonymous CyBP3KmQyL100% (1)
- Champ MagnétiqueDocument3 pagesChamp Magnétiquem0lcKy best playerPas encore d'évaluation
- Dombre ModlisationDocument50 pagesDombre ModlisationMooeez BellaaminePas encore d'évaluation
- TD2 Phy 203Document2 pagesTD2 Phy 203CedricPas encore d'évaluation
- Equilibrage DynamiqueDocument3 pagesEquilibrage DynamiqueMahran GuesmiPas encore d'évaluation
- Intégrales ElliptiquesDocument40 pagesIntégrales ElliptiquesScribd ReaderPas encore d'évaluation
- Chapitre 3 PDFDocument8 pagesChapitre 3 PDFAmd JedPas encore d'évaluation
- DS2 1Document5 pagesDS2 1Braxt MwIra GibecièrePas encore d'évaluation
- Joint de Cardan TDDocument4 pagesJoint de Cardan TDLaadim MarouanePas encore d'évaluation
- CC 2Document1 pageCC 2Hedi cherifPas encore d'évaluation
- Z H X A BA: Année Universitaire: 2018-2019 Nombre Des Pages: 2 (Documents Non Autorisés) 1 NiveauDocument2 pagesZ H X A BA: Année Universitaire: 2018-2019 Nombre Des Pages: 2 (Documents Non Autorisés) 1 NiveauDhiflaoui SaifPas encore d'évaluation
- CI02 TD03 Corrigé - Interpréter Un Schéma CinématiqueDocument6 pagesCI02 TD03 Corrigé - Interpréter Un Schéma CinématiqueKhaled JberiPas encore d'évaluation
- 2013 MP CCP Physique I-CorrigéDocument10 pages2013 MP CCP Physique I-CorrigéLarbi Badrour50% (2)
- Transformations Co Ordonne Es Geode Si QuesDocument15 pagesTransformations Co Ordonne Es Geode Si QuesIkram MouhibPas encore d'évaluation
- TD Révision Cinematique Du SolideDocument8 pagesTD Révision Cinematique Du SolideRomain MarroPas encore d'évaluation
- Chapitre 1 Les Équilibres Dans Les Massifs de Sols 2019 2020Document15 pagesChapitre 1 Les Équilibres Dans Les Massifs de Sols 2019 2020El Hadj Abdoulaye SECKu.Pas encore d'évaluation
- TD 09 Corrigé - Cinématique Analytique - Dérivation Vectorielle PDFDocument8 pagesTD 09 Corrigé - Cinématique Analytique - Dérivation Vectorielle PDFDon Yassine100% (2)
- Exercice CorrigéDocument3 pagesExercice CorrigéNAAZIHPas encore d'évaluation
- 11G18bisB1 S1 - S3Document2 pages11G18bisB1 S1 - S3GogoPas encore d'évaluation
- Examen Mcanique Gnrale 1GM Iset Nabeul 2010 PDFDocument4 pagesExamen Mcanique Gnrale 1GM Iset Nabeul 2010 PDFAbdallah JaoiadiPas encore d'évaluation
- Td Cinetique 1Document3 pagesTd Cinetique 1ahmedelkhandoukiPas encore d'évaluation
- Elements D'Inertie D'Un Solide: Iut Cachan - GMP 2 Cours de MécaniqueDocument3 pagesElements D'Inertie D'Un Solide: Iut Cachan - GMP 2 Cours de MécaniquemendperPas encore d'évaluation
- Travaux Dirigés Robotique 1 2020Document4 pagesTravaux Dirigés Robotique 1 2020marwa hamdiPas encore d'évaluation
- TD 20 Corrigé - Loi Entrée-Sortie À L'aide D'un Produit Scalaire Constant de Deux Vecteurs D'orientationDocument6 pagesTD 20 Corrigé - Loi Entrée-Sortie À L'aide D'un Produit Scalaire Constant de Deux Vecteurs D'orientationMönsîeur Abd NourPas encore d'évaluation
- Cours CompletDocument45 pagesCours Completsaida aliouaPas encore d'évaluation
- TD 1Document3 pagesTD 1Khalid Ahyeoud100% (1)
- CC1 2013 2014Document3 pagesCC1 2013 2014Maryamę Ęl JaoiharįPas encore d'évaluation
- RobInd TD1Document2 pagesRobInd TD1mezianePas encore d'évaluation
- 32 Loi Entrée Sortie Géométrique D 1Document6 pages32 Loi Entrée Sortie Géométrique D 1hsn frk100% (1)
- Physique 1Document5 pagesPhysique 1Ariss TiderPas encore d'évaluation
- TD 2 Ma 2018 VF1Document7 pagesTD 2 Ma 2018 VF1Mohamed Belbaraka100% (1)
- TDDocument6 pagesTDaabkaalPas encore d'évaluation
- TD1 Algebre AnalyseDocument2 pagesTD1 Algebre Analysetiti titiPas encore d'évaluation
- Cours Des Méthodes - Elem - Finis - IutDocument10 pagesCours Des Méthodes - Elem - Finis - IutHajar AkhzouzPas encore d'évaluation
- P Ex01 28 CM PDFDocument3 pagesP Ex01 28 CM PDFYoussef CoulibalyPas encore d'évaluation
- Ouvre Barriere SinusmaticDocument6 pagesOuvre Barriere SinusmaticmoumouPas encore d'évaluation
- Devoir Mécanique GénéraleDocument21 pagesDevoir Mécanique GénéraleLarbi Elbakkali88% (8)
- TD PolytechDocument9 pagesTD Polytechlahssane hmidatPas encore d'évaluation
- Rapport Pression CoupleDocument1 pageRapport Pression CouplemezianePas encore d'évaluation
- ClassificationDocument63 pagesClassificationmezianePas encore d'évaluation
- Livre2 v3Document28 pagesLivre2 v3mezianePas encore d'évaluation
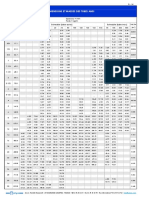
- Tableau Des Epaisseur ANSIDocument1 pageTableau Des Epaisseur ANSImezianePas encore d'évaluation
- testsUnitairesMatlab PDFDocument7 pagestestsUnitairesMatlab PDFmezianePas encore d'évaluation
- Bac A Lhuile SuiteDocument6 pagesBac A Lhuile SuitemezianePas encore d'évaluation
- Bac A Lhuile SuiteDocument6 pagesBac A Lhuile SuitemezianePas encore d'évaluation
- Informations MemoiresDocument1 pageInformations MemoiresmezianePas encore d'évaluation
- Informations MemoiresDocument1 pageInformations MemoiresmezianePas encore d'évaluation
- Information ms5002cDocument2 pagesInformation ms5002cmezianePas encore d'évaluation
- Chap2 RocheDocument19 pagesChap2 Rochestuka77Pas encore d'évaluation
- Information ms5002cDocument2 pagesInformation ms5002cmezianePas encore d'évaluation
- Information ms5002cDocument2 pagesInformation ms5002cmezianePas encore d'évaluation
- Chapitre V Méthodes D'implantation D'atelierDocument14 pagesChapitre V Méthodes D'implantation D'atelierMahdi AllaniPas encore d'évaluation
- QuizDocument3 pagesQuizDIBIPas encore d'évaluation
- ECS1: Applications Linéaires en Dimension Finie: Fichier Extrait Du DocumentDocument4 pagesECS1: Applications Linéaires en Dimension Finie: Fichier Extrait Du DocumentABRAHAM NENEPas encore d'évaluation
- Formation SEPEX: Support de Cours 2013-1Document252 pagesFormation SEPEX: Support de Cours 2013-1Firmin MAMBOUNDOUPas encore d'évaluation
- Un Mythe Moderne Des Signes Du Ciel by Jung Carl GustavDocument158 pagesUn Mythe Moderne Des Signes Du Ciel by Jung Carl GustavSouheila ChebelPas encore d'évaluation
- Corrige DNB Maths 2012Document5 pagesCorrige DNB Maths 2012lezondark 130Pas encore d'évaluation
- ExosupDocument4 pagesExosupHamza DhakerPas encore d'évaluation
- Bac-Blanc Ts 2023 VF Série DDocument3 pagesBac-Blanc Ts 2023 VF Série DNoah AbdelPas encore d'évaluation
- Chapitre4 Alimentation en Eau PotableDocument9 pagesChapitre4 Alimentation en Eau PotableTAFOPWA KAMDEMPas encore d'évaluation
- CC Blanc Corrige PDFDocument12 pagesCC Blanc Corrige PDFDavid KonanPas encore d'évaluation
- dm14 EV2Document13 pagesdm14 EV2othmane alaouiPas encore d'évaluation
- Calcul Trigonometrique 1 Serie D Exercices 1Document2 pagesCalcul Trigonometrique 1 Serie D Exercices 1Wijdane BelkhairPas encore d'évaluation
- These Nahal MouradDocument165 pagesThese Nahal MouradGCRIADHPas encore d'évaluation
- Cours Sur Le Séchage Thermique PDFDocument38 pagesCours Sur Le Séchage Thermique PDFDépartement Tronc Commun en Technologie100% (2)
- Fiche TD N°1Document2 pagesFiche TD N°1Chaima Agha100% (1)
- Expo EmpirismeDocument7 pagesExpo EmpirismeisaacPas encore d'évaluation
- Clonage Artificiel de L EmailDocument5 pagesClonage Artificiel de L EmailMalek abidiPas encore d'évaluation
- TFM Marocetude - Com M14 Technologie professionnelle-partie2-FM-TFMDocument69 pagesTFM Marocetude - Com M14 Technologie professionnelle-partie2-FM-TFMabdo rahimPas encore d'évaluation
- L2PS Ch3Document12 pagesL2PS Ch3James XgunPas encore d'évaluation
- Devoir de Synthèse N°1 2017 2018 (MR Mhamdi Fethi)Document3 pagesDevoir de Synthèse N°1 2017 2018 (MR Mhamdi Fethi)stefanPas encore d'évaluation
- Cours 16Document5 pagesCours 16BalalaŇaŖîfPas encore d'évaluation
- Commande Machines - Serie 2 - Exo 3Document2 pagesCommande Machines - Serie 2 - Exo 3Aya IrmaPas encore d'évaluation
- Capture D'écran . 2023-04-05 À 7.12.20 PMDocument8 pagesCapture D'écran . 2023-04-05 À 7.12.20 PMcheikhna lemrabettPas encore d'évaluation
- Philosophie Générale - Conscience Et IllusionDocument165 pagesPhilosophie Générale - Conscience Et IllusionJérémy Grenier-SpéroniPas encore d'évaluation
- Chapitre 1Document28 pagesChapitre 1Slim.BPas encore d'évaluation
- Etude Numerique Du Couplage Convection RayonnementDocument7 pagesEtude Numerique Du Couplage Convection Rayonnementachraf el manouarPas encore d'évaluation
- Rapprt de Thése Benmeziane SaraDocument142 pagesRapprt de Thése Benmeziane SaraMounir KriraaPas encore d'évaluation
- Jacques Attali - Les Trois Mondes - Pour Une Théorie de L'après-Crise-Fayard (1981)Document337 pagesJacques Attali - Les Trois Mondes - Pour Une Théorie de L'après-Crise-Fayard (1981)said bouda100% (1)
- Ch3 Repère PlanDocument2 pagesCh3 Repère Planأسير العالم المظلمPas encore d'évaluation
- Louvet 2014CLF22479Document207 pagesLouvet 2014CLF22479khalidPas encore d'évaluation