Académique Documents
Professionnel Documents
Culture Documents
Système D'embouteillage PDF
Système D'embouteillage PDF
Transféré par
marodionTitre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Système D'embouteillage PDF
Système D'embouteillage PDF
Transféré par
marodionDroits d'auteur :
Formats disponibles
IEPSCF Uccle
Projet de Fin dEtudes
Conception et ralisation dun systme
automatique pour embouteillage de liquides
Date cration 12.02.2013 Date rvision 24.11.2013
Prnom, Nom Signature Date
Auteur Mario Dionisio
Encadr par Said Dhimdi
Bachelier en lectromcanique anne III 2012 - 2013
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 2 of 65 Mario Dionisio
Rsum
L'objet de ce travail est le dveloppement d'un exemple assez complet de lapplication des notions de
mcanique, pneumatique, lectrotechnique, automation et lectronique acquises durant les 3 annes de cours
de bachelier en lectromcanique.
Dautres connaissances faisant partie du bagage culturel et le know-how acquis pendant les prcdentes
expriences de travail ont contribu significativement la ralisation de ce projet.
Cette relation technique dcrit les dtails des phases du travail et est divise en deux sections principales : la
conception des mcanismes et la ralisation pratique du systme.
Dans la premire section Conception , aprs avoir fait des considrations gnrales pour la ralisation
dun projet, au chapitre 2 sont spcifis quels sont les objectifs du travail.
Le chapitre 3 donne une description des machines pour lembouteillage existantes et les diffrentes phases de
la production.
Le chapitre 4 dcrit quelles sont les fonctionnalits globales et de chacun des systmes attendues. Il donne un
aperu de la structure et des composants des mcanismes en question. Dans une machine intelligente , de
nombreuses fonctions sont commandes par un systme bas sur les sciences de l'information, de
l'automatisation et de l'lectronique. Il value galement tous les composants mcaniques, pneumatiques et
lectroniques de lquipement.
Le produit final de ce projet est une machine et pour cela une rfrence normative doit tre respecte. Cela
est fait au chapitre 5 o sont dcrits les aspects principaux de la directive Machine 2006/42/CE.
Le chapitre 6 analyse les aspects de planification et danalyse des risques. L organisation du travail est une
phase trs importante qui donne lempreinte au droulement des travaux pour la ralisation dun projet : la
planification temporelle, le budget, lanalyse des risques, le matriel, la documentation, lassemblage, etc. ne
sont que les plus importants.
Dans la deuxime section Ralisation , aprs avoir donn des considrations gnrales au chapitre 1, dans
les chapitres 2, 3, 4 et 5, sont dcrites en dtail les phases de la ralisation pour chaque sous-systme :
mcanique, pneumatique, lectrique et automation.
Le chapitre 6 est consacr au processus de test et de la mise en service de la machine dembouteillage et
vrification que toute la procdure se droule de manire optimale.
Enfin, aux chapitres 7 et 8, sont tires les conclusions financires, techniques et gnrales.
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 3 of 65 Mario Dionisio
Remerciements
A mon pouse, Alexandra, qui ma encourag suivre les tudes en sachant quelle aurait d renoncer pour
trois ans ma prsence prs delle et une partie de mon support pour lever les enfants.
A mes enfants, Giulia, Gloria et Lucio qui ont d se priver dune partie du temps qui leur est normalement
lgitimement ddi.
Je tiens remercier tous les professeurs du cours de bachelier en Electromcanique qui mont transmis leurs
prcieuses connaissances durant ces trois annes de cours.
Jexprimer ma gratitude et mon respect M. Said Dhimdi pour avoir dirig ce Travail de Fin dEtudes avec
intrt et esprit de support. Merci beaucoup pour votre patience, votre disponibilit et pour toute lexprience
et les comptences que vous mavez transmises toujours avec gentillesse et bonne humeur, tout au long de
mon travail. Merci pour votre implication dans mon travail et pour toutes vos remarques toujours pertinentes
qui mont permis davancer et darriver ce rsultat.
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 4 of 65 Mario Dionisio
Sommaire
RSUM ...................................................................................................................................................................... 2
SOMMAIRE ................................................................................................................................................................ 4
PRSENTATION ........................................................................................................................................................ 6
I. CONCEPTION ...................................................................................................................................................... 7
I.1 CONSIDRATIONS GNRALES .................................................................................................................... 8
I.2 OBJECTIFS DU PROJET .................................................................................................................................... 9
I.3 DESCRIPTION GNRALE DUN SYSTME DEMBOUTEILLAGE ..................................................... 10
I.4 EXIGENCES DU SYSTME DEMBOUTEILLAGE RALISER ........................................................... 12
I.4.1 Description de la production ....................................................................................................................... 12
I.4.2 Description du fonctionnement operatif ..................................................................................................... 15
I.4.3 Description du fonctionnement technique .................................................................................................. 15
I.5 DIRECTIVE ET NORMES DE RFRENCE ................................................................................................ 17
I.5.1 La directive machines 2006/42/CE ....................................................................................................... 17
I.5.2 Application des normes pour le projet ........................................................................................................ 19
I.6 ORGANISATION DU TRAVAIL ET SCURIT .......................................................................................... 21
I.6.1 Gantt chart .................................................................................................................................................. 22
I.6.2 Budget ......................................................................................................................................................... 24
I.7 ANALYSE ET GESTION DES RISQUES ........................................................................................................ 25
II. REALISATION ................................................................................................................................................... 27
II.1 CONSIDRATIONS GNRALES ................................................................................................................ 28
II.2 RALISATION MCANIQUE ........................................................................................................................ 28
II.2.1 Considrations gnrales ........................................................................................................................... 28
II.2.2 Plateau tournant ......................................................................................................................................... 28
II.2.3 Calculs a la rsistance et vrification en flexion........................................................................................ 29
II.2.4 Conception des mcanismes ...................................................................................................................... 40
II.3 RALISATION PNEUMATIQUE ................................................................................................................... 42
II.3.1 Considrations gnrales ........................................................................................................................... 42
II.3.2 Les vrins .................................................................................................................................................. 43
II.3.3 Pompe de remplissage ............................................................................................................................... 43
II.4 RALISATION LECTRIQUE ....................................................................................................................... 45
II.4.1 Considrations gnrales et de scurit .................................................................................................... 45
II.4.3 Unit de capsulage ..................................................................................................................................... 50
II.5 RALISATION DE LA PARTIE AUTOMATION ........................................................................................ 52
II.5.1 Considrations gnrales ........................................................................................................................... 52
II.5.2 Grafcet ....................................................................................................................................................... 53
II.5.3 Dispositifs dentre (capteurs) et de sortie (actionneurs) ........................................................................ 57
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 5 of 65 Mario Dionisio
II.6 PROGRAMMATION ET TEST ....................................................................................................................... 60
II.7 RELATION ET SOLDE FINAUX.................................................................................................................... 61
II.8 CONCLUSIONS ................................................................................................................................................. 63
II.9 PHOTOS DE LA RALISATION .................................................................................................................... 64
BIBLIOGRAPHIE .................................................................................................................................................... 65
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 6 of 65 Mario Dionisio
Prsentation
Un systme dembouteillage est une installation de production typique obtenue partir de l'intgration de
nombreuses machines automatiques: machines de rinage, remplissage, bouchage, capsulage, etc. ainsi que
par une srie de transports en mesure de grer le flux des produits entre une machine et la suivante.
La conception et l'ingnierie d'une ligne de production industrielle moderne est un processus compos de
plusieurs tapes, ralises en squence et caractrises par le travail de diffrents professionnels qui
contribuent chacun la ralisation d'une tape et tous la ralisation du projet dans son ensemble. Le
contrle du procd doit rpondre, outre la coordination normale des oprations effectuer, aussi
plusieurs autres fonctionnalits comme la gestion des alarmes, des situations d'erreur, les planifications, etc.
Le contrle de ce type de processus doit tre considr comme une tche complexe, plutt que difficile. Un
problme difficile est un problme qui nadmet gnralement qu'une seule solution, bien que
mathmatiquement ou scientifiquement difficile dtecter, alors quun problme complexe est un problme
difficile manipuler, plus difficile d'un point de vue pratique. De mme, un processus est caractris par
plusieurs contraintes, par des interdpendances entre les phases concernes, par des objectifs qui peuvent
s'exclure mutuellement, etc. et admet plusieurs possibles solutions.
La mthode qui mne la solution d'un problme complexe est gnralement la dcomposition rcursive
modulaire des problmes aux niveaux infrieurs qui sont solubles plus facilement.
Dans le pass, la fonction principale du logiciel de commande des machines industrielles tait limite au
rythme des oprations effectuer sur la base de modles prdfinis. Les systmes modernes de contrle des
machines industrielles, en s'appuyant sur la puissance de calcul et d'espace mmoire, sur des logiciels toujours
plus puissants et travers la rtroaction sensorielle, peuvent fournir les multiples fonctionnalits requises par
un systme moderne assez complexe. En dfinitive, ils deviennent des systmes de traitement de donnes
dans lesquels il y a une supervision locale complte offrant les meilleures performances, la scurit, une plus
grande autonomie fonctionnelle et la gnration de grandes quantits d'informations sur les processus
superviss.
Pour ce travail de fin dtude, jai voulu condenser une ligne de production industrielle en un systme rduit en
dimensions pour plusieurs raisons : cest une maquette de projet de fin dtudes, pour le transport et pour la
prsentation dun prototype.
Dans cette tude, les parties principales des phases qui composent une ligne dembouteillage seront
reprsentes : remplissage, bouchage, capsulage et tiquetage. Le rinage et lemballage ne sont pas inclus
dans le travail.
Avant dentrer dans le dveloppement de chaque phase, de la conception la ralisation du systme, une
description gnrale dun systme dembouteillage est donne.
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 7 of 65 Mario Dionisio
I. CONCEPTION
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 8 of 65 Mario Dionisio
I.1 Considrations gnrales
La philosophie suivre dans la ralisation dun projet, dans ce cas une machine, se concrtise dans les phases
suivantes :
1. Comprendre dans le dtail ce que le client sattend de la ralisation et bien le transcrire dans le cahier
des charges.
2. Faire une valuation globale technique, financire, de ressources humaines, des moyens techniques,
de disponibilit de temps, etc. pour vrifier la faisabilit du projet.
3. Si la phase 2 nest pas satisfaite, le projet ne peut pas tre et il est bien quil ne soit pas initi ou il doit
tre rvis et modifi avant de pouvoir le relancer. Au contraire, si les requis sont tous satisfaits, on
peut procder une dfinition et planification dtaille du projet.
4. La conception doit tenir compte et doit satisfaire simultanment :
a. Les requis techniques ;
b. Les normes en vigueur qui rglent le champ dapplication du projet.
A rien servirait davoir un trs bon projet sans que les normes aient t respectes.
5. Successivement, la ralisation peut avoir lieu dans le respect des spcifications techniques dtailles
du projet.
6. Une fois complte la ralisation de la machine, la mise en service peut tre garantie seulement quand
les tests ont tous eu un rsultat positif. Cette phase est accompagne de la remise du certificat de mise
en service et de la documentation qui peut inclure un plan de maintenance.
7. Dans toutes les phases du projet, laspect scurit doit toujours tre tenu en compte.
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 9 of 65 Mario Dionisio
I.2 Objectifs du projet
a. Objectif technique :
Lobjectif du point de vue technique du projet est de dmontrer la faisabilit dun poste dembouteillage de
liquides de petite taille, en version compacte et portable. Les postes dembouteillages automatiques sont pour
la plupart des machines assez encombrantes utilises par la moyenne et grande production. Lide den
construire une de dimensions rduites est innovante soit parce que tels dispositifs ne se trouvent pas en
commerce aujourdhui, soit pour des applications pratiques qui peuvent tre envisages et reportes ci-
dessous.
b. Objectif commercial :
Un possible secteur de march pour un tel dispositif est le petit utilisateur/producteur ou pour lutilisation
familiale. Lembouteillage de liquides (huile, vin, jus de fruit, etc.) ne reprsente pas un besoin primaire.
Toutefois, dans les cas o il y a besoin dune conservation plus longue de produits, pour le transport, pour la
commercialisation, etc., lembouteillage devient indispensable. Pour valuer le potentiel de commercialisation
du produit, une analyse de march plus approfondie serait ncessaire.
c. Objectif didactique :
Le poste dembouteillage peut tre un support didactique pour les cours des coles secondaires, des coles
techniques ou pour des cours spcifiques. Le systme est facilement dmontable et transportable, ce qui
facilite le dplacement pour la dmonstration dans plusieurs coles.
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 10 of 65 Mario Dionisio
I.3 Description gnrale dun systme dembouteillage
L'volution du march exige de plus en plus la production de lignes d'embouteillage compltes installes selon
les besoins spcifiques du client. Dans l'entreprise, le personnel du dpartement d'ingnierie ralise le lay-out
des lignes et suit toutes les tapes de la ralisation du projet jusquaux tests sur site.
Fig. I.3.1 Ligne dembouteillage
L'automatisation et la traabilit complte du produit sont les lments cl de la phase de conception. La ligne
de production est compose de plusieurs zones relies en squence. Chacune des tapes ralise une fonction
bien prcise et prpare la bouteille ltape successive. Les capteurs qui dtectent ltat des phases activent ou
dsactivent les tapes selon les besoins. Du tableau de commande, il est possible commander le dmarrage et
larrt de la production. Des systmes de contrle de scurit garantissent le droulement correct et
interviennent soit dans les cas darrt de la production, soit quand il y a le risques de danger pour loprateur.
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 11 of 65 Mario Dionisio
Fig. I.3.2 Schma des tapes dune ligne dembouteillage
Dans la zone 1 est plac le dispositif de rinage qui permet de nettoyer l'intrieur de la bouteille avec un jet
d'eau. La bouteille est ensuite sche par un soufflage d'air qui enlve les gouttes d'eau restes l'intrieur. La
zone 2 est le remplissage qui a la tche de remplir la bouteille avec la boisson. La zone 3 gre le bouchage qui
peut tre ralis avec diffrents types de fermeture: lige, bouchon vis, en plastique ou en aluminium. La
zone 4 est le capsulage o les diffrents types de bouchon peuvent tre recouverts de la capsule o il est
souvent imprim la marque. Le passage d'une zone l'autre est contrl par des capteurs qui contrlent le flux
des bouteilles. La phase 5 regarde ltiquetage o une ou plus tiquettes sont appliques sur la bouteille. Autres
phases peuvent suivre ensuite comme lemballage.
Sur la base de la demande du client et pour des questions despace, les dispositifs des phases dcrites ci-dessus
sont intgrs en un monobloc , une seule machine fonctionnant exactement comme les modules du systme
et qui forment une structure compacte unique et synchronise. Une utilisation facile et la mise en place rapide
sont d'autres qualits importantes de ces machines.
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 12 of 65 Mario Dionisio
Fig. I.3.3 Systme dembouteillage monobloc
I.4 Exigences du systme dembouteillage raliser
I.4.1 DESCRIPTION DE LA PRODUCTION
Lalimentation du systme pour la production consiste de :
- Bouteilles de 750 cl ;
- Boisson de remplissage ;
- Bouchons en lige ;
- Capsules thermo-rtractables ;
- Etiquettes adhsives .
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 13 of 65 Mario Dionisio
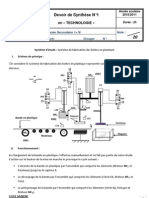
Fig. I.4.1 Schma de principe du systme dembouteillage
Quatre phases opratives distinctes et trois tapes stables sont concernes pour la production dune bouteille
(remplissage, bouchage, tiquetage et capsulage). La phase dtiquetage se droule avec le plateau en rotation
entre les phases de bouchage et capsulage.
Les phases se droulent squentiellement sur une mme bouteille et simultanment sur quatre bouteilles
diffrentes. A un instant t, quand une bouteille se trouve dans la premire phase de remplissage, une deuxime
est bouche et une troisime est capsule. La ligne de production est compose dun systme principal de
chargement et davancement des bouteilles plateau tournant. Dautres mcanismes auxiliaires prparent
lalimentation des bouchons et des capsules. Le liquide arrive dans les bouteilles par une dpression cre
son intrieur par une pompe. Les phases se droulent de la manire de suite dcrites.
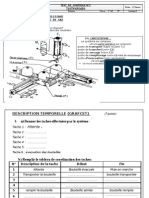
- Phase 1 : Remplissage
o Avec la dtection de la prsence bouteille, un vrin descend la tte de remplissage et le liquide
commence remplir la bouteille ;
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 14 of 65 Mario Dionisio
o Le niveau de remplissage du liquide atteint est dtect par un capteur de proximit capacitif ce
qui entrane larrt de la pompe et consquemment de lalimentation du liquide ;
o Le vrin remonte la tte de remplissage ;
o Le plateau tournant avance de 1/3 de tour jusqu ltape successive.
- Phase 2 : Bouchage
o Avec la prsence de la bouteille et dun lige, le vrin de bouchage descend et enfonce le lige
dans la bouteille ;
o Le vrin remonte ;
o Un mcanisme avec une charge de lige garanti la prsence dun lige en succession pour les
bouteilles ;
o La table rotative avance de 1/3 de tour.
- Phase 3 : Etiquetage
o La bouteille passe devant un tambour, le temps que ce dernier lui applique ltiquette ;
- Phase 4 : Capsulage
o En avanant, la bouteille fait descendre une capsule sur son col mme ;
o La bouteille sarrte sous le vrin de capsulage :
o Le vrin descend la rsistance lectrique autour de la capsule ;
o La rsistance lectrique est alimente pour un temps t ncessaire pour rtrcir la capsule ;
o Le temps t coul, lalimentation de la rsistance est coupe, le vrin remonte et la table
rotative avance de 1/3 de tour.
La bouteille remplie, bouche, capsule et tiquete est achemine la sortie.
La rotation du plateau tournant se produit seulement quand les phases dans les trois tapes sont termines et
que les vrins sont rentrs. En considrant que la somme des temps employs dans les phases 2 et 3 est
infrieure ou gale la phase 1 de remplissage, il en rsulte que ce sera la phase 1 qui commande la rotation du
plateau tournant.
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 15 of 65 Mario Dionisio
I.4.2 DESCRIPTION DU FONCTIONNEMENT OPERATIF
4.2.1 Fonctionnement normal
La mise en marche et larrt sont commands par un bouton-poussoir marche-arrt . En conditions
normales, quand toutes les conditions de lautomatisme sont satisfaites, le systme fonctionne en cycle
continu. La table tourne dun angle et prpare ltape successive seulement quand les trois oprations
conduites en parallle sont acheves correctement. Les phases qui se concluent avant restent en attente de
lachvement de la phase de plus longue dure (phase 1). Dans le cas o il est dtect labsence de
bouteille/bouchon/capsule, le systme sarrte et attend. Une fois rtablies les conditions opratives, le
systme se remet en marche ds la phase interrompue.
A la commande darrt de la production par loprateur, le systme ne sarrte pas instantanment. Les
oprations en cours dans les quatre phases se compltent jusquau capsulage de la dernire bouteille et puis le
systme sarrte. De cette manire le systme est prt pour un nouveau cycle.
4.2.2 Fonctionnement en mergence
Le bouton-poussoir arrt durgence actionn linstant t provoque larrt immdiat de tous les composants
du systme et laisse les actionneurs dans ltat o ils se trouvent ce mme instant. Ceci permet de ne pas
provoquer dendommagements ultrieurs dans une situation quelconque durgence.
4.2.3 Fonctionnement aprs un arrt durgence
Larrt durgence est dbloqu travers un boutonpoussoir cl, puis le systme est rinitialis avec le
bouton-poussoir Reset avant de reprendre le cycle normal de travail : le plateau tournant est repositionn
et les vrins sont rtracts.
I.4.3 DESCRIPTION DU FONCTIONNEMENT TECHNIQUE
4.3.1 Partie mcanique
En observant le schma, on dduit que le systme est compact pour la typologie de ligne de production
propose plateau tournant avec entre et sortie des bouteilles adjacentes dun mme ct.
Sagissant dun systme pour le secteur alimentaire, les parties en contact immdiat avec les composants de la
production sont en acier inoxydable ou en aluminium.
Dautres mcanismes auxiliaires tels que :
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 16 of 65 Mario Dionisio
- Un systme dintroduction des bouteilles sur la table ;
- Un systme daccueil des bouteilles ;
- Un systme davancement et de positionnement des liges et des capsules ;
seront ventuellement drivs des mouvements principaux si leur complexit ne djoue pas lavantage de ne
pas installer de nouveaux gnrateurs de mouvements (petits moteurs, lectroaimants, etc.).
4.3.2 Partie pneumatique
Les vrins sont actionns par nergie pneumatique 8 Bar provenant de lextrieur.
Une pompe part est utilise pour aspirer lair dans la bouteille pour lalimentation du liquide.
4.3.3 Partie lectrique
Le systme comprendra un moteur pour la rotation du plateau qui pourra tre du type pas pas ou, pour le
niveau de prcision du mouvement, asynchrone. Pour lvolution des phases, plusieurs capteurs seront
utiliss :
- Dtecteur de position du plateau ;
- Fin de course pour tous les vrins ;
- Dtecteur de proximit capacitif pour le liquide ;
- Dtecteurs de prsence bouteille/capsule/tiquette.
La temporisation pour lactivation de la rsistance lectrique sur la capsule thermo-rtractable et le comptage
du nombre de bouteilles produites sont effectus par programmation.
4.3.4 Partie automation
Le systme est gr par un automate Siemens S7 programm travers lapplication de dveloppement
industriel Totally Integrated Automation Portal (TIA Portal) . Lintervention humaine est seulement en
entre et sortie, i.e. pour lalimentation du systme en entre avec les bouteilles, les bouchons, les capsules et
les tiquettes et pour prlever en sortie les bouteilles pleines, bouches, capsules et tiquetes. En
fonctionnement normal, aucune autre intervention humaine intermdiaire est prvue.
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 17 of 65 Mario Dionisio
I.5 Directive et normes de rfrence
Avec les requis techniques dfinis, ltape successive pour la conception et la ralisation d'une machine est la
rfrence une directive et des normes pour les multiples aspects fonctionnels et de scurit quil faut tenir
en compte. Le but est de produire un bien qui est commercialisable et qui offre les garanties de scurit pour
son installation, utilisation et maintenance.
La directive de rfrence est la directive Machine 2006/42/CE et normes drivantes en vigueur, sagissant
dune machine comme dfini dans la directive mme : Ensemble de pices ou d'organes lis entre eux, dont au
moins un est mobile et, le cas chant, d'actionneurs, de circuits de commande et de puissance, etc. runis de
faon solidaire en vue d'une application dfinie, notamment pour la transformation, le traitement, le
dplacement et le conditionnement d'un matriau.
Le travail de fin dtudes doit traiter tous les aspects lis la conception et ralisation dune machine. La partie
normative est donc tenue en compte dans cette relation technique mme si la ralisation finale est une
maquette.
I.5.1 LA DIRECTIVE MACHINES 2006/42/CE
La directive Machine 2006/42/CE vise assurer la libre circulation des machines et leurs accessoires tout
en fixant des exigences essentielles pour la sant et la scurit des travailleurs et des consommateurs :
http://eur-lex.europa.eu/JOHtml.do?uri=OJ:C:2012:061:SOM:EN:HTML
Cette directive est traduite dans les termes techniques par un ensemble de normes europennes harmonises
(EN ). Le respect de ces normes implique que la directive machine est respecte. Ces normes europennes
offrent des solutions de conformit et de la prsomption de conformit aux exigences essentielles de scurit et
de sant. L'utilisation des normes harmonises reste volontaire et les fabricants peuvent choisir de suivre ou
non une norme harmonise pour fabriquer leurs produits. Les fabricants peuvent utiliser d'autres solutions
techniques garantissant un niveau de scurit quivalent. Dans ce cas, ils doivent tre en mesure de prouver
que leurs produits sont conformes aux exigences essentielles de scurit obligatoire et en tenant compte de
l'tat de l'art.
La directive 2006/42/CE se fonde sur la directive 98/37/CE qui a codifi la directive Machines
89/392/CEE modifie. La directive Machines sapplique aux machines qui sont mises sur le march de
lUE. Elle ne sapplique pas aux produits fabriqus dans lUE en vue de leur mise sur le march ou mise en
service dans des pays situs en dehors de lUE, bien que certains de ces pays puissent avoir une rglementation
nationale base sur la directive Machines ou puissent accepter sur leur march des machines conformes la
directive.
De la pratique de la nouvelle Directive Machines 2006/42/CE mergent 3 ides fortes pour la conception des
machines et les fonctions de scurit :
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 18 of 65 Mario Dionisio
L'analyse des risques pralable la conception ;
Une attention particulire l'aspect quantitatif des fonctions de scurit, qui s'ajoute l'approche
qualitative ;
L'utilisation des niveaux de performance (PL : Performance Level).
Pour le systme dembouteillage, les aspects de la directive tenus en compte sont les suivants:
a. Matriaux et objets destins entrer en contact avec les denres alimentaires (rglement (CE) no
1935/2004). Les machines concernes sont, par exemple, les machines utilises pour fabriquer,
prparer, cuire, transformer, refroidir, manutentionner, stocker, transporter, conditionner, emballer et
distribuer des denres alimentaires, des produits cosmtiques ou des produits pharmaceutiques).
b. La rduction des risques dus aux artes vives, aux angles vifs et aux surfaces rugueuses (la norme EN
ISO 12100-2 - Scurit des machines Notions fondamentales, principes gnraux de conception
Partie 2: Principes techniques)
c. Le systme pneumatique (la norme EN 983 Scurit des machines -Prescriptions de scurit
relatives aux systmes et leurs composants de transmissions hydrauliques et pneumatiques
Pneumatique).
d. Les spcifications gnrales concernant la conception de lquipement lectrique des machines (la
norme europenne CEI-IEC 60204-1 - Scurit des machines quipement lectrique des
machines Partie 1: rgles gnrales. applicable la ralisation de l'quipement et des systmes
lectriques et lectroniques des machines, y compris un groupe de machines fonctionnant ensemble
d'une manire coordonne, mais excluant les aspects de niveau plus lev des systmes (par exemple,
les communications entre systmes). Le respect de cette norme assure la scurit du personnel et des
biens, la cohrence de rponse des commandes, la facilit de la maintenance.
e. La scurit fonctionnelle est la partie du systme de scurit gnral qui dpend du fonctionnement
correct des processus ou quipements en rponse ses entres. La norme ISO 13849-1:2006 (publie
par le CEN) fournit des exigences de scurit et des conseils sur les principes pour la conception et
l'intgration des parties lies la scurit des systmes de commande (PLS/SC), y compris la
conception de logiciels. Pour ces parties du PLS/SC, elle spcifie les caractristiques qui incluent le
Apprciation des
risques
Prvention des
risques
Conception du systme relatif
la scurit
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 19 of 65 Mario Dionisio
niveau de performance requis pour la ralisation de fonctions de scurit. Elle s'applique aux PLS/SC,
quel que soit le type de technologie et d'nergie (lectrique, hydraulique, pneumatique, mcanique,
etc), pour toutes sortes de machines. Elle ne prcise pas les fonctions de scurit ou des niveaux de
performance qui doivent tre utiliss dans un cas particulier. La norme EN 62061 (publie par le
CENELEC) traite aussi la scurit fonctionnelle des systmes de contrle de la machine, mais utilise
des termes et techniques lgrement diffrents.
I.5.2 APPLICATION DES NORMES POUR LE PROJET
Il est donc vident que la scurit des machines doit tre acheve ds la conception. A partir dune analyse des
risques et en rfrences aux normes concernes, les contraintes auxquelles le systme doit se conformer sont
dfinies.
a. Le systme doit tre ralis avec des composants en acier inox et aluminium.
b. Les structures mtalliques obtenues par adaptations de partie de systmes dautres machines, ne
doivent pas prsenter des bords avec angles vifs qui pourraient provoquer des blessures. Dans le cas
o les traitements ne permettent pas de rejoindre le niveau de scurit, on peut recourir lapplication
dautres matriaux de protection.
c. La connexion des tuyauteries doit garantir une fixation adquate pour viter tout dclenchement
imprvu.
d. La scurit de linstallation lectrique joue un rle important dans la conception et ralisation du
projet. Les aspects concernant le cblage, la section et lidentification des conducteurs, la mise la
terre, le disjoncteur diffrentiel et magntothermique sont dment pris en compte. Une attention
particulire est attribue larrt durgence.
Larrt durgence est une fonction destine :
parer des risques en train d'apparatre ou existants pouvant porter atteinte des personnes
(risques prenant naissance l'occasion d'anomalies),
tre dclenche par une action humaine.
La norme EN 60204-1 dfinit trois catgories darrt durgence :
Catgorie 0 : suppression immdiate de la puissance (arrt non contrl) ; l'arrt de catgorie 0
est prioritaire sur les arrts de catgories 1 ou 2.
Catgorie 1 : arrt contrl en maintenant la puissance sur les actionneurs jusqu larrt, suivi
de la coupure de la puissance ;
Catgorie 2 : arrt contrl avec maintien de la puissance sur les actionneurs. Un arrt normal
en cours de production est considr comme un arrt de catgorie 2.
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 20 of 65 Mario Dionisio
Les exigences de scurit :
la fonction d'arrt d'urgence doit tre disponible et mme de fonctionner tout instant (logique
cble
1
) ;
l'arrt d'urgence doit fonctionner suivant le principe de l'action positive (dfini dans la norme
EN/ISO 12100) ;
l'arrt d'urgence peut tre de catgorie 0 ou catgorie 1, selon ce qui a t dtermin par
lvaluation des risques.
Pour ce qui concerne le projet, le choix de larrt durgence est fait sur la base de lanalyse des risques. Les
lments qui peuvent donner origine des risques sont les vrins, notamment le vrin de capsulage plus
particulirement. Tout en tenant compte que la machine travaille automatiquement, on peut considrer le cas
o une personne sapproche de la machine et est expose au risque de compression de la main/doigts sous le
vrin. Ce risque peut tre rduit sinon annul en installant une protection en plexiglas (transparente pour
pouvoir contrler visiblement les phases de la machine) qui empche lintroduction dune main ou dun objet
quelconque sous les vrins. Un autre lment de la scurit, mme si plus fonctionnelle que personnelle, est la
rotation du plateau tournant. Si pour une raison quelconque le plateau tournant est bloqu quand le moteur
est aliment, il faut prvoir un arrt durgence pour arrter le mouvement. Pour lanalyse des risques
considre, le bouton-poussoir darrt durgence doit tre de catgorie 0 , cest--dire que lalimentation est
coupe ds que le bouton-poussoir est activ. Un arrt durgence de catgorie 0 et 1 peut tre soit cbl (norme
CEI-IEC 60204-1), soit implment par un automate de scurit (EN ISO 13850). Vu que lautomate
disponible nest pas de scurit, larrt durgence a t ralis cbl. Une fois arrt le systme, il faut dceler
lorigine de lalarme, lliminer et seulement aprs, le bouton-poussoir darrt durgence peut tre dbloqu. Le
dblocage du bouton-poussoir est mcanique. Le systme ayant t interrompu dans lvolution du
programme de lautomate, il faut rinitialiser le systme pour le reporter en condition de fonctionnement
normal. Un nouveau cycle peut alors redmarrer.
1
Jusqu' rcemment, il fallait utiliser des composants lectromcaniques cbls pour les circuits d'arrt
d'urgence. Des modifications rcentes des normes, comme les normes CEI 60204-1 et NFPA 79, permettent des
automates de scurit et autres types de dispositifs lectroniques conformes aux exigences des normes comme
la norme CEI 61508 d'tre utiliss dans le circuit d'arrt d'urgence.
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 21 of 65 Mario Dionisio
I.6 Organisation du travail et scurit
Lorganisation du travail est une phase trs importante o la planification temporelle, budgtaire et de la
gestion des risques sont analyss, dvelopps et dfinis.
Le Gantt chart spcifie les dtails des tches, les livrables et les tapes importantes (milestones). Le WBS
Work Breakdown Structure , dcompose lensemble complexe des phases du projet en des tches
lmentaires plus faciles grer; la sommation des tches lmentaires donne la fin le projet complexe
originel.
Dans chaque projet, le cot prvu pour chaque lment composant est list et ceux-ci, par sommation,
donneront le budget. Dans ce projet, le budget a t dress normalement pour les matriaux, la conception et
la main duvre pour avoir une ide effective du cot total du projet. Dans la ralit, certaines dpenses ne
seront pas ligibles, soit pour des matriaux dj disponibles, soit pour la main duvre.
Finalement, sagissant de travaux avec plusieurs aspects de scurit tenir en compte, le Risk management
ou lanalyse des risques, leur valuation, classification et contremesures associes ont t dveloppes.
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 22 of 65 Mario Dionisio
I.6.1 GANTT CHART
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 23 of 65 Mario Dionisio
Fig. I.6.1 Gantt chart du projet
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 24 of 65 Mario Dionisio
I.6.2 BUDGET
Budget
n. Description
Cot
unitaire
(HTVA)
Unit Quantit
Cot Total
(HTVA)
I Prvision de dpense totale pour le projet 5.435
II Matriaux 3.743
1 Automate Siemens S7 250 n. 1 250
2 Expansion entres/sorties 215 n. 1 215
3 Relais 24V 25 n. 3 75
4 Borniers 2 n. 20 40
5 Voyants, lampes de signalisation 25 n. 1 25
6 Plateau tournant 1.950 n. 1 1.950
7 Pompe liquides 196 n. 1 196
8 Vrin 50 161 n. 1 161
9 Vrin 15 22 n. 2 44
10 Fin de course 17 n. 6 102
11 Electrovannes + bobines 24 V 35 n. 3 105
12 Connections, silencieux, tuyau 50 n. 1 50
13 Fin de course mcanique 10 n. 3 30
14 Bouton-poussoir arrt urgence 20 n. 1 20
15 Capteur capacitif 50 n. 1 50
16 Moteur lectrique 60 n. 1 60
17 Tableau lectrique 50 n. 1 50
18 Disjoncteur 16A 12 n. 1 12
19 Disjoncteur 10A 10 n. 1 10
20 Diffrentiel 30mA 40 A 60 n. 1 60
21 Contacteur 40 n. 1 40
22 Cbles, conducteurs 50 n. 1 50
23 Conteneur Acier Inox 50 n. 1 50
24 Pieds support acier peint blanc 6 n. 6 36
25 Profil en acier L 5 m. 3 15
26 Plaques acier de support 40 n. 1 40
27 Profil en aluminium U 7 m. 1 7
III Conception et main d'oeuvre 1.692
1 Bureau d'tudes 23 h. 36 828
2 Technicien installateur 12 h. 72 864
Fig. I.6.1 Prvision de dpense pour le projet
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 25 of 65 Mario Dionisio
I.7 Analyse et gestion des risques
Un projet bien organis et gr ne peut ignorer une analyse et une stratgie de gestion des risques associs au
projet. Le processus de gestion des risques est volutif afin dassurer que le niveau, le type et la visibilit de la
gestion des risques soient proportionnels la fois avec le risque et l'importance du projet. En gnral, les
phases de lanalyse et la gestion des risques sont les suivantes :
1. Dfinir la mthodologie de gestion des risques utiliser ;
2. Identification des risques ;
3. Catgorisation des risques ;
4. Evaluation de l'impact des risques ;
5. La priorisation des risques ;
6. La planification des mesures prendre ;
7. Suivi des mesures contre les risques.
Lvaluation de limpact des risques reporte sur un tableau le risque total (r), rsultat de la probabilit (p) dun
vnement et les consquences (i) si effectivement lvnement savre :
Impacte
1 3 5 7 9
.1 0.1 0.3 0.5 0.7 0.9
.3 0.3 0.9 1.5 2.1 2.7
Probabilit .5 0.5 1.5 2.5 3.5 4.5
.7 0.7 2.1 3.5 4.9 6.3
.9 0.9 2.7 4.5 6.3 8.1
Vert = Risque bas
Jaune = Risque moyen
Rouge = Risque haut
Risque haut Un plan daction complet doit tre labor. Ces risques sont surveills
de prs.
Un plan d'intervention pour tout lment de risque moyen peut tre dress o il est
jug ncessaire. Cependant, en gnral, pas de plan d'intervention est requis pour les lments de
risque moyen. Les risques moyens sont surveills sur une base rgulire.
Aucune action n'est requise pour les lments faible risque.
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 26 of 65 Mario Dionisio
Dans le cas du projet du systme dembouteillage, les risques moyen et haut sont reports avec le
correspondant plan daction.
Caractristiques Bas Risque Risque Medium Haut Risque Plan daction
A. Cadre
1. Dans
limplmentation
du projet :
[ ] Pas (ou peu) de
personnalisation est
ncessaire
[ ] Personnalisation
modre ncessaire
[ X ] Personnalisation
lourde ncessaire
Analyse
systmatique de
plusieurs solutions
possibles
B. Planification
2. Le % de temps
disponible pour le
projet:
[ ] 75 - 100% [ ] 50 75 % [ X ] 25 50% Soustraction de
temps au repos
physiologique
pas dautre choix
3. La dure du
projet est
estime :
[ ] Moins de trois
mois
[ X ] Entre 3 mois et un
an
[ ] Plus de un an Coordination
approprie avec le
travail et les autres
cours
C. Technique
4. Le
matriel pour la
ralisation :
[ ] Peut tout se
trouver facilement
[ X] Partiellement
difficile trouver
[ ] Trs difficile
trouver
Anticiper la
recherche et
lacquisition des
matriaux
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 27 of 65 Mario Dionisio
II. REALISATION
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 28 of 65 Mario Dionisio
II.1 Considrations gnrales
La premire phase, trs importante, a t celle dorganiser le travail. La ralisation est effectue suivant le plan
de la charte de Gantt. Un travail mal organis ds le dbut est difficile rectifier le long de la ralisation et
peut conduire des rsultats peu satisfaisants ou mme des checs.
Jai d en premire instance rorganiser latelier o jallais raliser les travaux. Latelier tait partiellement
vid d des travaux qui staient rendus ncessaires. Jy ai ramen les outils dj emports qui taient
indispensables la ralisation du poste dembouteillage. Leur disposition na pas t casuelle, mais avec le
principe de faciliter lutilisation.
Lordre et la propret jouent un rle trs important dans un atelier. Il est connu que des situations de dsordre
et de salet augmentent, outre le risque derreurs dans la ralisation mme du projet, aussi les risques pour les
personnes et pour les biens (risques de blessures, chute de matriel, incendie, etc.). Tout le long de la
ralisation, le maintien de lordre et de la propret dans le local a t impratif.
II.2 Ralisation mcanique
II.2.1 CONSIDRATIONS GNRALES
La partie mcanique est compose des mcanismes rotatifs, de translation et de mouvement plan outre la
structure de support de tout le systme et des supports pour les installations lectriques et pneumatiques. Par
consquent, en comprenant la base dappui pour toutes les autres installations, elle est la premire partie
tre ralise.
Llment de base sur lequel se droulent les phases de lembouteillage et autour su quel sappuient tout le
reste du systme est le plateau tournant. Il est donc vident que ce sera la premire partie mcanique tre
ralise. Axialement au plateau tournant, se trouvera la structure de support fixe autour de laquelle circuleront
les bouteilles. Sur cette structure de support seront installs et connects les autres dispositifs lectriques et
pneumatiques.
II.2.2 PLATEAU TOURNANT
Il existe en commerce des units soit lectriques que pneumatiques de plateau tournant qui permettent une
ralisation simple et rapide. Toutefois pour des raisons de cot, cette solution na pas t adopte. Dautre
part, la ralisation pice par pice dun plateau tournant aurait pris du temps et un cot non ngligeable.
Il fallait trouver un moyen pour rduire soit le temps de ralisation que le cot. Cela me poussa trouver
parmi des systmes dj existant un mcanisme rotatif, lextraire, le modifier et ladapter aux besoins du
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 29 of 65 Mario Dionisio
projet. Jai pens en premier lieu une roue dune moto sur son axe de rotation. La roue aurait pu tre
dispose horizontalement en modifiant le support de laxe et en installant un plateau sur la roue. Il fallait
trouver une roue de dimensions appropries coupler avec une structure axiale dappui des bouteilles. Hors,
trouver un plateau circulaire de dimensions appropries poser sur la roue ntait pas facile ; en construire un
partir dune tle naurait t moins simple non plus. Ces modifications et adaptations auraient t assez
complexes, laborieuses et coteuses. Cette solution a t donc abandonne.
Solution adopte
Jai pens la partie mcanique dun lave-linge. De cette machine, il fallait extraire la cuve avec le tambour et
les adapter pour le poste dembouteillage. Il fallait disposer laxe de rotation horizontalement et analyser les
efforts en jeu sur les rayons du croisillon. Une fois que les calculs effectus ont donn des rsultats qui
garantissaient la rsistance mcanique, jai complt la ralisation en adaptant et assemblant le reste des
composants. Pour le plan de rotation, jai rutilis an ladaptant le fond de la cuve tandis que ses parois
coupes en deux ont donn le support latral rotatif intrieur et celui fixe extrieur. Jai identifi dans les trois
aubes redans du tambour, le support idal pour lavancement des bouteilles. Jai cr un demi-cercle sur
chacune des trois aubes redans permettant de maintenir la bouteille fixe dans les trois phases afin que les
oprations se droulent rgulirement. Une phase critique du travail a t celle de positionner les vrins avec
une position angulaire exacte de 120 entre eux. A la fin de la rotation du plateau tournant, les trois bouteilles
doivent se trouver exactement sous les actuateurs de remplissage, bouchage et capsulage.
Pour continuer la ralisation et lassemblage, il tait indispensable de crer un support pour la cuve et le
tambour du lave-linge devenus maintenant le plateau tournant. Jai soud une barre profil L pour former
un support de forme carre et jy ai install 4 pieds. Jai fix le plateau tournant sur le support.
Lavantage de cette solution a t soit la facilit dadaptation, soit le matriel en acier inox requis pour les
systmes dans le secteur alimentaire.
II.2.3 CALCULS A LA RESISTANCE ET VERIFICATION EN FLEXION
2.3.1 Considrations gnrales sur les efforts en jeu
Le vrin de bouchage transmet un effort travers la bouteille sur les rayons du croisillon du plateau tournant.
Comme on peut voir dans le schma de Fig. II.2.3.2a, le croisillon est form par 5 rayons et le bouchage a lieu
en des positions situes 120 sur le plateau tournant. Si le premier bouchage a lieu en correspondance du
premier rayon, il en rsulte que les deux autres tombent entre deux rayons du croisillon. Pour chacune de ces
deux positions, une barre de connexion en acier entre les rayons du croisillon a t installe pour crer le
support mcanique au bouchage. En considrant que leffort dans ces deux situations est distribu entre deux
rayons, ltude de la rsistance sera effectue pour la situation plus dfavorable, cest--dire quand le bouchage
tombe sur un rayon du croisillon. La force ncessaire pratique pour enfoncer le lige est denviron 500 N selon
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 30 of 65 Mario Dionisio
la composition du lige. Cette valeur a t obtenue exprimentalement en utilisant un levier de deuxime
classe et en faisant plusieurs essais.
Fig. II.2.3.1a Levier pour preuve de la force de bouchage
Une bouteille a t positionne, centre et bloque 10 cm du point dappui sous le levier et un poids a t
appliqu lextrmit du levier 50 cm du point dappui. Lessai a t rpt avec des poids croissants en
commenant avec 5 Kg de poids (utiliss en soulvement de poids) jusqu lenfoncement total du lige.
On a :
Et :
() ( )
( )
Le rsultat a t que le lige sest enfonc compltement quand un poids total de 14 Kg a t appliqu, cest--
dire pour une force de :
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 31 of 65 Mario Dionisio
En considrant que je disposais dun vrin de caractristiques suprieures et en mme temps, pour avoir un
marge de scurit dans les conditions dexercice normal, la force maximale nominale du vrin de F = 1178 N a
t prise en compte pour les calculs la rsistance et la flexion.
Fig. II.2.3.1b Tableau des forces dlivres par des vrins Festo
2.3.2 Etude la rsistance
Nomenclature
Force applique
Force rsistante
Effort tranchant
Moment dencastrement
Moment flchissant
Surface
Hauteur
e Epaisseur
Facteur de scurit
Le schma de Fig. II.2.3.2a reprsente la vue du haut et frontale du plateau tournant avec les forces en jeu.
En considrant la forme L entre le rayon et laxe de rotation, le rayon du plateau tournant peut tre considr
comme une poutre encastre.
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 32 of 65 Mario Dionisio
Fig. II.2.3.2a Efforts plateau tournant
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 33 of 65 Mario Dionisio
a. Effort tranchant :
b. Moment dencastrement :
Diagrammes des forces et des moments
a. Effort tranchant
Pour
Leffort tranchant :
b. Moment flchissant :
Pour
{
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 34 of 65 Mario Dionisio
Fig. II.2.3.2b Efforts tranchants et moments flchissant du plateau tournant
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 35 of 65 Mario Dionisio
2.3.3 Vrification au cisaillement
Nomenclature
Effort tranchant
Surface
Contrainte admissible au cisaillement du matriau
Rsistance pratique au glissement/cisaillement
Limite lastique au cisaillement
Limite lastique la traction
Facteur de scurit
Contrainte tangentielle
Hauteur
e Epaisseur
Pour vrifier que le rayon du croisillon rsiste la contrainte de cisaillement, il faut que soit vrifie
linquation :
Le tableau de Fig. II.2.3.1 fourni par le constructeur, reporte les caractristiques du matriau du croisillon.
Pour avoir un marge de scurit, jai choisi dans la liste lalliage ENAC 41000 caractris par la plus basse
valeur de
de 70 MPa.
Pour les mtaux, la limite en cisaillement vaut en gnral entre 0,5 et 0,8 fois la limite en traction :
Reg = 0,5Re pour les aciers doux (Re 270 MPa) et alliages d'aluminium ;
Reg = 0,7Re pour les aciers mi-durs (320 MPa Re 500 MPa) ;
Reg = 0,8Re pour les aciers durs (Re 600 MPa) et les fontes.
La limite au cisaillement de lalliage sera de :
Il faut enfin tenir compte du facteur de scurit s que lon prend gal 4.
Finalement, on a :
En tenant compte que la section S est gale :
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 36 of 65 Mario Dionisio
On a :
Lpaisseur relle du rayon du croisillon est de 25 mm, donc :
La vrification au cisaillement est satisfaite.
Fig. II.3.3.1 Tableau des alliages daluminium
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 37 of 65 Mario Dionisio
2.3.4 Etude et vrification de la rsistance en flexion
Nomenclature
Contrainte normale maximale admissible la flexion du matriau
Moment flchissant maximum
Distance maximale entre le point neutre
Rsistance pratique lextension
Limite lastique la traction du matriau
Facteur de scurit
Moment quadratique
Base (largeur)
h Hauteur (paisseur)
Le rayon du croisillon sera sujet un effort de flexion lorsque le vrin enfonce le bouchon dans la bouteille.
On vrifie la rsistance en flexion dans la section du croisillon avec le moment flchissant maximum. Dans
cette section la contrainte normale
doit rester infrieure la contrainte limite admissible lie au
matriau. La contrainte maximale est :
Pour un profil rectangulaire, on a :
Et
En remplaant :
Et donc :
La hauteur relle du croisillon dans la section moment flchissant maximal tant de 125 mm donne :
La section du croisillon moment flchissant maximal est donc vrifie la flexion.
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 38 of 65 Mario Dionisio
2.3.5 Considrations des efforts sur les roulements
Lapplication de la force du vrin de bouchage se rpercute sur laxe de rotation du plateau et sur les
roulements. Les roulements originaires installs sont des 6205 ZR, billes une range, rainure
profonde. En considrant que :
- leffort en jeu calcul ci-dessus,
- le type de roulements existants installs,
- la ralisation est fin dmonstratif sur maquette,
ces roulements originaires nont pas t remplacs. Pour une utilisation du poste pour une production
effective, il est appropri de remplacer les 2 roulements billes contact radial avec des roulements en mesure
de supporter des efforts radiaux et axiaux. Ils peuvent tre toujours billes avec contact oblique ou bien avec
deux roulements coniques monts en O .
Fig. II.2.3.5a Typologie de roulements appropris pour lapplication pratique
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 39 of 65 Mario Dionisio
Fig. II.2.3.5b Tableau avec indiqu les roulements originaires
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 40 of 65 Mario Dionisio
II.2.4 CONCEPTION DES MCANISMES
2.4.1 Rotation du plateau
Pour dfinir les organes de rotation, je suis parti du calcul de la vitesse du plateau.
En faisant une simulation, la rotation dune phase, cest--dire 1/3 de tour, se droule en ~ 10 secondes. Une
rotation complte donc du plateau a lieu en 30, ce qui porte une rotation denviron 2 tours/min. Les
considrations qui suivent sur les engrenages portent au choix du moteur dcrit dans la partie lectrique.
2.4.2 Choix de lengrenage
Le plateau tournant doit tre mis en rotation travers un systme de transmission de larbre moteur. Jai eu
des difficults trouver un engrenage dpaisseur rduite et de diamtre appropri installer entre le
croisillon et la base du plateau tournant. Cest pour cela que jai utilis une transmission en chaine qui tait
disponible. Jai trouv des engrenages de diamtre de 135 mm pour la roue mene et 65 mm pour la roue
menante.
Dans ces conditions le rapport de transmission est de :
Le choix du moteur est dcrit dans la partie lectrique.
2.4.3 Mcanismes dalimentation des liges et capsules
Les mcanismes accessoires peuvent tre drivs des mcanismes principaux ou tre mus par une nergie
potentielle comme celle dun ressort ou encore tre actionns par une source dnergie toujours prsente et
dans tous les lieux : la gravitation universelle.
Le systme plus simple pour lalimentation des liges est celui de les prsenter en srie sur le point
dapplication. Cela veut dire que les liges, en srie, debout, un ct de lautre, sont placs dans un rail
jusqu lembouchure pour le bouchage sous le vrin. Le seul inconvnient est la motion des liges doit tre
dans ce cas procure ad hoc. Cela peut tre vit en utilisant un ressort qui pousse les liges vers
lembouchure. Une autre possibilit est celle de crer une dviation de 65 90 du rail (vers le haut) pour
utiliser la force de gravit, mme si un poids doit tre mis au-dessus du dernier lige pour les faire avancer.
Le lige la fin du rail se trouve dans lembouchure juste au-dessous de la tige du vrin. Quand la tige
descend, le lige est enfonc dans la bouteille. La tige sortie empche au lige successif de se dplacer jusque
quand elle remonte compltement. En ce moment-l, le lige est pouss dans lembouchure pour la prochaine
bouteille.
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 41 of 65 Mario Dionisio
Le mcanisme dalimentation des capsules est plus compliqu parce que plus difficile manipuler. Un systme
rail est utilis aussi dans ce cas, mais avec le chargement non continu, mais procur quand ncessaire. Afin
quil y ait lassociation bouteille prsente capsule charge / bouteille absente capsule non charge,
sagissant dun mcanisme driv et non propre, cest la bouteille mme qui doit lenclencher. En avanant, la
bouteille entraine un levier rotatif la hauteur du col de la bouteille. Le levier est solidaire axialement avec un
mcanisme dacheminement de la capsule jusqu un orifice juste au-dessus de la bouteille, ce qui la fait
tomber juste sur la tte de la bouteille bouche.
2.4.4 Mcanisme dtiquetage
Le mcanisme dtiquetage est constitu dun rouleau dbiteur dtiquettes, dun rouleau collecteur du papier
plastique de support et dun tambour de pression. Le tambour tiqueteur est mis en rotation par lavancement
de la bouteille sur le plateau tournant en y exerant une pression obtenue travers un ressort. Avec la rotation
du plateau tournant, la bouteille passe devant le tambour de pression pour un temps ncessaire pour
lapplication de ltiquette. Langle aigu form entre lavancement de ltiquette sur le support plastique vers la
bobine collectrice provoque le dcollage de ltiquette et sa dposition sur la bouteille.
2.4.5 Support pour les actionneurs
Il fallait un support central et latral soit pour les bouteilles que pour accueillir les actionnements. Jai utilis
un conteneur en acier inox pour lhuile dolives de 20 litres. Jai choisi un modle que, pour forme et
dimensions sadaptait aux besoins. Le diamtre de 30 cm est exactement celui fallait pour que la diffrence
entre le diamtre interne (conteneur) et externe (paroi fixe du plateau tournant) donnait juste lespace exact
pour le diamtre des bouteilles. Je lai fix sur laxe du plateau tournant en le renforant la base avec la
poulie de la cuve du lave-linge.
Les vrins 1 de remplissage et 3 de capsulage sont caractriss par des efforts minimaux. Le vrin 1 doit
vaincre seulement la rsistance du ressort en rentrant le bec de remplissage dans la bouteille tandis que le
vrin 3 doit simplement descendre le cylindre avec la rsistance de chauffage autour de la tte de la bouteille.
Par consquent, les organes de fixation sont des simples supports mtalliques. Pour le vrin 2 de bouchage, la
fixation a t choisie en mesure de rsister leffort maximal du vrin fourni par le constructeur de 1.178 N.
Les trois vrins ont t visss au col du conteneur en acier inox.
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 42 of 65 Mario Dionisio
II.3 Ralisation pneumatique
II.3.1 CONSIDERATIONS GENERALES
Les actionnements pour les trois phases du poste dembouteillage sont raliss avec un systme pneumatique
avec trois vrins : le premier pour appliquer te tuyau de remplissage sur la bouteille, de deuxime pour le
bouchage et le troisime pour le capsulage. Les vrins sont monts verticalement et axialement la tte de la
bouteille travers des supports mcaniques. Sur ceux-ci sont installs les distributeurs Camozzi 358-015-02,
5/2 aliments 24 V cc complets des lectrovannes. Une pompe est utilise pour le remplissage des bouteilles.
Fig. II.3.1 Schma du circuit pneumatique
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 43 of 65 Mario Dionisio
II.3.2 LES VERINS
Vrin n. 1
Le vrin de remplissage est un vrin Camozzi 24N2A20A050, double effet, magntique, course 50mm. En
considration du dsaxement entre laxe du vrin et laxe de la bouteille, la rigueur le vrin aurait d tre anti
rotation. Toutefois, jai utilis un vrin normal dont je disposais. Jai ralis lanti rotation en forant le
parcours dune tige solidaire avec la tige du vrin travers un illet solidaire avec le corps du vrin.
Vrin n. 2
Le vrin de bouchage est un vrin Festo ADVU-50-50-P-A, double effet, magntique, alsage 50 mm, course
50 mm. Fin de course :
Vrin n. 3
Le vrin de capsulage est un vrin Camozzi comme celui de remplissage.
II.3.3 POMPE DE REMPLISSAGE
Fig. II.3.2.1 Schma de principe de pompage du liquide
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 44 of 65 Mario Dionisio
Le remplissage avec le liquide est ralis par la dpression cre par la pompe dans la bouteille. La pompe
aspire lair dans la bouteille et cre son intrieur une pression infrieure la pression atmosphrique la
quelle est soumis le liquide dans le conteneur. Le circuit daspiration est form par, en ordre de la droite vers
la gauche, la pompe, le rcipient de trop plein, la bouteille et le conteneur de liquide, tous connects travers
des tuyaux. Le bec est form par deux tuyaux coaxiaux glissants lun dans lautre laide dun ressort : le
premier est connect au conteneur, le deuxime au rcipient de trop plein. Les tuyaux son mis en
communication quand le bec entre dans la bouteille. Dans cette condition, avec le conteneur connect travers
un tuyau la bouteille, le liquide est pouss par la pression atmosphrique dans la bouteille. Le circuit
entre les deux tuyaux tant ouvert, le liquide entre et tombe dans la bouteille tandis que lair continue tre
aspire. A bouteille remplie, ds que le liquide atteint le bec de remplissage, il ny a plus daspiration dans la
bouteille car lorifice daspiration est bouch par le liquide mme. Le remplissage de la bouteille sarrte mais
le liquide est court-circuit avec le rcipient de trop plein et si la pompe reste en marche, le liquide y se
rcolte lintrieur. Le bec de remplissage remonte, le ressort pousse le tuyau extrieur vers le bas en
clturant la sortie avec un joint. Ceci garantit une absence totale de fuites de liquide. Ce fonctionnement
indique clairement que le systme seul est auto contrl pour larrt du remplissage et naurait pas besoin
dlectrovanne pour arrter le flux du liquide. Toutefois, jai d installer un dtecteur de proximit capacitif de
liquide pour informer lautomate quil y a des oprations faire aprs la dtection de bouteille remplie.
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 45 of 65 Mario Dionisio
II.4 Ralisation lectrique
II.4.1 CONSIDERATIONS GENERALES ET DE SECURITE
Lalimentation des bobines des distributeurs est 24 Vcc, tandis que le moteur et la rsistance sont aliments
230 V. En considrant que ces installations se trouvent sur un chssis totalement mtallique, les normes de
scurit imposent quune protection contre les contacts directs et indirects soit installe. Ceci est accompli par
un interrupteur diffrentiel de 30 mA. Un disjoncteur magntothermique de 16 A protge le systme des
courts-circuits et des sur-courants. Une prise de service est aussi installe. Un tableau de trois ranges rail
DIN recueille les commandes et autres dispositifs de la partie lectrique. La distribution des composants
lectriques est homogne, regroupant les mmes types de dispositifs et de manire faciliter les
interconnexions.
Le circuit darrt durgence de catgorie 0 est ralis avec un bouton-poussoir cl cbl sur un contacteur de
lalimentation du systme.
Lalimentation de lautomate est spare et est aliment travers un disjoncteur de 10 A.
Sur la base des requis techniques, jai pris en considration, pour la motorisation du plateau tournant, deux
types de moteurs :
- moteur pas pas ;
- moteur asynchrone AC basse vitesse (un grand nombre dengrenage de rduction), ventuellement avec
piston de blocage. Les deux mthodes se prtent au fonctionnement du systme, chacune avec ses propres
caractristiques.
Le systme dembouteillage nexige pas un degr de prcision millimtrique et des rotations et manipulations
en avant et en arrire complexes. Il sagit seulement de dplacer le plateau tournant de 120 par phase avec un
dplacement dans la mme direction qui ne varie pas dans le temps.
Le moteur pas pas est caractris par des mouvements de prcision millimtrique et permet la rotation en
avant et en arrire. Utiliser un moteur pas pas pour un mouvement rotatoire simple serait le sous-utiliser par
rapport ses multiples potentialits. Aussi, il faut tenir en compte quil est plus coteux. En dfinitive, jai
utilis un moteur asynchrone avec un rducteur du nombre de tours important. La forte rduction du nombre
de tours implique que larbre ne se dplace pas librement en position darrt du moteur. Aussi, larbre sarrte
instantanment la coupure de lalimentation et cela rpond aux requtes du systme raliser.
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 46 of 65 Mario Dionisio
Fig. II.4.1 Schma lectrique
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 47 of 65 Mario Dionisio
4.3.1 Calcul de la puissance du moteur lectrique
Nomenclature
Rendement
Puissance utile
Puissance fournie
Couple en sortie, en entre
Diamtre engrenage en sortie, en entre
Vitesse angulaire en sortie, en entre
Rapport de rduction
Moment dinertie du plateau
Temps
Angle parcouru par le tambour dans la phase dacclration
La puissance fournie pour le moteur est gale celle requise par le plateau tournant plus les pertes ou bien en
parlant en termes de rendement :
On calcule la puissance utile :
La vitesse angulaire peut tre trouve partir du nombre de tours par minute. Pour trouver le couple, on peut
parler en termes dnergie et on peut tablir, moins des pertes:
Cest--dire :
Ou bien :
En isolant C :
Mais:
Et donc:
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 48 of 65 Mario Dionisio
La vitesse du plateau tournant de 2 t/min est gale en rad/s :
La masse est gale celle du tambour plus, dans les conditions les plus contraignantes, celle de 3 bouteilles
pleines, pour un total de 2 + 3 = 5 Kg.
Pour une vitesse rgime de 2 tours par minute, langle parcouru par le tambour est minimal. On considre
= 0,001 rad.
Le rayon du tambour est de 0,24 m.
Le couple requis par le plateau tournant est donc :
On reporte le couple en sortie requis par le plateau tournant sur larbre du moteur en tenant compte du
rapport de rduction des engrenages et du rendement.
En utilisant la formule du rendement, on a :
Or, on a :
(1)
Et donc:
(2)
Calcul de i :
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 49 of 65 Mario Dionisio
O d1 et d2 sont les diamtres de lengrenage du moteur et du plateau respectivement.
De la (2), on obtient le couple demand sur larbre moteur en considrant que le rendement dune
transmission par chaine est de lordre de 98% :
La vitesse de larbre du moteur est dduite de la formule du rapport de rduction (1):
La puissance requise du moteur doit tre donc suprieure ou gale :
Le moteur utilis pour la maquette est un moteur de tournebroche caractris par une puissance de 14 W et
une vitesse de 2,5 t/min.
Durant linstallation, une difficult sest prsente pour ce qui regarde le sens de rotation du moteur.
Javais cr les supports pour un autre moteur auparavant, mais celui-ci na pas rsult bien appropri.
Successivement, en installant le moteur du tournebroche, le plateau tournait bien mais en sens inverse. Or on
ne peut inverser lectriquement le sens de rotation dun moteur asynchrone monophas. Ce petit moteur
asynchrone a comme stator une seule bobine sur un noyau qui prsente une ouverture circulaire pour
lemplacement du rotor. l'instar des autres moteurs asynchrones, la partie tournante est un rotor en cage
d'cureuil . Tout moteur monophas ncessite la production d'un champ magntique tournant pour
dmarrer. Dans ce moteur bague de dmarrage, une partie de chaque ple est munie d'une bague de cuivre
dite spire de Frager o des courants induits dphasent (retardent) le flux magntique dans cette partie du
ple suffisamment pour fournir un champ tournant. La position de ces bagues dtermine le sens de rotation
du rotor.
Pour viter de reconstruire les supports inverss du moteur, jai forc le moteur tourner dans le sens dont
javais besoin. Vu que le sens de rotation dpend de la position des spires de Frager, jai simplement renvers
le stator dans le carter du moteur. Jai d adapter les connexions lectriques, mais larbre du moteur tournait
alors dans le sens correct pour le poste dembouteillage.
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 50 of 65 Mario Dionisio
II.4.3 UNITE DE CAPSULAGE
Dans cette phase, la capsule thermo rtractable est chauffe pour un temps t ncessaire rtrcir la capsule
sur la tte de la bouteille. Jai ralis cela avec une rsistance de sche-cheveux passe sur les parois
intrieures dun cylindre en aluminium. Le cylindre est ouvert sur la base infrieure pour lintroduction de la
tte de la bouteille avec la capsule et est connect au centre de la base suprieure ferme la tige du vrin.
Pour lisolation lectrique et thermique jai utilis des supports en cramique. Jai coup des carreaux de
carrelage de 10 mm x 10 mm que jai for le long dune face pour le passage de la rsistance et
transversalement pour assurer lisolation lectrique avec la fixation sur le support mtallique.
La rsistance mesure a donn :
pour un courant de :
( )
En augmentant la rsistance avec laugmentation de la temprature, cette valeur diminue.
Lautomate commande la mise en tension de cette rsistance travers un rel.
Pour la ralisation de la spirale de lunit de capsulage, jai calcul le nombre de tours donner la spirale
lintrieur du cylindre en ayant la longueur de la rsistance connue de 750 mm.
La longueur dun arc de spirale est donn par :
Avec
Donc, pour un nombre de tours x de spirale, on a :
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 51 of 65 Mario Dionisio
Fig. 4.3.1 Calcul de la spirale de lunit de capsulage
En fixant un pas de 20 mm, le nombre de tours ncessaire pour 750 mm de longueur de la rsistance est de :
Le nombre de spires enroules a t de 3.
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 52 of 65 Mario Dionisio
II.5 Ralisation de la partie automation
II.5.1 CONSIDERATIONS GENERALES
Le systme est gr par lautomate Siemens S7 1200 AC/DC Rly caractris par 14 entres numriques, 10
sorties numriques relais, 2 entres analogiques et 2 sorties analogiques. La premire dmarche faite a t de
rdiger le bilan entres/sorties ncessaires pour le projet.
Bilan entres
1 M/A DIa0.0 Marche/Arrt
2 AU DIa0.1 Arrt d'urgence
3 RS DIa0.2 Reset System
4 CC DIa0.3 Capteur de niveau capacitif
5 PE DIa0.4 Position tape
6 PB1 DIa0.5 Position bouteille 1
7 PB2 DIa0.6 Position bouteille 2
8 PB3 DIa0.7 Position bouteille 3
9 CR DIb0.0 Contact rsistance
10 V1R DIb0.1 Vrin 1 rentr
11 V1S DIb0.2 Vrin 1 sorti
12 V2R DIb0.3 Vrin 2 rentr
13 V2S DIb0.4 Vrin 2 sorti
14 V3R DIb0.5 Vrin 3 rentr
15 V3S DIa0.0 Vrin 3 sorti
16 PB DIa0.1 Prsence bouchon
17 PC DIa0.2 Prsence capsule
18 Pet DIa0.3 Prsence tiquette
Bilan sorties
1 KM DQa0.0 Moteur plateau tournant
2 V1 DQa0.1 Vrin 1
3 V2 DQa0.2 Vrin 2
4 V3 DQa0.3 Vrin 3
5 PL DQa0.4 Pompe liquides
6 R DQb0.5 Rsistance
7 VVF DQb0.6 Voyant vert fixe
8 VVC DQb0.7 Voyant vert clignotant
9 VJC DQa0.0 Voyant jaune clignotant
10 VR DQa0.1 Voyant rouge
11 SIR DQa0.2 Sirne
Fig. II.5.1 Tableau entres/sorties
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 53 of 65 Mario Dionisio
Le bilan entres-sorties a rvl que seules celles de lautomate nauraient pas t suffisantes pour le projet.
Une expansion de 8 entres/8 sorties tait ncessaire. Jai achet une expansion module SM 1223 avec 16
DI/16 DO pour futures expansions ventuelles.
Sur la base des entres et sorties et sur les fonctionnalits requises du systme, jai dress le GRAFCET.
Il faut tout dabord considrer la hirarchie des commandes :
II.5.2 GRAFCET
5.2.1 Gestion scurit (GS)
Comme mis en vidence dans le chapitre 4, larrt durgence doit tre prioritaire sur toutes les autres
commandes et soit il doit tre gr par un automate de scurit, soit il doit tre cbl. Vu que lautomate
disponible nest pas de scurit, le bouton-poussoir darrt durgence a t cbl directement sur le contacteur.
Le dblocage du poussoir est mcanique cl et permet de redonner tension au systme travers le
contacteur.
Successivement, il faut rinitialiser le systme pour quun nouveau cycle puisse redmarrer. Lopration de
reset rentre tous les vrins, repositionne le plateau tournant sur Position tape . La signalisation de larrt
durgence, travers une lampe dalarme rouge et une sirne, et la rinitialisation du systme sont gres par
lautomate.
Fig. II.5.2.1 Grafcet systme dembouteillage Gestion scurit
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 54 of 65 Mario Dionisio
II.5.2.2 Gestion conduite (GC)
Afin quaprs une commande darrt de la production, le cycle sarrte seulement quand la dernire bouteille
prsente sur le plateau tournant soit sortie, la commande marche/arrt doit se trouver en dehors de la boucle
de gestion production automatique. Ceci est accompli dans la gestion conduite. Dans ce sous-programme,
peut tre implment la slection automatique/manuel quand une application le require.
Fig. II.5.2.2. Grafcet systme dembouteillage Gestion conduite
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 55 of 65 Mario Dionisio
5.2.3 Gestion production automatique (GPA)
Cest la programmation des tapes qui forment le procd de lembouteillage. Les trois phases se droulent en
parallle sur trois bouteilles diffrentes et en srie sur une mme bouteille. Cela permet dtablir que la phase
de remplissage, la plus longue en dure, commande lavancement du plateau tournant, lentre dune nouvelle
bouteille et la sortie de la bouteille pleine. Une fois acheves les phases de bouchage, capsulage et tiquetage,
aprs une brve temporisation, le moteur fait tourner le plateau tournant de 120 pour un nouveau cycle. On
note comme labsence dun lige ou dune capsule ou dune tiquette bloque le systme et commande la lampe
jaune clignotante jusqu la leur recharge. Le compteur des bouteilles remplies est appliqu la fin de la
temporisation du capsulage.
0
5 V2+
V2S
6 V2-
2 V1+
V1S
4 V1-
7 V3+
V3S
8 R
T2/X8/5s
PB1.V1R.PE PB2.V2R.PE PB3.V3R.PE
9 V3-
10 KM
PE
3 PL
CC
PL
V1R.V2R.V3R.t3/X9/5s
Grafcet Gestion Production Automatique (GPA)
1 VJC
PB+PC+Pet
CPT1:=CPT1+1
Fig. II.5.2.3 Grafcet systme dembouteillage Gestion Production Automatique
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 56 of 65 Mario Dionisio
5.2.4 Commande Marche-Arrt avec un bouton-poussoir
Avec le bouton-poussoir disponible, il fallait programmer lautomate de manire telle quil ny ait pas de
fausses commandes et/ou mal interprts d fondamentalement aux circuits de raction introduits. La
ralisation de figure excute la commande efficacement.
Fig. II.5.2.4 Schma Ladder Latch on-off push-button start-stop
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 57 of 65 Mario Dionisio
II.5.3 DISPOSITIFS DENTREE (CAPTEURS) ET DE SORTIE (ACTIONNEURS)
Les capteurs utiliss sont :
5.3.1 Fin de course (magntique) pour les vrins
a. Camozzi CST-CSV
Le capteur deux conducteurs est fix avec un clamp sur le vrin. Une vis permet de le bloquer.
b. Festo SME-8-K-LED-24
Le capteur est trois conducteurs avec la fixation ralise travers linsertion dans la rainure du vrin
mme.
5.3.2 Fin de course (mcanique) pour position tape et pour prsence bouteille
a. 3 fin de course ME-8169 auto-reset oscillant AC 380-250 V pour relever la prsence de la bouteille
dans chacune des tapes.
Fig. II.5.3.2 Fin de course bras oscillant
b. 1 fin de course rotule pour dtecter la position de ltape avec larrt du moteur.
5.3.3 Capteur capacitif pour dtection du niveau du liquide dans la bouteille
Ltat de remplissage de la bouteille est effectu par un capteur de proximit capacitif OMRON E2K-F10MC.
Fig. II.5.3.3a Capteur capacitif
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 58 of 65 Mario Dionisio
Ce capteur est un Flat-Pack rectangulaire en plastique, aliment en DC qui convient dans des installations avec
espaces exigus. Ses caractristiques sont :
Dtection sans contact mtallique de substances/objets mtalliques et non mtalliques tels que l'eau,
l'huile, verre, le plastique et le bois ;
Corps en plastique de 10 mm ;
Capteur non blind indicateur LED et sensibilit fixe ;
Amplificateur intgr DC qui fournit la commutation NPN de charges jusqu 100 mA.
Fig. II.5.3.3b Schma lectronique du capteur capacitif
Comme on peut voir sur le schma, le capteur a un transistor de sortie NPN, ce qui veut dire que, pour une
telle configuration, il doit recevoir une polarisation directe sur la jonction metteur-base et indirecte sur la
jonction base-collecteur. Le collecteur doit donc recevoir +24V travers la charge, i.e. le relais interne de
lentre de lautomate.
Hors lS7 1200 alimente la charge travers le ngatif et le circuit se ferme travers le contact dentre qui est
connect au positif. Dans ces conditions le capteur tait inutilisable. Il fallait un inverseur NPN-PNP. Jai
trouv en commerce linverseur No. XNPNPNP.
Fig. II.5.3.4 Inverseur de polarit et schma lectronique
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 59 of 65 Mario Dionisio
Cet inverseur convertit un signal dun capteur PNP en un signal NPN et vice-versa. Il permet d'adapter les
entres dun automate tous les capteurs sur le march quel que soit leur polarit de sortie.
Nanmoins, la fin, je nai pas pu utiliser ce dispositif non pour des raisons techniques, mais commerciales : le
lot minimum pour lachat tait de 5 inverseurs. Jai d y renoncer tout en cherchant de trouver une autre
solution.
Jai pens dutiliser un relais pour faire laccouplement des deux circuits avec alimentation incompatible tout
en laissant les 2 circuits spars. La seule chose vrifier tait si le courant absorb par la bobine du relais
tait infrieur au maximum de 100 mA comme indiqu dans les spcifications techniques du capteur. Jai
effectu cette mesure qui ma donn un rsultat de 20 mA, ce qui permettait dutiliser cette solution. Le circuit
est report en figure.
Fig. II.5.3.5 Circuit inverseur de polarit ralis avec relais
5.3.4 Fin de course pour liges, capsules, tiquettes
Il sagit de fin de courses simples mais avec un effort dactivation minimal vu que la prsence dune capsule,
assez lgre, doit tre en mesure de lactiver.
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 60 of 65 Mario Dionisio
II.6 Programmation et test
Le test du systme dembouteillage est effectu une fois complte la programmation et cest aussi quand la
programmation mme est vrifie et corrige ventuellement.
Il faut tout dabord analyser que toutes les entres physiques de la machine fonctionnent correctement. Cette
vrification est effectue en suivant le schma lectrique. Aprs cela, les sorties physiques sont contrles. La
vrification est faite aussi l'aide du programme de l'automate en mode en ligne qui donne la possibilit de
voir en temps rel l'volution de l'tat de chaque entre et sortie. Aprs, il faut vrifier que les signaux d'alarme
soient corrects. Complt le contrle du schma lectrique, il faut vrifier le synchronisme des actionneurs
avec les tapes et que les phases soient excutes correctement :
a. Niveau de remplissage
Il sagit de positionner le dtecteur la distance correcte du col de la bouteille afin quil soit activ par
le liquide qui arrive devant son aire de dtection et non par la bouteille mme si vide. Ceci a pris des
tentatives jusqu trouver la distance correcte.
b. Insertion du lige
Il sagit de rgler la vis de la tige du vrin pour trouver la longueur exacte.
c. Rsistance de capsulage
Il sagit de faire des essais de variation de la temporisation pour voir avec quel temps la capsule est
bien thermo rtracte.
Le fonctionnement correct des mcanismes accessoires dalimentation des liges, des capsules et des
tiquettes est aussi vrifi.
Larrt durgence et le reset successif sont vrifis. Larrt de la production est vrifi ce quelle se termine
bien quand la dernire bouteille sur le plateau est complte.
Quand les commandes vrifies rpondent correctement aux fonctions prvues, la version finale du
programme peut tre sauvegarde.
La mise jour de la documentation de projet peut tre acheve qui donnera lieu la documentation as
build ou finale.
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 61 of 65 Mario Dionisio
II.7 Relation et solde finaux
Du point de vue technique la ralisation du systme dembouteillage sest droule en manire
programmatique et coordonne. Quelques difficults se sont prsentes durant le droulement des travaux
(par exemple le sens de rotation du moteur, la difficult trouver des crous 22 pas fin et dautres
problmes mineurs), mais ont t matriss adquatement.
Du point de vue financier, le solde final dress dans le tableau de Fig. II.7.1 montre que, part pour les
matriaux qui nont pas ts achets, le cot final est en ligne avec les cots prvus. Le cot des matriaux non
achets, soit parce que jen disposais dj (pompe liquide, vrins), soit parce que jai cherch une solution pour
viter une dpense excessive, reprsente une pargne de 63% sur le cot des matriaux. Aussi, jai d tenir
compte des cots pour la conception et la main duvre. Pour la ralisation dune maquette de Travail de Fin
dEtudes, ces cots ne sont pas pris en compte et donc rduits zro. Cela reprsente une pargne de 31% sur
le budget et de 123% sur le cot final. En dautres termes, comme on peut le voir des tableaux du budget et du
dcompte, le cot de conception et ralisation est suprieur au cot des matriaux achets.
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 62 of 65 Mario Dionisio
Solde final pour le systme d'embouteillage
n. Description
Cot
unitaire
(HTVA)
Unit
Quantit
Cot Total
(HTVA)
I Cot total pour le projet 1.366,46
II Total matriaux 1.366,46
1 Automate Siemens S7 250,00 n. 1 250,00
2
Expansion entres/sorties 6ES7 223-1BL32-
0XB0 215,00 n. 1 215,00
3 Relais Finder 95.05 24V DC 24,00 n. 3 72,00
4 Bornier 1 et 2 tages 1,00 n. 20 20,00
5 24V R/Y/G buzzer Signal Safety Stack 25,00 n. 1 25,00
6 Pompe liquides - n. 1 -
7 Plateau tournant - n. 1 -
8 Vrin FESTO ADVU-50-50-P-A - n. 1 -
9 Vrin Camozzi 24N2A20A050 - n. 2 -
10 Fin de course Festo SME-8-K-LED-24 39,89 n. 2 79,78
11 Fin de course Camozzi CST-220 10,42 n. 4 41,68
12 Electrovannes + bobines 24 V 35,00 n. 3 105,00
13 Connections, silencieux, tuyau 40,00 n. 1 40,00
14 Fin de course mcanique ME-8169 10,00 n. 3 30,00
15 Bouton-poussoir arrt urgence 25,00 n. 1 25,00
16 Capteur capacitif Omron E2k-F10MC2 20,00 n. 1 20,00
17 Moteur lectrique 230V 14W 2,5 t/min 60,00 n. 1 60,00
18 Tableau lectrique 64,00 n. 1 64,00
19 Disjoncteur 16A 12,00 n. 1 12,00
20 Diffrentiel 30mA 40 A 82,00 n. 1 82,00
21 Contacteur CA3 DN40BD 27,00 n. 1 27,00
22 Cbles, conducteurs 50,00 n. 1 50,00
23 Conteneur Acier Inox 18-10, 20 Lt 50,00 n. 1 50,00
24 Pieds support acier peint blanc 6,00 n. 6 36,00
25 Profil en acier L 5,00 m. 3 15,00
26 Plaques acier de support 40,00 n. 1 40,00
27 Profil en aluminium U 7,00 m. 1 7,00
III Total main d'uvre -
1 Bureau d'tudes - h. 72 -
2 Technicien installateur - h. 72 -
Fig. II.7.1 Tableau solde final
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 63 of 65 Mario Dionisio
II.8 Conclusions
Dans ce travail de fin dtudes, on voit comme le processus volutif a conduit une intgration complte des
systmes mcaniques, lectriques, pneumatiques et lectroniques avec le support fondamental du systme de
contrle bas sur logiciel. Cela sidentifi dans les systmes mcatroniques modernes dans lesquels
l'intgration et l'interdpendance entre les diffrentes disciplines jouent un rle cl.
Pour aborder et raliser un projet complet dans toutes ses fonctionnalits, il est ncessaire de connatre, de
comprendre et d'identifier toutes les parties en jeu dans le systme jusquau moindre lment accessoire. Ce
n'est qu'aprs la dtection de ces caractristiques requises que l'excution du projet peut commencer.
Un aspect fondamental dans ce travail (et dans le travail industriel) est le choix. Le choix de la solution la plus
adquate au problme qui se prsente, doit tenir compte de nombreux lments, soit entre diffrentes
solutions techniques, soit pour le rapport cot/bnfice. Ceci porte invitablement parfois des compromis.
Cest dans cette phase cruciale que le concepteur, en force de ses connaissances non seulement techniques
mais aussi conomiques et managriales, doit faire un choix qui assure la fonctionnalit technique tout en
respectant le budget.
Un des lments intressants de ce travail a t la traduction des cycles machine conus a priori dans la
programmation ladder disponible avec l'automate. Etant une modalit de programmation intuitive et
immdiate, la programmation ladder a rendu plus facile la ralisation des algorithmes rsolutifs des
fonctions requises par le systme.
Les difficults rencontres rentrent dans la normalit pour la ralisation dun projet avec un minimum de
complexit. Il faut tenir compte que quand il sagit de projets grands et coteux, un certain pourcentage du
budget est rserv aux vnements imprvisibles qui peuvent affecter le projet. Ce ne sont pas ces
vnements qui arrtent le projet. Avec une approche systmatique, des contremesures ad hoc sont prises
pour les annuler.
Mater artium necessitas, la ncessit est mre de l'invention: ce proverbe latin est toujours rflt dans les cas
o il est ncessaire daller juste un peu plus loin de la limite que la difficult semblait avoir impos.
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 64 of 65 Mario Dionisio
II.9 Photos de la ralisation
IEPSCF - Uccle
Projet de fin dtudes Systme dembouteillage
Bruxelles, 25 novembre 2013 Page 65 of 65 Mario Dionisio
Bibliographie
- Guide de mcanique J.L. Fanchon
- Guide du dessinateur industriel A. Chevalier
- Guide des sciences et technologies industrielles - J.L. Fanchon
- Corso di Meccanica Applicata e Macchine al Fluido ing. N. Corigliano
- Corso di meccanica C. Pidatella G. Ferrari Aggradi D. Pidatella
- Siemens Simatic S7-1200 Easy Book Manual Siemens
- Safe Book 4 Rockwell Automation
- Guide pour lapplication de la directive Machines 2006/42/CE CE
- I controllori a logica programmabile Giuseppe Porcaro, Maria Tattoli
- Arresto di emergenza ANIE Federazione Nazionale Imprese Elettriche ed Elettroniche
***********************************************************
Fin systme dembouteillage
Vous aimerez peut-être aussi
- 07 - Lili Est AmoureuseDocument23 pages07 - Lili Est AmoureuseKail FacilierPas encore d'évaluation
- Rapport de Stage 2 PDFDocument57 pagesRapport de Stage 2 PDFTariq AKHBAZ100% (4)
- Conception Et L'automatisation - Chahbouni Rabab - 2590Document63 pagesConception Et L'automatisation - Chahbouni Rabab - 2590وسيم زعفوريPas encore d'évaluation
- Cours 12 Exemples Grafcet Et GEMMADocument7 pagesCours 12 Exemples Grafcet Et GEMMAimen mehri100% (3)
- Mini ProjetDocument3 pagesMini ProjetFakhreddine Okail67% (3)
- Configuration DDocument44 pagesConfiguration DGray Ab100% (2)
- Grafcet Exercice n3 4Document4 pagesGrafcet Exercice n3 4khocine100% (2)
- Mini Projet de EsaDocument30 pagesMini Projet de EsaBakr IbrahimiPas encore d'évaluation
- Monte ChargeDocument9 pagesMonte ChargeSaid BennayaPas encore d'évaluation
- Presentation Automate ProgrammableDocument21 pagesPresentation Automate ProgrammableAmine100% (1)
- TPFEUX tSTIDocument5 pagesTPFEUX tSTIchichan1leo1ibn1adam100% (1)
- Un Systeme de Tri Et L Assemblage de PieDocument31 pagesUn Systeme de Tri Et L Assemblage de PieAmrouchene Djouher100% (1)
- Bentaleb-Gasmi - Etude D'une Imprimante 2DDocument83 pagesBentaleb-Gasmi - Etude D'une Imprimante 2DHassenKhlifiPas encore d'évaluation
- Rapport PfaDocument58 pagesRapport PfaMed baskounPas encore d'évaluation
- Rapport TP Actionneur H&P El Haska Joubir Machmachi LahkimDocument31 pagesRapport TP Actionneur H&P El Haska Joubir Machmachi LahkimJoubir AliPas encore d'évaluation
- Projet Fin D'étude de LicenceDocument51 pagesProjet Fin D'étude de LicenceMohamedPas encore d'évaluation
- Ascenseur PDFDocument6 pagesAscenseur PDFSamira ErramiPas encore d'évaluation
- Grafcet Intro V2 FRDocument50 pagesGrafcet Intro V2 FRJasminPas encore d'évaluation
- 02 Cablage Api PDFDocument29 pages02 Cablage Api PDFAdil EL AttarPas encore d'évaluation
- Chapitre 4Document29 pagesChapitre 4Mouni TadjerPas encore d'évaluation
- Présentation API S7-300 PDFDocument4 pagesPrésentation API S7-300 PDFjamal64722111Pas encore d'évaluation
- 01 - Séminaire API TELEMECANIQUE - GE-FF-S01Document111 pages01 - Séminaire API TELEMECANIQUE - GE-FF-S01BOURASSPas encore d'évaluation
- Test QCM Sur Le Protocole ModbusDocument6 pagesTest QCM Sur Le Protocole ModbusAngèle BoudaPas encore d'évaluation
- Etude Theorique D'un Banc DidactiqueDocument57 pagesEtude Theorique D'un Banc DidactiqueWael HechmiPas encore d'évaluation
- Rapport Projet D'automatisationDocument17 pagesRapport Projet D'automatisationAII100% (2)
- Chapitre - Mise en Équation GrafcetDocument5 pagesChapitre - Mise en Équation Grafcetfakhfakh100% (1)
- Structuration Par Macro-Etapes Et Encapsulation Du Malaxeur 2 2Document4 pagesStructuration Par Macro-Etapes Et Encapsulation Du Malaxeur 2 2JackoAyew0% (1)
- Rapportsyrine 1 RéparéDocument29 pagesRapportsyrine 1 RéparéZied SanaaPas encore d'évaluation
- Etude Et Automatisation D'une Station de Lavage Programmation Sous STEP7Document79 pagesEtude Et Automatisation D'une Station de Lavage Programmation Sous STEP7هاني ميساويPas encore d'évaluation
- Projet Montre DigitaleDocument27 pagesProjet Montre DigitaleMalika Hamdi100% (1)
- PFE PORTE MecaniqueDocument85 pagesPFE PORTE Mecaniquehss67% (3)
- Support Automatisme PihDocument90 pagesSupport Automatisme PihSizer FlexPas encore d'évaluation
- Commande D'Un Bras Manipulateur Par Automate Programmable Industriel (A.P.I)Document128 pagesCommande D'Un Bras Manipulateur Par Automate Programmable Industriel (A.P.I)AFAFPas encore d'évaluation
- Rapport Mécatronique Mini Projet PDFDocument9 pagesRapport Mécatronique Mini Projet PDFAyoub BahtatPas encore d'évaluation
- Ds Automatisme JuinDocument3 pagesDs Automatisme JuinAmira Warhéni100% (1)
- Application de Contrôle de Température Par Un Régulateur PID Et LDocument29 pagesApplication de Contrôle de Température Par Un Régulateur PID Et Lessoubaifatimafm100% (1)
- Devoir de Synthèse N°1 - Technologie Système de Fabrication Des Boites en Plastique - 1ère AS (2010-2011) Mlle AddedDocument4 pagesDevoir de Synthèse N°1 - Technologie Système de Fabrication Des Boites en Plastique - 1ère AS (2010-2011) Mlle Addedntayoub100% (1)
- Grafcet 5Document2 pagesGrafcet 5Tarek MehdidPas encore d'évaluation
- td1 AutomatismeDocument6 pagestd1 AutomatismeDhoha GasmiaPas encore d'évaluation
- RapportDocument66 pagesRapportAnis SaadouliPas encore d'évaluation
- Pfe FinalDocument45 pagesPfe FinalSakhori0% (1)
- TPN°14 - Mémoire - Temporisation - Comptage - PL7 PRO - CorrigéDocument13 pagesTPN°14 - Mémoire - Temporisation - Comptage - PL7 PRO - CorrigébelkacemiPas encore d'évaluation
- Zelio Sur Douille 35 104Document70 pagesZelio Sur Douille 35 104moplkiPas encore d'évaluation
- TD GrafcetDocument4 pagesTD GrafcetPro Perfec50% (4)
- Cahier Des ChargesDocument5 pagesCahier Des ChargesWill Azangue100% (1)
- Exercices de GrafcetDocument3 pagesExercices de Grafcetsalimiyouness0% (1)
- LadderDocument1 pageLadderMounir Hadrich0% (1)
- Exercices Grafcet - RevisionDocument17 pagesExercices Grafcet - RevisionMohamed LarbiPas encore d'évaluation
- Rapport Final Du Pfe PDFDocument74 pagesRapport Final Du Pfe PDFHåyamùøš Elrävø Svcēntrøī100% (1)
- Département Génie Electrique: I S É R TDocument4 pagesDépartement Génie Electrique: I S É R THend ChammamPas encore d'évaluation
- TP Api1-5 S7-200 Poste DechargementDocument6 pagesTP Api1-5 S7-200 Poste DechargementJawher SalemPas encore d'évaluation
- Le Rapport de TP Du Pneumatique Sous FluidSim 06.06.2011Document20 pagesLe Rapport de TP Du Pneumatique Sous FluidSim 06.06.2011Yassine Chentouf0% (1)
- TP Automatisme Cahier Des Charges AscenseurDocument4 pagesTP Automatisme Cahier Des Charges AscenseurAbdelali GougouPas encore d'évaluation
- Les Éléments D'un GRAFCETDocument6 pagesLes Éléments D'un GRAFCETMed Najjar100% (1)
- Traduction GRAFCET-LADDER (Suite)Document9 pagesTraduction GRAFCET-LADDER (Suite)Yassine Ramli100% (1)
- TEST N°2-1°A - Remplissage Du GazDocument3 pagesTEST N°2-1°A - Remplissage Du GazMehdi Ben Arif83% (6)
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- CoursCobol Id4966Document46 pagesCoursCobol Id4966CHERNI ANISPas encore d'évaluation
- Dimensionnement D'une Installa - Oussama MOUZOUAD - 4771Document39 pagesDimensionnement D'une Installa - Oussama MOUZOUAD - 4771toniPas encore d'évaluation
- VignerDocument114 pagesVignerABDEL PAGNA KARIMPas encore d'évaluation
- Rapport Journalier-Hotel Manzil 08-04-2021-2Document15 pagesRapport Journalier-Hotel Manzil 08-04-2021-2mhdPas encore d'évaluation
- Joint Carrelage Nature Et HarmonieDocument1 pageJoint Carrelage Nature Et HarmonieAmelia RotarPas encore d'évaluation
- COURS METABOLISMES L2 2016 COUVELARD - Copie PDFDocument98 pagesCOURS METABOLISMES L2 2016 COUVELARD - Copie PDFtourePas encore d'évaluation
- Programme Formation Ponts Roulants Et Portiques Concernes 1583510289Document2 pagesProgramme Formation Ponts Roulants Et Portiques Concernes 1583510289Noureddine Chibane0% (1)
- 2 As Projet 3Document51 pages2 As Projet 3صفاء الراوي100% (3)
- MAN-074 Microsed MANUELDocument26 pagesMAN-074 Microsed MANUELCharlys RajaobelinaPas encore d'évaluation
- Check List Verifications VehiculeDocument2 pagesCheck List Verifications Vehiculemaboite59300Pas encore d'évaluation
- 2 - TD Place de L'anamnèse Dans Le Diagnostic Des PathologiesDocument8 pages2 - TD Place de L'anamnèse Dans Le Diagnostic Des PathologiesFarah B. BtoushPas encore d'évaluation
- Evacuation Eaux For WebDocument82 pagesEvacuation Eaux For Webcyrillekamga100% (1)
- Déprises Sexuelles - Penser Le Vieillissement Et La SexualitéDocument13 pagesDéprises Sexuelles - Penser Le Vieillissement Et La SexualitéDarou BoromPas encore d'évaluation
- Organigramme Ed BisDocument1 pageOrganigramme Ed Bisapi-709709607Pas encore d'évaluation
- Userguide2907292 BRANDT MALICE A CLASSDocument28 pagesUserguide2907292 BRANDT MALICE A CLASSENZOPas encore d'évaluation
- Damnes 1 - Kate, LaurenDocument286 pagesDamnes 1 - Kate, Laurenmélina MagosPas encore d'évaluation
- TD3 Automatisme MECA2Document5 pagesTD3 Automatisme MECA2mkw21Pas encore d'évaluation
- PilesDocument6 pagesPilesmohamed laghribPas encore d'évaluation
- Travailler Sur Des Sujets de Brevet - SVT - 3e - Assistance Scolaire Personnalisée Et Gratuite - ASPDocument7 pagesTravailler Sur Des Sujets de Brevet - SVT - 3e - Assistance Scolaire Personnalisée Et Gratuite - ASPHayet Ben SaidPas encore d'évaluation
- CTN 39 Construction - BatimentDocument22 pagesCTN 39 Construction - Batimentftoufik_dzPas encore d'évaluation
- BS en 3-9 2006 Ac-2007-10Document15 pagesBS en 3-9 2006 Ac-2007-10Abey VettoorPas encore d'évaluation
- Controle Alimentation CalculateurDocument8 pagesControle Alimentation CalculateurZakaria BrakhesPas encore d'évaluation
- Sawadogo Martine 2016 ThèseDocument130 pagesSawadogo Martine 2016 Thèsezrasmata8Pas encore d'évaluation
- Liste Des Découvertes Et Inventions Liées Au Hasard - WikipédiaDocument28 pagesListe Des Découvertes Et Inventions Liées Au Hasard - WikipédiaberhousaPas encore d'évaluation
- Exercices Corrigs Nomenclature Chimie Organique PDFDocument2 pagesExercices Corrigs Nomenclature Chimie Organique PDFMarcus67% (9)
- casa-CONV-ITS 1G-02 10 2022Document18 pagescasa-CONV-ITS 1G-02 10 2022KHAMLYCH TECHPas encore d'évaluation
- Deleage Tai62Document2 pagesDeleage Tai62zesty514Pas encore d'évaluation
- 01.6 Métabolisme Du GlycogèneDocument7 pages01.6 Métabolisme Du Glycogènewassimm31Pas encore d'évaluation
- Francese: La Brigade de Cuisine 2 (Più Completa)Document5 pagesFrancese: La Brigade de Cuisine 2 (Più Completa)Van Morrison100% (1)
- Critere de Sortie SspiDocument1 pageCritere de Sortie SspiMed Iyad AtPas encore d'évaluation
- 01 Poly Item01 PDFDocument33 pages01 Poly Item01 PDFteofilo dominguezPas encore d'évaluation
- Certificat D'engagement Et de Connaissance Chien V1.4Document2 pagesCertificat D'engagement Et de Connaissance Chien V1.4TREDETPas encore d'évaluation