Vous aimerez peut-être aussi
- A propos du Digital!: Le digital pour tous! Le numérique en questions/réponses pour le modélisme ferroviaireD'EverandA propos du Digital!: Le digital pour tous! Le numérique en questions/réponses pour le modélisme ferroviaireÉvaluation : 3.5 sur 5 étoiles3.5/5 (3)
- Capteurs Intelligents Part2Document116 pagesCapteurs Intelligents Part2Simo AbkariPas encore d'évaluation
- UntitledDocument56 pagesUntitledmohaPas encore d'évaluation
- Rapport de CapteursDocument40 pagesRapport de CapteursfranckPas encore d'évaluation
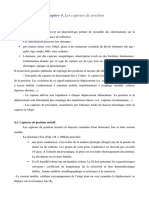
- Chapitre - 04 - Capteur de PositionDocument7 pagesChapitre - 04 - Capteur de Positionmiss khan100% (1)
- Atc 2022-2023Document96 pagesAtc 2022-2023Oh HichamPas encore d'évaluation
- 02-Mesure de Grandeur Non Électrique - P 2012Document86 pages02-Mesure de Grandeur Non Électrique - P 2012kamarou illoPas encore d'évaluation
- Capteur de TempératureDocument61 pagesCapteur de TempératureYahyaMoummouPas encore d'évaluation
- Capteur de PositionDocument17 pagesCapteur de PositionboudiarPas encore d'évaluation
- Capteurs 2Document29 pagesCapteurs 2Walid MechriPas encore d'évaluation
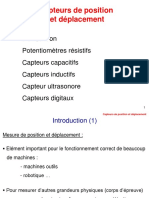
- Capteurs Position DeplacementDocument79 pagesCapteurs Position DeplacementzataraPas encore d'évaluation
- Cours Capteurs 2020 Part3Document22 pagesCours Capteurs 2020 Part3Balhoudi HelmiPas encore d'évaluation
- Capteurs Et Chaine D InstrumentationDocument48 pagesCapteurs Et Chaine D Instrumentationرجل من أقصى المدينةPas encore d'évaluation
- 1 Electronique Analogique - 1 - 1ere Année - UTMDocument111 pages1 Electronique Analogique - 1 - 1ere Année - UTMouedraogobensaadPas encore d'évaluation
- Capteurs de Position Et de DéplacementDocument9 pagesCapteurs de Position Et de Déplacementbelad100% (1)
- Partie 1 - Chaine de MesureDocument21 pagesPartie 1 - Chaine de MesurekaddahabiboPas encore d'évaluation
- 6 Lecon 6Document46 pages6 Lecon 6Chi RazPas encore d'évaluation
- Cours CAPT 11 HergliDocument35 pagesCours CAPT 11 Herglirochdi JEDIDIPas encore d'évaluation
- Transducteurs 1 - Capteurs PDFDocument27 pagesTransducteurs 1 - Capteurs PDFpierre_maréchalPas encore d'évaluation
- DS LRT8 FR 50118345Document4 pagesDS LRT8 FR 50118345Abdou DEPas encore d'évaluation
- CourscapteursDocument6 pagesCourscapteursAmina Ben0% (1)
- Capteur RésuméDocument12 pagesCapteur RésuméFadwa GHANIPas encore d'évaluation
- Capteur de PostionDocument19 pagesCapteur de PostionAhmed JguirimPas encore d'évaluation
- Chap1 CapAct SIIOT ISI - Partie 2Document27 pagesChap1 CapAct SIIOT ISI - Partie 2mohamed amine boukariPas encore d'évaluation
- 828 Lescapteurs 2 SteDocument10 pages828 Lescapteurs 2 SteichoualanePas encore d'évaluation
- CourscapteursDocument6 pagesCourscapteursabdouPas encore d'évaluation
- Cours Electronique Analogique Fsts Chapitre 3Document28 pagesCours Electronique Analogique Fsts Chapitre 3fatima zahra ettalhyPas encore d'évaluation
- Les Principes de Fonctionnement Des CapteursDocument16 pagesLes Principes de Fonctionnement Des CapteursOmar LebloulPas encore d'évaluation
- L3emb Be643Document5 pagesL3emb Be643Zendagui MohamedPas encore d'évaluation
- AtcDocument68 pagesAtcAFADPas encore d'évaluation
- Cours4 ForceDocument16 pagesCours4 ForcemarwitosPas encore d'évaluation
- Les Capteurs de Déplacements VERSION 1Document8 pagesLes Capteurs de Déplacements VERSION 1Oudjoud KeddourPas encore d'évaluation
- Cours 1 2020Document37 pagesCours 1 2020Th moranPas encore d'évaluation
- 3 Lecon 3Document39 pages3 Lecon 3Willybrood FonckPas encore d'évaluation
- TP L1 MpisDocument9 pagesTP L1 MpisAbde DilamPas encore d'évaluation
- TP2 Capteur de Deplacement ResistifDocument2 pagesTP2 Capteur de Deplacement Resistifnait ouslimane AhmedPas encore d'évaluation
- Schéma IndustrielDocument50 pagesSchéma IndustrielMaguette SeckPas encore d'évaluation
- Cours Convertisseur StatiqueDocument34 pagesCours Convertisseur Statiquerachida zounaibiPas encore d'évaluation
- Chapitre 1 - Introduction A La Régulation CompléDocument23 pagesChapitre 1 - Introduction A La Régulation Complékaoutaramr8Pas encore d'évaluation
- 2ATC EleveDocument94 pages2ATC EleveFarid OufqirPas encore d'évaluation
- Gnralits Sur Les Capteurs 2Document52 pagesGnralits Sur Les Capteurs 2Anouar AleyaPas encore d'évaluation
- COURS00 Capteur Industriel EDocument42 pagesCOURS00 Capteur Industriel Eabdelkader bouchikhiPas encore d'évaluation
- Chapitre 3Document4 pagesChapitre 3mounaPas encore d'évaluation
- Tableau Des Séries de Valeurs Normalisées E3 À E96Document5 pagesTableau Des Séries de Valeurs Normalisées E3 À E96senin pernidaPas encore d'évaluation
- Chapitre 4 - IM - RIoT2Document9 pagesChapitre 4 - IM - RIoT2Abd'Errahmen MharbiPas encore d'évaluation
- Elec 1Document5 pagesElec 1Ernest AdouPas encore d'évaluation
- Chapitre 2 Généralités Sur Les CapteursDocument10 pagesChapitre 2 Généralités Sur Les CapteursBenrabah IkhlasPas encore d'évaluation
- Chapitre 7: Mesure Des Tensions Et Des CourantsDocument5 pagesChapitre 7: Mesure Des Tensions Et Des CourantsMazama-Esso Moddoh OclooPas encore d'évaluation
- CoursPPT STS2 04 Conversion D'une Grandeur PhysiqueDocument18 pagesCoursPPT STS2 04 Conversion D'une Grandeur PhysiqueAmine EL FERHANIPas encore d'évaluation
- ABSDocument57 pagesABSEdidjo DarwinPas encore d'évaluation
- C83 CapteursDocument5 pagesC83 CapteursAmara NejiPas encore d'évaluation
- Correction Examen 2016Document2 pagesCorrection Examen 2016bouchrahebchiPas encore d'évaluation
- Note Technique Capteurs FRDocument16 pagesNote Technique Capteurs FRAek BenPas encore d'évaluation
- Symbole ÉlectroniqueDocument9 pagesSymbole ÉlectroniqueDavid50% (2)
- tp2 Capteur ModifDocument7 pagestp2 Capteur ModifZendagui MohamedPas encore d'évaluation
- Chapitre 1Document5 pagesChapitre 1mounaPas encore d'évaluation
- Chapitre 1Document5 pagesChapitre 1mounaPas encore d'évaluation
- Capteur Et Instrum Gim2Document69 pagesCapteur Et Instrum Gim2Guency Alven Rhocky KOMBILAPas encore d'évaluation
- Les Matériaux Intelligents Et Leurs ApplicationsDocument9 pagesLes Matériaux Intelligents Et Leurs ApplicationsFiras IsmailPas encore d'évaluation
- Moteur Et Systèmes de SoutienDocument52 pagesMoteur Et Systèmes de Soutienwhmidi7331100% (1)
- Les Systèmes Asservis 2018-19Document21 pagesLes Systèmes Asservis 2018-19nilsPas encore d'évaluation
- B - Sujet Epreuve Admissibilité CAPLP Interne Maint-Véhicules-2009Document45 pagesB - Sujet Epreuve Admissibilité CAPLP Interne Maint-Véhicules-2009Mou jpPas encore d'évaluation
- Sequentiel ExosDocument20 pagesSequentiel ExosChava TututiPas encore d'évaluation
- Les Capteurs en Instrumentation Industrielle - 6ème Édition: Sciences Et Techniques - Automatique. RobotiqueDocument1 pageLes Capteurs en Instrumentation Industrielle - 6ème Édition: Sciences Et Techniques - Automatique. RobotiqueKamel BourasPas encore d'évaluation
- Compte Rendu 3 Etude D'un Capteur de ForceDocument10 pagesCompte Rendu 3 Etude D'un Capteur de Forcezakariadz73Pas encore d'évaluation
- Chapitre 1:généralités Sur Les SignauxDocument10 pagesChapitre 1:généralités Sur Les Signauxsteph-leblanc100% (1)
- Autour de L'automobile: Identification, Mesure, Régulation Et ÉnergieDocument11 pagesAutour de L'automobile: Identification, Mesure, Régulation Et ÉnergieAhmed Adil AsraouiPas encore d'évaluation
- Cours de Systèmes Experts Et Temps Réel - 2020-2021Document104 pagesCours de Systèmes Experts Et Temps Réel - 2020-2021Bajikila AmandPas encore d'évaluation
- Polycopie TPDocument22 pagesPolycopie TPWalidAdrarPas encore d'évaluation
- Cahier Des TP Capteurs-GESI-1Document17 pagesCahier Des TP Capteurs-GESI-1chaimae ouarsalPas encore d'évaluation
- CHP III-Conditionnement Des CapteursDocument20 pagesCHP III-Conditionnement Des CapteursEliaç EphaPas encore d'évaluation
- PRATIQUE1 Commande Par Retour d'ETATDocument7 pagesPRATIQUE1 Commande Par Retour d'ETATSILA LENA EmmanuelPas encore d'évaluation
- 25 1 PDFDocument12 pages25 1 PDFsaidPas encore d'évaluation
- Defaut 191-31-32 - AlphaDocument71 pagesDefaut 191-31-32 - Alphafaf31aPas encore d'évaluation
- 117473800Document7 pages1174738002ste3Pas encore d'évaluation
- PohwaroDocument11 pagesPohwaroanthonyPas encore d'évaluation
- Dev c3Document2 pagesDev c3Rabia ZaiedPas encore d'évaluation
- Structure D'Un Systeme Automatise: CH Ii - Structure Materielle Des Systemes AutomatisesDocument4 pagesStructure D'Un Systeme Automatise: CH Ii - Structure Materielle Des Systemes AutomatisesWil ToulousePas encore d'évaluation
- LM335 Datasheet Francais - CompressedDocument17 pagesLM335 Datasheet Francais - CompressedNelyanashPas encore d'évaluation
- Chaine d' I Et d' E Mabot + Correction de Éléments TechniquesDocument2 pagesChaine d' I Et d' E Mabot + Correction de Éléments TechniquesboullepierrejulesPas encore d'évaluation
- DNB 2022 Asie Proposition CorrectionDocument4 pagesDNB 2022 Asie Proposition CorrectionJust Sign UpsPas encore d'évaluation
- Chp4 AutomatismeDocument15 pagesChp4 AutomatismeAbdl Karim Ben AchourPas encore d'évaluation
- Cours Capteurs PDFDocument113 pagesCours Capteurs PDFBouazza ZiouPas encore d'évaluation
- Ress.130369Document18 pagesRess.130369JANDOULI AbdelilahPas encore d'évaluation
- Mini ProjetDocument3 pagesMini ProjetFakhreddine Okail67% (3)
- Chapitre 1 Les CapteursDocument14 pagesChapitre 1 Les CapteursAyou HamPas encore d'évaluation
- Wa0000.Document44 pagesWa0000.hadjer djerouPas encore d'évaluation
- Poly CopieDocument76 pagesPoly CopieSAADIPas encore d'évaluation