Vous aimerez peut-être aussi
- Utex Pack Mma300024 4Document16 pagesUtex Pack Mma300024 4Hicham BouzidiPas encore d'évaluation
- 5 Differentes Technologies Pro PDFDocument44 pages5 Differentes Technologies Pro PDFbaptichosendyPas encore d'évaluation
- Proportionaltechnik FRDocument20 pagesProportionaltechnik FRWassim DjouadiPas encore d'évaluation
- ADOUCISSEUR NOTICE D EMPLOI - PHPDocument9 pagesADOUCISSEUR NOTICE D EMPLOI - PHPJean-Yves BARIODPas encore d'évaluation
- Catalogo WLDocument28 pagesCatalogo WLjose leonPas encore d'évaluation
- Cibano 500: Équipement de Test 3-En-1 Pour Disjoncteurs Moyenne Et Haute TensionDocument28 pagesCibano 500: Équipement de Test 3-En-1 Pour Disjoncteurs Moyenne Et Haute Tensionmohamed anasPas encore d'évaluation
- TP 5 Cablage Circuit PneumatiqueDocument6 pagesTP 5 Cablage Circuit PneumatiqueYoussef LANDOLSIPas encore d'évaluation
- Controle Niveau Modulaire Notice 00Document2 pagesControle Niveau Modulaire Notice 00ADEL NOUFELPas encore d'évaluation
- Materiel PneumatiqueDocument5 pagesMateriel PneumatiqueKANTE SOUMPas encore d'évaluation
- Hydraulique - ProportionnelleDocument12 pagesHydraulique - Proportionnellejasim hamadPas encore d'évaluation
- 03 Constitutuion Generale Des CircuitsDocument5 pages03 Constitutuion Generale Des Circuitsnadaberradi2005Pas encore d'évaluation
- Controle de Niveau Pour Liquides Faiblement Conducteurs Séries Dnea / PneaDocument4 pagesControle de Niveau Pour Liquides Faiblement Conducteurs Séries Dnea / PneaAlex AngoraPas encore d'évaluation
- TP N 5 Cablage D Un Circuit Pneumatique Sur Banc FestoDocument13 pagesTP N 5 Cablage D Un Circuit Pneumatique Sur Banc FestoNicola VitulliPas encore d'évaluation
- Chapitre 03 AutomatiqueDocument7 pagesChapitre 03 AutomatiquesekPas encore d'évaluation
- Mesure Résistance Circuit Principal PDFDocument6 pagesMesure Résistance Circuit Principal PDFSalah BoukeffaPas encore d'évaluation
- Manuel Programmeur Azud 12vdcDocument24 pagesManuel Programmeur Azud 12vdcAyoub SabirPas encore d'évaluation
- Je Partage MSM 900-A Avec VousDocument20 pagesJe Partage MSM 900-A Avec VousabdelPas encore d'évaluation
- ELECTRICITE BatimentDocument78 pagesELECTRICITE BatimentShynaïder Tanis100% (1)
- df758 02Document2 pagesdf758 02Abdesselam DaghdaghePas encore d'évaluation
- C12 - Appareillage de Commande Et de Protection: Avant-Propos: Arc Électrique À L'ouverture D'un CircuitDocument19 pagesC12 - Appareillage de Commande Et de Protection: Avant-Propos: Arc Électrique À L'ouverture D'un CircuitHorch NadjetPas encore d'évaluation
- 4 PneumatiqueDocument27 pages4 Pneumatiquebénedo TangaPas encore d'évaluation
- Schéma IndustrielDocument50 pagesSchéma IndustrielMaguette SeckPas encore d'évaluation
- TP 4 Cablage Circuit Hydraulique PDFDocument17 pagesTP 4 Cablage Circuit Hydraulique PDFKhaoula Zefane0% (1)
- Appareils en HTDocument9 pagesAppareils en HTRakotojaona HajanirinaPas encore d'évaluation
- S6 1 Applications Circuits Pneumatiques CorrigesDocument29 pagesS6 1 Applications Circuits Pneumatiques CorrigesSaad StPas encore d'évaluation
- X1410allegatoMANUALE UTENTE1 4X Tableau Commande Chargement Pellet 10.17Document32 pagesX1410allegatoMANUALE UTENTE1 4X Tableau Commande Chargement Pellet 10.17Eddy BarbierPas encore d'évaluation
- Automatisme - Le Pneumatique WWW Cours-Electromecanique ComDocument30 pagesAutomatisme - Le Pneumatique WWW Cours-Electromecanique ComOmar Rajhi100% (3)
- Electrovanne PDFDocument3 pagesElectrovanne PDFSection Maintenance LP-Blériot100% (1)
- Travaux-Diriges Apparaillage ElectriqueDocument21 pagesTravaux-Diriges Apparaillage Electriqueibra sangPas encore d'évaluation
- Metriso 5000Document4 pagesMetriso 5000DJEDDIPas encore d'évaluation
- DS AC0801 Archived FR FR 50083Document24 pagesDS AC0801 Archived FR FR 50083business SAWADOGOPas encore d'évaluation
- DP Rec4 FRDocument8 pagesDP Rec4 FRsaied_2Pas encore d'évaluation
- RM4TR32 DATASHEET FR FR-FRDocument8 pagesRM4TR32 DATASHEET FR FR-FRKadj Slimane AbdelkaderPas encore d'évaluation
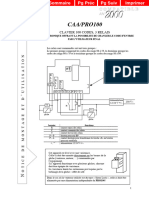
- Clavier A codes-CAA-PRO100 3RL Article 16045010Document5 pagesClavier A codes-CAA-PRO100 3RL Article 16045010Oli LurquinPas encore d'évaluation
- VA22.monfrDocument8 pagesVA22.monfrousplays MRCPas encore d'évaluation
- Systeme Excitation Etape BDocument45 pagesSysteme Excitation Etape BderbalijalelPas encore d'évaluation
- Hydraulique ProprtionnelleDocument97 pagesHydraulique ProprtionnelleAhmed KhalilPas encore d'évaluation
- Niveau MagnetiqueDocument1 pageNiveau Magnetiquesosi2020Pas encore d'évaluation
- Pluri TD Pneu ScieDocument9 pagesPluri TD Pneu ScieKuate RenePas encore d'évaluation
- Hydraulique Industrielle GMDocument66 pagesHydraulique Industrielle GMfabisotresPas encore d'évaluation
- Regulador Electronico Temperatura THP482 - FRDocument7 pagesRegulador Electronico Temperatura THP482 - FRRaúl Ayamamani0% (1)
- L3-GIM - TD-12-Hydraulique ProportionnelleDocument3 pagesL3-GIM - TD-12-Hydraulique Proportionnellemohamed bensalemPas encore d'évaluation
- Bilan - Revision 2 CORRIGEDocument8 pagesBilan - Revision 2 CORRIGEprojet pythonPas encore d'évaluation
- Reguamont RamusDocument9 pagesReguamont RamusCherif GhalebPas encore d'évaluation
- 11-05-018-00-Rele Buchholz Vem Et EmbDocument6 pages11-05-018-00-Rele Buchholz Vem Et EmbsoltaniPas encore d'évaluation
- Moteur Protection Et CommandeDocument14 pagesMoteur Protection Et CommandeDjamal Zenaidi100% (1)
- Capteurs ReglageDocument15 pagesCapteurs ReglageJean-michel HuetPas encore d'évaluation
- RelaisDocument25 pagesRelaisLEBONGOPas encore d'évaluation
- Cours Schémas Et Appareillages Electriques - L3 ELM ELT - 2016 2017 - A. LAIFAOUIDocument114 pagesCours Schémas Et Appareillages Electriques - L3 ELM ELT - 2016 2017 - A. LAIFAOUIAnas SawalhaPas encore d'évaluation
- Harmony Control - RM4UB35Document8 pagesHarmony Control - RM4UB35haroldPas encore d'évaluation
- MER86 - Manipulation 2 - Relais de SurintensitéDocument5 pagesMER86 - Manipulation 2 - Relais de SurintensitéadnanPas encore d'évaluation
- Batterie Condo AlpistaticDocument18 pagesBatterie Condo AlpistaticMedrouaPas encore d'évaluation
- Juki SC-20, - 120, - 220, - 320 Engineer's ManualDocument92 pagesJuki SC-20, - 120, - 220, - 320 Engineer's ManualJean JerezPas encore d'évaluation
- 1 AppareillageDocument19 pages1 AppareillageLeNINJAPas encore d'évaluation
- Pneumatique 1-.Document30 pagesPneumatique 1-.Elkhamsa AyoubPas encore d'évaluation
- Exemplaire Dun Mémoire Composition 2Document28 pagesExemplaire Dun Mémoire Composition 2OthmanPas encore d'évaluation
- 205Document8 pages205OthmanPas encore d'évaluation
- Atf 30 2LDocument17 pagesAtf 30 2LOthman100% (1)
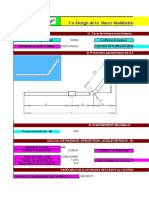
- Co-Design BarreDocument6 pagesCo-Design BarreOthmanPas encore d'évaluation
- PA AUDIT Processus 102008Document2 pagesPA AUDIT Processus 102008OthmanPas encore d'évaluation
- Département Des Sciences Appliquées: Amélioration de Fiabilité D'un Système HydrauliqueDocument144 pagesDépartement Des Sciences Appliquées: Amélioration de Fiabilité D'un Système HydrauliqueOthmanPas encore d'évaluation
- 05 BP Intervention Pompes EngrenagesDocument8 pages05 BP Intervention Pompes EngrenagesOthmanPas encore d'évaluation
- Proprete Huile ISO 4406Document2 pagesProprete Huile ISO 4406OthmanPas encore d'évaluation
- BTS COURS Cout de PossessionDocument5 pagesBTS COURS Cout de PossessionOthman100% (1)
- MSG30-3245 FR PDFDocument64 pagesMSG30-3245 FR PDFOthmanPas encore d'évaluation
- Fisli Samir PDFDocument66 pagesFisli Samir PDFOthmanPas encore d'évaluation
- Pompes Serie TXV PDFDocument16 pagesPompes Serie TXV PDFOthmanPas encore d'évaluation
- These Djihed Bensaad 2019 PDFDocument155 pagesThese Djihed Bensaad 2019 PDFOthmanPas encore d'évaluation
- 04 - Panorama Des Diffã©rentes PompesDocument94 pages04 - Panorama Des Diffã©rentes PompesOthmanPas encore d'évaluation
- Notions D HydrauliqueDocument28 pagesNotions D HydrauliqueOthmanPas encore d'évaluation
- 4A25 40F Frein SuspDocument42 pages4A25 40F Frein SuspAli ZerifiPas encore d'évaluation
- TD03 Et CorrectionDocument4 pagesTD03 Et Correctionboukharirahim31Pas encore d'évaluation
- Rapport de StageDocument48 pagesRapport de StageAbidi SaifPas encore d'évaluation
- Manuel MAVD - 1802-2202 - MAVDV - 1802-2202 - 2922711790 1Document104 pagesManuel MAVD - 1802-2202 - MAVDV - 1802-2202 - 2922711790 1Styve Duran MboulouPas encore d'évaluation
- 146 S - Présentation Du Moteur 3456EDocument69 pages146 S - Présentation Du Moteur 3456ENinou VivanoPas encore d'évaluation
- TD ABS CorrigéDocument8 pagesTD ABS CorrigéBROCHIERPas encore d'évaluation
- PT Catalog 2019 PT1901 Hydraulic Accessories FRDocument34 pagesPT Catalog 2019 PT1901 Hydraulic Accessories FRmathiouze88Pas encore d'évaluation
- 3453 Dossier Technique Epreuve E11 Bac Pro CC 2013Document11 pages3453 Dossier Technique Epreuve E11 Bac Pro CC 2013Fathia Falah YanesPas encore d'évaluation
- TD1 Bouee Houlomotrice BisDocument8 pagesTD1 Bouee Houlomotrice BiselkabbabiyPas encore d'évaluation
- NE360 Manuel Utilisation DinamixDocument29 pagesNE360 Manuel Utilisation DinamixJean-Marc DuboisPas encore d'évaluation
- SHP - Valves de Controle de PressionDocument27 pagesSHP - Valves de Controle de Pressionfranck nzauPas encore d'évaluation
- Koufi DjamelDocument85 pagesKoufi Djamelعبد الصمد بعاجPas encore d'évaluation
- Examen 2Document12 pagesExamen 2kndtandian96Pas encore d'évaluation
- Les Solutions Pour L'HABITAT: 1 MARS 2022Document110 pagesLes Solutions Pour L'HABITAT: 1 MARS 2022Driss SouissiPas encore d'évaluation
- Guide Selection Clapets Antiretour BayardDocument32 pagesGuide Selection Clapets Antiretour BayardAkkad AhmedPas encore d'évaluation
- Cours Complet HydrauliqueDocument180 pagesCours Complet HydrauliqueMoncef NemriPas encore d'évaluation
- Module - AEP v2022Document15 pagesModule - AEP v2022Audtrey TsilovaPas encore d'évaluation
- 4 CoiledTubingDocument78 pages4 CoiledTubingbabasidi AbderazakPas encore d'évaluation
- 268 S - Transmission Des M300CDocument61 pages268 S - Transmission Des M300Ctmasaouete hillalPas encore d'évaluation
- 274 S - Orientation Et Translation Pelles Chaine CDocument56 pages274 S - Orientation Et Translation Pelles Chaine CJunior MatondoPas encore d'évaluation
- 05 RH-200 PilotageDocument37 pages05 RH-200 Pilotagemedkh0411Pas encore d'évaluation
- Brassard-Ceinture Évolutif TISWIM Bleu Imprimé ZEBRO 15-30 KG NABAIJI DecathlonDocument1 pageBrassard-Ceinture Évolutif TISWIM Bleu Imprimé ZEBRO 15-30 KG NABAIJI DecathlonHalima LaskariPas encore d'évaluation
- Rapport de Stage de Perfectionnement: Département Génie ElectriqueDocument34 pagesRapport de Stage de Perfectionnement: Département Génie ElectriqueYassine MejriPas encore d'évaluation
- TM Case 5-621e FRDocument140 pagesTM Case 5-621e FRMoncef Lazaar100% (1)
- 284 S-Circuit de Pilotage 307CDocument25 pages284 S-Circuit de Pilotage 307CJunior MatondoPas encore d'évaluation
- MT S2 Esquema HidraulicoDocument100 pagesMT S2 Esquema HidraulicoRubem MichelPas encore d'évaluation
- GD825A-2 - Description - FonctionnementDocument97 pagesGD825A-2 - Description - FonctionnementMed Ekah100% (1)
- Hydrauliques 02Document74 pagesHydrauliques 02Leçons GuitarPas encore d'évaluation
- Atlas Copco Compresseurs D'air Stationnaires: GA30 - GA37 - GA45 - GA55C GA30 W - GA37 W - GA45 WDocument41 pagesAtlas Copco Compresseurs D'air Stationnaires: GA30 - GA37 - GA45 - GA55C GA30 W - GA37 W - GA45 WChihani AdelPas encore d'évaluation
- Equipement Des Travaux de Reparation EtDocument32 pagesEquipement Des Travaux de Reparation EtVictor MartinezPas encore d'évaluation