Vous aimerez peut-être aussi
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- Correction TD MASDocument12 pagesCorrection TD MASHassan Guenzaouz100% (4)
- GSEA23 G3EI21 Electrotechnique2 TD3Document2 pagesGSEA23 G3EI21 Electrotechnique2 TD3El Kaboss KaborePas encore d'évaluation
- E 2 TD Ms Extraits BacDocument4 pagesE 2 TD Ms Extraits BacOussamaPas encore d'évaluation
- QCM CorDocument7 pagesQCM CorBouzed26 SadekPas encore d'évaluation
- Modelisation - Machine Synchrone1Document39 pagesModelisation - Machine Synchrone1JihadJiji0% (1)
- TP MCCDocument7 pagesTP MCCPaul DayPas encore d'évaluation
- UntitledDocument4 pagesUntitledkaouther creationPas encore d'évaluation
- S1 - TD Sur Les Circuits en AC - 2021-2022Document9 pagesS1 - TD Sur Les Circuits en AC - 2021-2022Balayira BakaryPas encore d'évaluation
- BTS Phy 96Document12 pagesBTS Phy 96Abderrahmane WardiPas encore d'évaluation
- TD Machine Synchrone ETT4 2022Document4 pagesTD Machine Synchrone ETT4 2022Hamadi100% (2)
- tp1 Moteur SérieDocument3 pagestp1 Moteur SérieAb CdPas encore d'évaluation
- Fiche TD 03 Commade Electrique Master 2Document2 pagesFiche TD 03 Commade Electrique Master 2Motive -TechPas encore d'évaluation
- Reglage Vitesse MCCDocument3 pagesReglage Vitesse MCCrabietecPas encore d'évaluation
- TP 1: Commande D'Une Machine A Courant ContinuDocument7 pagesTP 1: Commande D'Une Machine A Courant Continuhakimchihab67% (3)
- BTS Et 2002 NoumeaDocument8 pagesBTS Et 2002 NoumeahbataPas encore d'évaluation
- TP Alternateur Correction SivertDocument9 pagesTP Alternateur Correction SivertFabrice NguefaPas encore d'évaluation
- Etude de La Machine Synchrone TriphaséeDocument28 pagesEtude de La Machine Synchrone TriphaséeAll SonPas encore d'évaluation
- Annexe SG3524Document55 pagesAnnexe SG3524abfstbmsod100% (4)
- Triphase TDDocument5 pagesTriphase TDfouad100% (2)
- TD de Production-1 - 074136Document8 pagesTD de Production-1 - 074136Lachance Awounang12Pas encore d'évaluation
- MEL GEL TD2-Machines SynchronesDocument4 pagesMEL GEL TD2-Machines SynchronesYounes BoubrahimPas encore d'évaluation
- TP 01Document19 pagesTP 01tete200414Pas encore d'évaluation
- Modélisation Et Simulation Du Moteur À Courant ContinuDocument5 pagesModélisation Et Simulation Du Moteur À Courant Continuعثمان عثمان100% (1)
- Ex MS2Document3 pagesEx MS2AZIZ DEROUICHPas encore d'évaluation
- Adaptation de Loi de PouilletDocument1 pageAdaptation de Loi de Pouilletacademie archimedePas encore d'évaluation
- Chapitre3 Technique de La Commande ÉlectriqueDocument11 pagesChapitre3 Technique de La Commande Électriqueاشر اقPas encore d'évaluation
- exoMS 1415Document16 pagesexoMS 1415Abd Errezak Chahoub0% (1)
- CH2 B PDFDocument10 pagesCH2 B PDFamine milanoPas encore d'évaluation
- Machine Synchrone PDFDocument4 pagesMachine Synchrone PDFMouad BenmoussaPas encore d'évaluation
- TD12 MCCDocument13 pagesTD12 MCCLucas AugierPas encore d'évaluation
- TP1Document2 pagesTP1Sid AliPas encore d'évaluation
- TP EP SimulationDocument4 pagesTP EP SimulationMARIAM ZEROUALIPas encore d'évaluation
- TD MSDocument4 pagesTD MSFakhreddine OkailPas encore d'évaluation
- Exo-Étude D'un Cas de Consommation D'énergie Réactive Déc 2021-1Document10 pagesExo-Étude D'un Cas de Consommation D'énergie Réactive Déc 2021-1Djillali MAHIPas encore d'évaluation
- TP OnduleurDocument6 pagesTP OnduleurMaman De BaraaPas encore d'évaluation
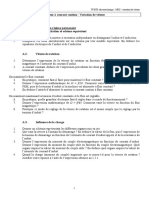
- 1 Etude Expérimentale: Terminale Génie Electrotechnique B-3-2-1-Conversion de Tension Continue en Courant ContinuDocument5 pages1 Etude Expérimentale: Terminale Génie Electrotechnique B-3-2-1-Conversion de Tension Continue en Courant ContinuKader SaidanePas encore d'évaluation
- TP07 Annexe2Document3 pagesTP07 Annexe2Abdallah BelabbesPas encore d'évaluation
- Couplages Réseaux de La MDocument10 pagesCouplages Réseaux de La MloveadalassPas encore d'évaluation
- Chapitre 1Document23 pagesChapitre 1akkal saadiPas encore d'évaluation
- Corrige TD Reseaux Triphases 1Document5 pagesCorrige TD Reseaux Triphases 1Sòumia El33% (3)
- TD Ic2 Eni Amc 19 20Document4 pagesTD Ic2 Eni Amc 19 20SANDOUIDI ZIWENDTAOREPas encore d'évaluation
- Moteur Synchrone Piloté À Fréquence VariableDocument1 pageMoteur Synchrone Piloté À Fréquence VariableLaura R.Pas encore d'évaluation
- TP Commande Des MachinesDocument21 pagesTP Commande Des MachinesTa Divika Hasterivy100% (1)
- 14 ExercicesDocument16 pages14 ExercicesMeryouma Larb100% (2)
- Part 2Document40 pagesPart 2Hassan HamiPas encore d'évaluation
- TP1 Machines ElectriqueDocument7 pagesTP1 Machines ElectriqueKarima YousfiPas encore d'évaluation
- TD N°3Document7 pagesTD N°3Nabil Mekimah100% (1)
- TD 2 - Moteurs Asynchrone TriphaséDocument4 pagesTD 2 - Moteurs Asynchrone TriphaséEsperance TchibindaPas encore d'évaluation
- TD MSDocument4 pagesTD MSGbah KONEPas encore d'évaluation
- TP 03 Commande Des Machines ElectriquesDocument14 pagesTP 03 Commande Des Machines Electriquesmoustapha.lahi04Pas encore d'évaluation
- TP1 AlternateurDocument4 pagesTP1 Alternateurأيمن ادريباتPas encore d'évaluation
- Compte Rendu Du TPDocument14 pagesCompte Rendu Du TPWiam WiwiPas encore d'évaluation
- BTS Et 2000 MetroDocument8 pagesBTS Et 2000 MetroAhmed Hamed100% (1)
- Amelioration de La Commande P and O ParDocument9 pagesAmelioration de La Commande P and O ParSushantPas encore d'évaluation
- Tp1 - Etude - Des Commandes PDFDocument5 pagesTp1 - Etude - Des Commandes PDFWA LidPas encore d'évaluation
- TP N°2 Commande D'un Moteur À Courant Continu Par Un Redresseur Monophasé Commandé Double Alternance - PD2Document4 pagesTP N°2 Commande D'un Moteur À Courant Continu Par Un Redresseur Monophasé Commandé Double Alternance - PD2marPas encore d'évaluation
- Analyse Circuits Electro P 2023 TDDocument14 pagesAnalyse Circuits Electro P 2023 TDpaul zawadiPas encore d'évaluation
- TD1 MSynchrone PDFDocument4 pagesTD1 MSynchrone PDFMouad Mouhout100% (2)
- TP1 Machine AsynchroneDocument1 pageTP1 Machine Asynchroneidoumou.abdemouPas encore d'évaluation
- Chapitre I - Introduction Générale Aux Entraînements ÉlectriquesDocument25 pagesChapitre I - Introduction Générale Aux Entraînements Électriquesidoumou.abdemouPas encore d'évaluation
- TD Electron I Quel 2Document135 pagesTD Electron I Quel 2HaitamElbathaoui100% (3)
- QCM1 (Erreur ! Source Du Renvoi Introuvable.) : Exercice 1Document7 pagesQCM1 (Erreur ! Source Du Renvoi Introuvable.) : Exercice 1idoumou.abdemouPas encore d'évaluation
- Partie 1: Régime Alternatif Sinusoïdal Monophasé: Exercice 1: Charge MonophaséeDocument7 pagesPartie 1: Régime Alternatif Sinusoïdal Monophasé: Exercice 1: Charge MonophaséemounaPas encore d'évaluation
- TPno3Mesured InductancesDocument5 pagesTPno3Mesured InductancesNassro Mim100% (2)
- L 3 YbaDocument38 pagesL 3 YbaSalah BerrhouPas encore d'évaluation
- Lois Des Circuits EleveDocument5 pagesLois Des Circuits ElevehamoudiPas encore d'évaluation
- DS Electro 2018Document5 pagesDS Electro 2018Malak elPas encore d'évaluation
- 法语建筑工程类词汇Document10 pages法语建筑工程类词汇levanalu7Pas encore d'évaluation
- Devoir APIDocument12 pagesDevoir APIHyacinthe KOSSIPas encore d'évaluation
- s2 sp2008 PDFDocument4 pagess2 sp2008 PDFIBRAHIMA NDIAYEPas encore d'évaluation
- Corrige DM1 PDFDocument7 pagesCorrige DM1 PDFBrandy OdonnellPas encore d'évaluation
- Les Mille Et Une Questions en Prépa - Questions Ouvertes de PhysiqueDocument516 pagesLes Mille Et Une Questions en Prépa - Questions Ouvertes de PhysiqueOmar ErrajiPas encore d'évaluation
- Openclassrooms ComDocument8 pagesOpenclassrooms ComLyes LellouchiPas encore d'évaluation
- Fernand Nathan - Manuel de Physique - Première C - Programme 1966Document387 pagesFernand Nathan - Manuel de Physique - Première C - Programme 1966Felix AFEKU100% (2)
- Chapitre 1 Lois de KirchhoffDocument13 pagesChapitre 1 Lois de KirchhoffHakimAliouaPas encore d'évaluation
- Série D'exercices de N°2 - Physique - Bac Math (2010-2011) MR Hedfi Khemais Bobines Et Dipôles RLDocument3 pagesSérie D'exercices de N°2 - Physique - Bac Math (2010-2011) MR Hedfi Khemais Bobines Et Dipôles RLMarouaneHaddad50% (2)
- RESDELUX FRDocument20 pagesRESDELUX FRZineddine ALICHEPas encore d'évaluation
- 4EME-PHY-CH3-COURS - Tension Électrique Et Intensité Du Courant - VF2Document55 pages4EME-PHY-CH3-COURS - Tension Électrique Et Intensité Du Courant - VF2hugotorresgarc2Pas encore d'évaluation
- Chapitre I - Notion de Chaîne de MesureDocument8 pagesChapitre I - Notion de Chaîne de Mesuredwe merPas encore d'évaluation
- TD SignauxDocument16 pagesTD Signauxzack slPas encore d'évaluation
- Corrigé Examen HT 2018-2019.TextMarkDocument3 pagesCorrigé Examen HT 2018-2019.TextMarkseltino100% (1)
- Exercices PC TC International 18 1Document13 pagesExercices PC TC International 18 1Physique MehdaouiPas encore d'évaluation
- R, Soit Une Bobine de Résistance R Et D'inductance L, Soit Un Condensateur de Capacité C. PourDocument3 pagesR, Soit Une Bobine de Résistance R Et D'inductance L, Soit Un Condensateur de Capacité C. Pourmehdi benmassoudPas encore d'évaluation
- Electricité GénéraleDocument100 pagesElectricité Généralekouassi jean kablanPas encore d'évaluation
- Cours - Sciences Physiques Oscillations Forcées - Bac Sciences Exp (2014-2015) MR Sdiri AnisDocument4 pagesCours - Sciences Physiques Oscillations Forcées - Bac Sciences Exp (2014-2015) MR Sdiri AnistorkitaherPas encore d'évaluation
- CH 1 Fonctions Electronique 2020Document31 pagesCH 1 Fonctions Electronique 2020hayfa mhamdiPas encore d'évaluation
- Livre Bleu PDFDocument228 pagesLivre Bleu PDFMostafa AnnakaPas encore d'évaluation
- Serie TDDocument5 pagesSerie TDZehra ElmouiniPas encore d'évaluation
- Exercices - Electricite 4.2 - Lois Tension Et IntensiteDocument4 pagesExercices - Electricite 4.2 - Lois Tension Et IntensiteNoraMatou50% (2)
- Electrocinétique - TD3: Régimes Transitoires: Moreggia PCSI 2011/2012Document2 pagesElectrocinétique - TD3: Régimes Transitoires: Moreggia PCSI 2011/2012zied houanebPas encore d'évaluation
- Guide de La Mesure D'isolementDocument9 pagesGuide de La Mesure D'isolementHamza SrhPas encore d'évaluation
- Paper Final CISTEM16 NassourDocument7 pagesPaper Final CISTEM16 NassourKamel NassourPas encore d'évaluation
- Améliorer votre mémoire: Un Guide pour l'augmentation de la puissance du cerveau, utilisant des techniques et méthodesD'EverandAméliorer votre mémoire: Un Guide pour l'augmentation de la puissance du cerveau, utilisant des techniques et méthodesÉvaluation : 5 sur 5 étoiles5/5 (2)
- Harmonisation Energétique des Personnes: Manuel de Curothérapie 2020D'EverandHarmonisation Energétique des Personnes: Manuel de Curothérapie 2020Évaluation : 4 sur 5 étoiles4/5 (8)
- 20 Véritables remèdes de nos grands-mères pour maigrir vite et enfin perdre du poidsD'Everand20 Véritables remèdes de nos grands-mères pour maigrir vite et enfin perdre du poidsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Revue des incompris revue d'histoire des oubliettes: Le Réveil de l'Horloge de Célestin Louis Maxime Dubuisson aliéniste et poèteD'EverandRevue des incompris revue d'histoire des oubliettes: Le Réveil de l'Horloge de Célestin Louis Maxime Dubuisson aliéniste et poèteÉvaluation : 3 sur 5 étoiles3/5 (3)
- Géobiologie de l'habitat et Géobiologie sacrée: Pour un lieu sainD'EverandGéobiologie de l'habitat et Géobiologie sacrée: Pour un lieu sainÉvaluation : 4.5 sur 5 étoiles4.5/5 (2)
- L'Art de la guerre: Traité de stratégie en 13 chapitres (texte intégral)D'EverandL'Art de la guerre: Traité de stratégie en 13 chapitres (texte intégral)Évaluation : 4 sur 5 étoiles4/5 (3032)
- Secrets ancestraux d'un maître guérisseur: Un sceptique occidental, un maître oriental et les plus grands secrets de la vieD'EverandSecrets ancestraux d'un maître guérisseur: Un sceptique occidental, un maître oriental et les plus grands secrets de la vieÉvaluation : 5 sur 5 étoiles5/5 (2)
- Le B.A.-Ba de la communication: Comment convaincre, informer, séduire ?D'EverandLe B.A.-Ba de la communication: Comment convaincre, informer, séduire ?Évaluation : 3 sur 5 étoiles3/5 (1)
- Technologie automobile: Les Grands Articles d'UniversalisD'EverandTechnologie automobile: Les Grands Articles d'UniversalisPas encore d'évaluation
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsD'EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Anatomie & 100 étirements essentiels: Techniques, Bénéfices attendus, Précautions à prendre, Conseils, Tableaux de séries, DouleursD'EverandAnatomie & 100 étirements essentiels: Techniques, Bénéfices attendus, Précautions à prendre, Conseils, Tableaux de séries, DouleursPas encore d'évaluation
- Mes inventions (Traduit): Autobiographie de Nikola TeslaD'EverandMes inventions (Traduit): Autobiographie de Nikola TeslaÉvaluation : 4.5 sur 5 étoiles4.5/5 (2)
- Production et propagation des sons: Les Grands Articles d'UniversalisD'EverandProduction et propagation des sons: Les Grands Articles d'UniversalisPas encore d'évaluation
- Affirmations positives : Perte de poids pour les femmesD'EverandAffirmations positives : Perte de poids pour les femmesPas encore d'évaluation
- Transformez votre vie: Utilisez le pouvoir créateur qui est en vous pour construire votre vie à l'image de ce que vous voulez qu'elle soitD'EverandTransformez votre vie: Utilisez le pouvoir créateur qui est en vous pour construire votre vie à l'image de ce que vous voulez qu'elle soitÉvaluation : 4 sur 5 étoiles4/5 (14)
- Conception & Modélisation CAO: Le guide ultime du débutantD'EverandConception & Modélisation CAO: Le guide ultime du débutantPas encore d'évaluation
- Bioénergie et Sciences Occultes: Pour un corps sain et un esprit sain dans un lieu sainD'EverandBioénergie et Sciences Occultes: Pour un corps sain et un esprit sain dans un lieu sainÉvaluation : 4 sur 5 étoiles4/5 (2)
- La vie des abeilles: Prix Nobel de littératureD'EverandLa vie des abeilles: Prix Nobel de littératureÉvaluation : 4 sur 5 étoiles4/5 (41)
- Physique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresD'EverandPhysique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresÉvaluation : 5 sur 5 étoiles5/5 (2)
- Le profilage au service du football: Démarche scientifique pour un recrutement et entraînements optimisésD'EverandLe profilage au service du football: Démarche scientifique pour un recrutement et entraînements optimisésPas encore d'évaluation