Vous aimerez peut-être aussi
- Procédé de Construction EnspDocument55 pagesProcédé de Construction EnspThony LikengPas encore d'évaluation
- Flexion DevieeDocument8 pagesFlexion Devieealaa2222Pas encore d'évaluation
- 1 - L3-GC-Calcul Des Structures-Cours 1 - Chap 3Document5 pages1 - L3-GC-Calcul Des Structures-Cours 1 - Chap 3Tarike Zohir100% (1)
- Devoir - Calcul Des StructuresDocument5 pagesDevoir - Calcul Des StructuresMohamed KanzoutPas encore d'évaluation
- Methode Forces ResumeDocument2 pagesMethode Forces ResumetohouriPas encore d'évaluation
- Cours Calcul de StructureDocument64 pagesCours Calcul de StructureRedouane Reda100% (1)
- Noyau CentralDocument6 pagesNoyau Centralbakhos100% (2)
- Exemples Patrick PaultreDocument41 pagesExemples Patrick Paultremostefaoui mohammed100% (1)
- Cours11Coefficients Dinfluence de RigiditéDocument6 pagesCours11Coefficients Dinfluence de RigiditéMoulay ZoubirPas encore d'évaluation
- Cours RDM 5 SuperpositionDocument5 pagesCours RDM 5 SuperpositionSou Hirr100% (1)
- Cours RDM BOURAHLA PDFDocument290 pagesCours RDM BOURAHLA PDFSmaali Bouzaine100% (1)
- Treillis RDMDocument10 pagesTreillis RDMSamagassi Souleymane0% (1)
- Cours - Construction Métallique - 1 - Chapitre - 2 - Eléments Comprimés Et TendusDocument32 pagesCours - Construction Métallique - 1 - Chapitre - 2 - Eléments Comprimés Et TendusMezniPas encore d'évaluation
- CH9 CDS-Calcul Des Arcs HyperstatiquesDocument8 pagesCH9 CDS-Calcul Des Arcs HyperstatiquesidrissasaPas encore d'évaluation
- Cours de RDM 3: Ecole Superieure Des Travaux Publics (Suptp)Document19 pagesCours de RDM 3: Ecole Superieure Des Travaux Publics (Suptp)DrancyPas encore d'évaluation
- Examen Charpente MetalliqueDocument6 pagesExamen Charpente MetalliqueRAHMA ABDELLIPas encore d'évaluation
- RDMDocument57 pagesRDMKhairi Soudani67% (3)
- Devoir de Construction Mixte 0Document15 pagesDevoir de Construction Mixte 0Ahmed DiagnePas encore d'évaluation
- Cours BA ST2 Chap 5Document9 pagesCours BA ST2 Chap 5sinshay100% (1)
- Mecanique Et RDM - Exercices Tome 1Document86 pagesMecanique Et RDM - Exercices Tome 1Abir Mabrouki100% (5)
- Resumer RDMDocument3 pagesResumer RDMMarioPas encore d'évaluation
- Méthodes ÉnergétiqueDocument6 pagesMéthodes ÉnergétiqueNawres MsakniPas encore d'évaluation
- Sequence 14-C4 Actions Permanentes Et VariablesDocument12 pagesSequence 14-C4 Actions Permanentes Et VariablesAnis SouissiPas encore d'évaluation
- Chapitre 5 Ba TractionDocument6 pagesChapitre 5 Ba TractionmtssofienePas encore d'évaluation
- Chapitre 2. Systèmes de Forces THDocument24 pagesChapitre 2. Systèmes de Forces THYounoussa TogoPas encore d'évaluation
- Cours de Beton Arme IDocument72 pagesCours de Beton Arme ITofradoPas encore d'évaluation
- CCV223-2009-Session 1 Avec CorrectionasafaafagafagaDocument7 pagesCCV223-2009-Session 1 Avec CorrectionasafaafagafagaTareck Bou JaoudePas encore d'évaluation
- Castem TP PDFDocument12 pagesCastem TP PDFAmin HentetiPas encore d'évaluation
- Syllabus Béton Armé Corrigé 2 - CopieDocument51 pagesSyllabus Béton Armé Corrigé 2 - CopieEmmanuel100% (2)
- Mecanique Des StructuresDocument89 pagesMecanique Des StructuresBoucharebKarimPas encore d'évaluation
- TP Robot 1Document16 pagesTP Robot 1Rafik SaadaPas encore d'évaluation
- Treillis Isostatiques Cour Et TDDocument10 pagesTreillis Isostatiques Cour Et TDdesiréPas encore d'évaluation
- Introduction A La RDMDocument7 pagesIntroduction A La RDMKamel Ibrahim100% (1)
- Tab KDocument1 pageTab KSpeculum de AquaPas encore d'évaluation
- Chapitre 3 Méthode Des DéplacementsDocument12 pagesChapitre 3 Méthode Des DéplacementsMohamed IzikiPas encore d'évaluation
- Connaissance de La Mécanique Appliquée BAEL BTP-TSCTDocument109 pagesConnaissance de La Mécanique Appliquée BAEL BTP-TSCTIkram Khalyl100% (3)
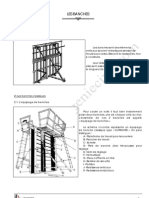
- Cours Banches Procedes Generaux de ConstructionDocument7 pagesCours Banches Procedes Generaux de Constructionjoujounounou100% (1)
- Exercice Theorie Des PoutresDocument12 pagesExercice Theorie Des PoutresSamiha LAROBI100% (1)
- Cours Mecanique RDM BTSDocument29 pagesCours Mecanique RDM BTSAbdelwahad Saghrouchni100% (1)
- Cours de Theorie Des poutres-ESGE 2020Document71 pagesCours de Theorie Des poutres-ESGE 2020Moussa Faye100% (2)
- TD CisaillementDocument1 pageTD CisaillementChay MaPas encore d'évaluation
- Encastrement ParfaitDocument3 pagesEncastrement Parfaitimsovanara5310100% (1)
- Exercice de RDMDocument9 pagesExercice de RDMELbouisfi Radouane100% (3)
- Cours de Structure PDFDocument67 pagesCours de Structure PDFAbdel Aziz Toumi100% (2)
- Actions Et Sollicitations 1Document2 pagesActions Et Sollicitations 1dib mohamed100% (1)
- L'architecture et la construction pratique: Mise à la portée des gens du monde, des élèves et de tous ceux qui veulent faire bâtirD'EverandL'architecture et la construction pratique: Mise à la portée des gens du monde, des élèves et de tous ceux qui veulent faire bâtirPas encore d'évaluation
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- L' Ingénieur et le développement durableD'EverandL' Ingénieur et le développement durableÉvaluation : 2 sur 5 étoiles2/5 (1)
- Lecon 216Document24 pagesLecon 216Youssef ZentarPas encore d'évaluation
- 7 - Mouvement de Rotation D'un Solide Autour D'un Axe FixeDocument8 pages7 - Mouvement de Rotation D'un Solide Autour D'un Axe Fixefle92Pas encore d'évaluation
- Mecanique de Solide - ExamDocument2 pagesMecanique de Solide - ExamHenAbdoPas encore d'évaluation
- PDF Ptsi TD Dynamique PDF - CompressDocument14 pagesPDF Ptsi TD Dynamique PDF - CompressYohann NgankongPas encore d'évaluation
- Physique 1Document5 pagesPhysique 1Ariss TiderPas encore d'évaluation
- CF 14-15 MaDocument2 pagesCF 14-15 MaadilbourejylahPas encore d'évaluation
- Corrige 2019Document16 pagesCorrige 2019Monsif maaroufyPas encore d'évaluation
- Mécanique 2 - Préparation Aux Exams 6Document3 pagesMécanique 2 - Préparation Aux Exams 6Joseph TemboPas encore d'évaluation
- ChuteTartine ReductionNiO DiffusionBarreDocument31 pagesChuteTartine ReductionNiO DiffusionBarrem0lcKy best playerPas encore d'évaluation
- Projet Travaux de VRD P/S Des 350 Logts Lpl+300 Logts Aadl A El Hamri Commune de ChetouaneDocument9 pagesProjet Travaux de VRD P/S Des 350 Logts Lpl+300 Logts Aadl A El Hamri Commune de Chetouaneyahlali khaledPas encore d'évaluation
- CANIVEAU 50x50x200Document1 pageCANIVEAU 50x50x200Francis Zenwan Asouan DessoignyPas encore d'évaluation
- Risques ChimiquesDocument31 pagesRisques ChimiquesZakaria Zéko BennaouiPas encore d'évaluation
- Selection Table Stick Electrodes FRDocument1 pageSelection Table Stick Electrodes FRLUC BALOMOCK BIIGAPas encore d'évaluation
- Cma 1Document26 pagesCma 1Abdou SaiPas encore d'évaluation
- Cours RDM T1 + GME1Document124 pagesCours RDM T1 + GME1robin barracouPas encore d'évaluation
- Programme Des Controles EMD 1ére Année Master1 FinaleDocument3 pagesProgramme Des Controles EMD 1ére Année Master1 FinaleAziz KrPas encore d'évaluation
- Wae24170ff FRDocument8 pagesWae24170ff FRdocflixPas encore d'évaluation
- Cours Matériaux Électrotechnique 01Document49 pagesCours Matériaux Électrotechnique 01Aymen Bhd0% (1)
- Ba Poutres IsostatiquesDocument11 pagesBa Poutres IsostatiquesTOVIHO SessinouPas encore d'évaluation
- FT n02 Mts 220 Tripolaire 66 Ceinture BeltedDocument2 pagesFT n02 Mts 220 Tripolaire 66 Ceinture Beltedأمين توات الجزائريPas encore d'évaluation
- Détergents Industriels Détergents Pour Les Professionnels Et Produits AssociésDocument23 pagesDétergents Industriels Détergents Pour Les Professionnels Et Produits AssociésLuz DelsolPas encore d'évaluation
- Polycopié Exercices Corrigés Chimie Des Solutions Aqueuses Chimie 03 - 2ème Année - CompressedDocument84 pagesPolycopié Exercices Corrigés Chimie Des Solutions Aqueuses Chimie 03 - 2ème Année - CompressedAbdoul SawadogoPas encore d'évaluation
- Controle Produit FabriquéDocument10 pagesControle Produit FabriquéBQPas encore d'évaluation
- 1cm5oh2iq 608427Document2 pages1cm5oh2iq 608427Moussa DiopPas encore d'évaluation
- La, PileDocument7 pagesLa, PileBoukhelif BoualemPas encore d'évaluation
- FT - Pes o 35atDocument1 pageFT - Pes o 35atmonrmPas encore d'évaluation
- Chapitre1 - Rappels. Définition Et Classification Des MateriauxDocument6 pagesChapitre1 - Rappels. Définition Et Classification Des MateriauxFatma Saad Ep JellaliPas encore d'évaluation
- Cours Partie 3 Et 4 FI GMQE - Verres Et Céramiques - S3-07-11-2022Document30 pagesCours Partie 3 Et 4 FI GMQE - Verres Et Céramiques - S3-07-11-2022Fadwa Asri100% (1)
- Ecoulements Souterrains "Ecoulements en Milieux Naturels" Cours M1 MU4MEF04Document36 pagesEcoulements Souterrains "Ecoulements en Milieux Naturels" Cours M1 MU4MEF04Fanambinantsoa Eddy RAKOTONDRAZAFYPas encore d'évaluation
- T E Materiaux Les Liants Reponses PDFDocument11 pagesT E Materiaux Les Liants Reponses PDFBELSPas encore d'évaluation
- Modele Inventaire Reseau Decret 270112Document12 pagesModele Inventaire Reseau Decret 270112Benouna FertPas encore d'évaluation
- Courbes Intéraction ELS ELU Pour PieuxDocument3 pagesCourbes Intéraction ELS ELU Pour PieuxRabie SehliPas encore d'évaluation
- Sujets Examens Elasticit 2 PDFDocument13 pagesSujets Examens Elasticit 2 PDFaaerPas encore d'évaluation
- Burkina 1 Aciers IIDocument16 pagesBurkina 1 Aciers IIWatsopPas encore d'évaluation
- TP 02 Pic Sarah - GoualDocument11 pagesTP 02 Pic Sarah - GoualSa RahPas encore d'évaluation
- LubrificationDocument9 pagesLubrificationNeoXana01Pas encore d'évaluation
- Ciments Et Céramiques Et VerresDocument33 pagesCiments Et Céramiques Et VerresAnass AkrimPas encore d'évaluation
- Chapitre I Classification Des MatériauxDocument2 pagesChapitre I Classification Des MatériauxZack LapPas encore d'évaluation
- Diode Photovoltaique - ProjectionDocument109 pagesDiode Photovoltaique - ProjectionredwanePas encore d'évaluation