Vous aimerez peut-être aussi
- P 06 BC 1 eDocument12 pagesP 06 BC 1 eMihnea GamanPas encore d'évaluation
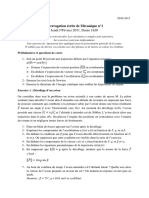
- DM nc2b01 de Mecc81canique de SolideDocument2 pagesDM nc2b01 de Mecc81canique de SolideCreche Le NidPas encore d'évaluation
- CNC 1987 MP PhysiqueDocument5 pagesCNC 1987 MP Physiqueanass grini100% (1)
- Polycopie de TD 2013Document70 pagesPolycopie de TD 2013hichamkabel100% (1)
- 2016-Interne IM CorrDocument29 pages2016-Interne IM CorrRachid FattahPas encore d'évaluation
- Energie Cinetique 1ere S Exercices CorrigesDocument3 pagesEnergie Cinetique 1ere S Exercices CorrigesabdougarbasalimPas encore d'évaluation
- Ensam Physique SVT 2012Document4 pagesEnsam Physique SVT 2012Zohra soulamiPas encore d'évaluation
- CCP 2004Document22 pagesCCP 2004Hafsa LamrabatPas encore d'évaluation
- Cours Energetique 2022-2023Document8 pagesCours Energetique 2022-2023Milliardaire RüssëPas encore d'évaluation
- Ie1 2011Document4 pagesIe1 2011redaPas encore d'évaluation
- 11710-corrige-sujet-bac-ssi-2018-nouvelle-caledonieDocument11 pages11710-corrige-sujet-bac-ssi-2018-nouvelle-caledonieThierry BlanquetPas encore d'évaluation
- MP2PCDocument16 pagesMP2PCMarc ZhengPas encore d'évaluation
- Wagonnet Sur Une PenteDocument13 pagesWagonnet Sur Une Pentem0lcKy best playerPas encore d'évaluation
- 2018 MP Sujet PhyDocument7 pages2018 MP Sujet Phymoaadsaad1968Pas encore d'évaluation
- TD MecaniqueDocument13 pagesTD MecaniqueSovann_Long80% (5)
- Travaux Dirigés de Mécanique N°4: Exercice 1: Calcul de MomentsDocument2 pagesTravaux Dirigés de Mécanique N°4: Exercice 1: Calcul de MomentsMbarek OmarPas encore d'évaluation
- 2006 Liban Exo1 Sujet Meca Logan 9ptsDocument7 pages2006 Liban Exo1 Sujet Meca Logan 9ptsMika DoPas encore d'évaluation
- 2006 Liban Exo1 Sujet Meca Logan 9ptsDocument7 pages2006 Liban Exo1 Sujet Meca Logan 9ptsbenkhaleqmaroua1Pas encore d'évaluation
- DS2 PcsiDocument8 pagesDS2 PcsiphollaPas encore d'évaluation
- Caplp GMV 2022 Sujet CopieDocument45 pagesCaplp GMV 2022 Sujet CopiejameuulPas encore d'évaluation
- CNC 2022 Mécanique de FluidesDocument6 pagesCNC 2022 Mécanique de Fluidesomarboulakhrif7Pas encore d'évaluation
- Mouvement Vitesse Acceleration - OdtDocument6 pagesMouvement Vitesse Acceleration - OdtBip2 BoupPas encore d'évaluation
- Exercices Partie1Document8 pagesExercices Partie1Paola CinnellaPas encore d'évaluation
- Prob 3eme 4MDocument4 pagesProb 3eme 4MHanine HmidaPas encore d'évaluation
- Chimie: Lycée de L'environnement Devoir de Contrôle #2 Sciences PhysiquesDocument6 pagesChimie: Lycée de L'environnement Devoir de Contrôle #2 Sciences PhysiquesIyed KhalfiPas encore d'évaluation
- Mécanique II - Examen 2017Document3 pagesMécanique II - Examen 2017bechir sidialyPas encore d'évaluation
- TD de Mécanique: Exercice N°1Document5 pagesTD de Mécanique: Exercice N°1Lengani Abdoul Kader100% (1)
- Corr PC Laayoune Sakia Hamraa 2019 FR (WWW - Pc1.ma)Document3 pagesCorr PC Laayoune Sakia Hamraa 2019 FR (WWW - Pc1.ma)Cours français facilePas encore d'évaluation
- Composition 1s1 2014 2015 Sem 1Document2 pagesComposition 1s1 2014 2015 Sem 1FRANCIS NDOURPas encore d'évaluation
- 2022 Amsud J2 Exo1 Sujet Airbag 10ptsDocument6 pages2022 Amsud J2 Exo1 Sujet Airbag 10ptsgrajzgrPas encore d'évaluation
- Devoir 4Document8 pagesDevoir 4Armaalik PelitoPas encore d'évaluation
- PH 2 ExostsDocument3 pagesPH 2 ExostsNajimou Alade TidjaniPas encore d'évaluation
- Corrige1 PDFDocument7 pagesCorrige1 PDFtiwazininePas encore d'évaluation
- BTS PHY 98 BisDocument7 pagesBTS PHY 98 BiskernoPas encore d'évaluation
- DM1Document5 pagesDM1bhsbhs19Pas encore d'évaluation
- Sujet Partie1 PDFDocument6 pagesSujet Partie1 PDFDODOHICHAMPas encore d'évaluation
- Centrale MP 2012 (Corrigé)Document11 pagesCentrale MP 2012 (Corrigé)Ibra Moulay100% (1)
- Exercices Rlts Corriges v2Document4 pagesExercices Rlts Corriges v2Soufi Badr100% (4)
- 4 MomentsDocument10 pages4 Momentssin9ed67bscPas encore d'évaluation
- Minesponts 2008 Phy1 MP PDFDocument4 pagesMinesponts 2008 Phy1 MP PDFAymen DanounPas encore d'évaluation
- Correction Spe SI 20.03Document6 pagesCorrection Spe SI 20.03LETUDIANT75% (4)
- Eléments de Correction: Problème 1: Etude Du Thames Barrière (1 H)Document12 pagesEléments de Correction: Problème 1: Etude Du Thames Barrière (1 H)Ilyas MhammediPas encore d'évaluation
- CNC 1992 MP PhysiqueDocument4 pagesCNC 1992 MP PhysiqueAbderrahman SrailPas encore d'évaluation
- L1 MVT TD1Document7 pagesL1 MVT TD1Aïmane CheikhPas encore d'évaluation
- CCP Sii MP 2007 EpreuveDocument18 pagesCCP Sii MP 2007 Epreuvehamza hamzaPas encore d'évaluation
- Travail Et Energie Cinetique Exercices Non Corriges 2 3Document7 pagesTravail Et Energie Cinetique Exercices Non Corriges 2 3Anas Adadi100% (1)
- Examen 160519 PDFDocument4 pagesExamen 160519 PDFhichPas encore d'évaluation
- Option: Spéciales C / P H Y S I Q U E / Durée: 2 Heures - Coefficient: 2Document5 pagesOption: Spéciales C / P H Y S I Q U E / Durée: 2 Heures - Coefficient: 2Az-eddine KaibaPas encore d'évaluation
- Terminale Controle7 BB Sujet2 CorrectionDocument23 pagesTerminale Controle7 BB Sujet2 Correctionm20263033Pas encore d'évaluation
- الفرض الأول في الفيزياء والكيمياء المسلك الدولي الأولى باك علوم رياضية 1)Document2 pagesالفرض الأول في الفيزياء والكيمياء المسلك الدولي الأولى باك علوم رياضية 1)KERARMICHAIMAE100% (3)
- Centre D'inertieDocument6 pagesCentre D'inertiefatalstivoxPas encore d'évaluation
- ds2 2006-2007 ÉnoncéDocument4 pagesds2 2006-2007 Énoncérazi bouallaguiPas encore d'évaluation
- 2009 Si Tsi GM PDFDocument6 pages2009 Si Tsi GM PDFma tlawa7ch el zeblaPas encore d'évaluation
- TD 1 Mécanique Du PointDocument4 pagesTD 1 Mécanique Du Pointyassir100% (1)
- Cellule SP 1 S1 2023-2024: Exercice 1Document3 pagesCellule SP 1 S1 2023-2024: Exercice 1mouhamadousylla053Pas encore d'évaluation
- Master cc1 1819Document4 pagesMaster cc1 1819Fatima Ezzahrae BOUITAPas encore d'évaluation
- Tpfluides L3Document14 pagesTpfluides L3Diae BenzekriPas encore d'évaluation
- Application Des Bases de La DynamiqueDocument7 pagesApplication Des Bases de La Dynamiqueb8rhk2thb4Pas encore d'évaluation
- CHIMIOTHERAPIEDocument3 pagesCHIMIOTHERAPIEcopie master100% (1)
- Cours N 6 (CH) Dosage Acido. (Élév) DocxDocument2 pagesCours N 6 (CH) Dosage Acido. (Élév) Docxcopie masterPas encore d'évaluation
- Chapitre 8 - HistoireDocument7 pagesChapitre 8 - Histoirecopie masterPas encore d'évaluation
- revisions-prof-copie-2Document1 pagerevisions-prof-copie-2copie masterPas encore d'évaluation
- Suites Numeriques Exercices Non Corriges 3 6Document6 pagesSuites Numeriques Exercices Non Corriges 3 6copie masterPas encore d'évaluation
- Physique I Mines MP 2008 ÉnoncéDocument4 pagesPhysique I Mines MP 2008 Énoncécopie masterPas encore d'évaluation
- P2 Polycopié Pédiatrie Endoc-Neuro-HématoDocument76 pagesP2 Polycopié Pédiatrie Endoc-Neuro-Hématocopie master100% (1)
- Suites Numeriques Exercices Non Corriges 3 6Document6 pagesSuites Numeriques Exercices Non Corriges 3 6copie masterPas encore d'évaluation
- Travaux Dirigés Série 6Document6 pagesTravaux Dirigés Série 6copie masterPas encore d'évaluation
- Les Composantes de La CommDocument2 pagesLes Composantes de La Commcopie masterPas encore d'évaluation
- Management Strateěgique Et Opeěrationnel MUS 2023Document25 pagesManagement Strateěgique Et Opeěrationnel MUS 2023copie masterPas encore d'évaluation
- Ds 2 Moulay YoussefDocument4 pagesDs 2 Moulay Youssefcopie masterPas encore d'évaluation
- ATELIER 1 (Intro Économie)Document2 pagesATELIER 1 (Intro Économie)copie masterPas encore d'évaluation
- Résumer Phy ADocument9 pagesRésumer Phy Acopie masterPas encore d'évaluation
- Chapitre 1.pdf Electronique NumeriqueDocument16 pagesChapitre 1.pdf Electronique Numeriquecopie masterPas encore d'évaluation
- Théorèmes D'approximation de WeierstrassDocument2 pagesThéorèmes D'approximation de Weierstrasscopie masterPas encore d'évaluation
- Exercice N°7 - Architecture D'ordinateur - Livres InformatiquesDocument2 pagesExercice N°7 - Architecture D'ordinateur - Livres Informatiquescopie masterPas encore d'évaluation
- Série 2 Electromagnétisme Spé 2023Document2 pagesSérie 2 Electromagnétisme Spé 2023copie masterPas encore d'évaluation
- Chimie Chapitre 2 Reactions Acido BasiquesDocument8 pagesChimie Chapitre 2 Reactions Acido Basiquescopie masterPas encore d'évaluation
- Série 6: Exercice 1Document2 pagesSérie 6: Exercice 1copie masterPas encore d'évaluation
- DL 1Document7 pagesDL 1copie masterPas encore d'évaluation
- Physique I Mines MP 2008 ÉnoncéDocument4 pagesPhysique I Mines MP 2008 Énoncécopie masterPas encore d'évaluation
- Fiche Pour Cour ConstititionelleDocument1 pageFiche Pour Cour Constititionellecopie masterPas encore d'évaluation
- Série 4 Electronique RSF CPGE 2023Document3 pagesSérie 4 Electronique RSF CPGE 2023copie masterPas encore d'évaluation
- DS02 CDocument12 pagesDS02 CbaatoutmbPas encore d'évaluation
- Cours Air HumideDocument66 pagesCours Air HumideBouchra BenPas encore d'évaluation
- Conception Et FonctionnementDocument20 pagesConception Et Fonctionnementkofane yakanaPas encore d'évaluation
- Distillation Flash PDFDocument14 pagesDistillation Flash PDFSarah sarahPas encore d'évaluation
- Chapitre IDocument91 pagesChapitre Iيحيى بورغدةPas encore d'évaluation
- Thermo en SetDocument63 pagesThermo en SetMeriem ChiboubPas encore d'évaluation
- TP 1 EnergetiqueDocument6 pagesTP 1 EnergetiqueElias BELAMALEMPas encore d'évaluation
- Fi Pathologie Batiment c07 Condensation Sous Face Couvertures MetalliquesDocument4 pagesFi Pathologie Batiment c07 Condensation Sous Face Couvertures MetalliquesFarid SAIDPas encore d'évaluation
- Rendement D'une ChaudièreDocument8 pagesRendement D'une ChaudièreJUST LEARNPas encore d'évaluation
- Conception 7Document12 pagesConception 7buzz filmsPas encore d'évaluation
- Le Concept de La Bioénergétique 2020 2021-ConvertiDocument10 pagesLe Concept de La Bioénergétique 2020 2021-ConvertiJacques Ahishakiye100% (1)
- BD Ventilation de Locaux TechniquesDocument2 pagesBD Ventilation de Locaux TechniquesSADJI RachidPas encore d'évaluation
- TD 11 MachineDocument2 pagesTD 11 MachineAIMAD ESSAKHIPas encore d'évaluation
- Seance1 Climatisation EHTPDocument44 pagesSeance1 Climatisation EHTPMouna OumihaPas encore d'évaluation
- Feuilles Prof - Changements D'états de La Matière - Définitive - 2ème CDocument31 pagesFeuilles Prof - Changements D'états de La Matière - Définitive - 2ème Cjonathan.burettePas encore d'évaluation
- Criteres AdimensionnelsDocument1 pageCriteres AdimensionnelsGomgnimbou AlphonsePas encore d'évaluation
- K Mansouri 2020Document57 pagesK Mansouri 2020Mourad MatmourPas encore d'évaluation
- Méthode UnifacDocument5 pagesMéthode UnifacDuboisPas encore d'évaluation
- CH5 Thermodynamique Melanges - Fin 2Document17 pagesCH5 Thermodynamique Melanges - Fin 2aymenlounnaciPas encore d'évaluation
- TP TiliouaDocument9 pagesTP TiliouazbounPas encore d'évaluation
- Ditra HeatDocument20 pagesDitra HeatMohamed LotfiPas encore d'évaluation
- Cours Froid Solaire MPons Part 1 2Document56 pagesCours Froid Solaire MPons Part 1 2Kãrîm KåhlìPas encore d'évaluation
- OFPTT Conception D Une Chambre FroideDocument69 pagesOFPTT Conception D Une Chambre FroideAziz Mokhles80% (15)
- Correction Exam 10janvier20 M1 GEPDocument8 pagesCorrection Exam 10janvier20 M1 GEPJenina ManksPas encore d'évaluation
- CHM108 Définitions Et Notions de BaseDocument5 pagesCHM108 Définitions Et Notions de BaseSam LessiPas encore d'évaluation
- Ben5230 PDFDocument137 pagesBen5230 PDFchiali samirPas encore d'évaluation
- Bilan Thermique Pour Chambre FroideDocument7 pagesBilan Thermique Pour Chambre Froideridhajamel100% (2)
- Echangeur de Chaleur Eau EauDocument10 pagesEchangeur de Chaleur Eau EauAycha TrabelsiPas encore d'évaluation
- L3 Thermo-ActivitéDocument24 pagesL3 Thermo-ActivitéDan Lunganga KabongoPas encore d'évaluation
- ResumeDocument2 pagesResumeMounaim Matini100% (1)