Vous aimerez peut-être aussi
- Cours 4 Barres - 11Document11 pagesCours 4 Barres - 11kader100% (1)
- Théorie Des MécanismesDocument5 pagesThéorie Des MécanismesMohamed Slim KhPas encore d'évaluation
- Poly Théorie Des MécanismesDocument24 pagesPoly Théorie Des MécanismesJaksMaksPas encore d'évaluation
- Exercices d'intégrales de lignes, de surfaces et de volumesD'EverandExercices d'intégrales de lignes, de surfaces et de volumesPas encore d'évaluation
- Moulage Par Injection PlastiqueDocument13 pagesMoulage Par Injection PlastiqueismailPas encore d'évaluation
- Eli Dictionnaire Illustré FrançaisDocument99 pagesEli Dictionnaire Illustré Françaisarouz_m2078100% (5)
- ANALYSE de MécanismeDocument53 pagesANALYSE de MécanismeAchref Sallami100% (1)
- Automatismes Industriels 2 Eme Annee Gen PDFDocument47 pagesAutomatismes Industriels 2 Eme Annee Gen PDFAmmar BahijPas encore d'évaluation
- Theorie Des Mecanismes-CoursDocument14 pagesTheorie Des Mecanismes-CoursAli ArroudjPas encore d'évaluation
- 1-Modelisation Et Parametrage Des Mecanismes - Assemble - OdtDocument12 pages1-Modelisation Et Parametrage Des Mecanismes - Assemble - Odtyassinebouazzi100% (1)
- Scie Circulaire A Format FelderDocument7 pagesScie Circulaire A Format Felderapi-489017636Pas encore d'évaluation
- Chapitre 4Document35 pagesChapitre 4CHiZORI 19Pas encore d'évaluation
- Modélisation Cinématique Des MécanismesDocument8 pagesModélisation Cinématique Des MécanismesmounirgemPas encore d'évaluation
- 69 - DPGF12Document60 pages69 - DPGF12chihebamara22Pas encore d'évaluation
- Liaisons Mã©caniques Et Schã©ma Cinã©matiqueDocument32 pagesLiaisons Mã©caniques Et Schã©ma Cinã©matiqueMohamedPas encore d'évaluation
- 1-Le Schéma Cinématique Des MécanismesDocument8 pages1-Le Schéma Cinématique Des MécanismesSegaAlainCoulibalyPas encore d'évaluation
- Cours MicrDocument30 pagesCours MicrDOUNIAPas encore d'évaluation
- Jet D'eau MDFDocument7 pagesJet D'eau MDFNathaniel Nerquaye-tetteh86% (14)
- Modelisation CinematiqueDocument16 pagesModelisation CinematiqueAnonymous tNIpOVPyPas encore d'évaluation
- DT 94 Guide Reservoirs de StockageDocument92 pagesDT 94 Guide Reservoirs de StockageMadidj_2014Pas encore d'évaluation
- 2 HyperstatismeDocument9 pages2 HyperstatismeMaha HammamiPas encore d'évaluation
- Théorie de Mécanisme 1Document15 pagesThéorie de Mécanisme 1hamzaPas encore d'évaluation
- 2 Chapitre2 Modelisation Des MécanismesDocument9 pages2 Chapitre2 Modelisation Des Mécanismesmohammed belhadj kelkal100% (1)
- LIAISONS Et Schematisation Et TorseursDocument16 pagesLIAISONS Et Schematisation Et TorseursHassanbfk BfkPas encore d'évaluation
- La Théorie Des MécanismesDocument13 pagesLa Théorie Des MécanismesMohamed Ali ElouaerPas encore d'évaluation
- Chapitre 1-Preliminaire Et Rappel1Document7 pagesChapitre 1-Preliminaire Et Rappel1BahazPas encore d'évaluation
- Chapitre 2Document10 pagesChapitre 2skaachPas encore d'évaluation
- Schématisation Des MécanismesDocument13 pagesSchématisation Des MécanismesImad AznagPas encore d'évaluation
- Chaines Des SolidesDocument9 pagesChaines Des SolidesFree FirePas encore d'évaluation
- Resumé Cours MITPDocument13 pagesResumé Cours MITPMahdi BensalemPas encore d'évaluation
- Liaisons CinématiquesDocument7 pagesLiaisons Cinématiquesildjs.bjrfgPas encore d'évaluation
- Chapitre I Les Fonctions Mécaniques Élémentaires: 1. La LiaisonDocument18 pagesChapitre I Les Fonctions Mécaniques Élémentaires: 1. La Liaisonhello youPas encore d'évaluation
- COURS Conception Systeme MécaniqueDocument22 pagesCOURS Conception Systeme MécaniqueAymen KhalfaouiPas encore d'évaluation
- CoursDocument61 pagesCoursBen Aissa ChokriPas encore d'évaluation
- COURS Théorie Des MécanismesDocument65 pagesCOURS Théorie Des MécanismesChristian DinhoPas encore d'évaluation
- 03 A - Modélisation Des Liaisons 2Document7 pages03 A - Modélisation Des Liaisons 2Keziah MustunPas encore d'évaluation
- Fiche de TD Comportement Dynamique 2023++Document18 pagesFiche de TD Comportement Dynamique 2023++E-skills CorporationPas encore d'évaluation
- 01_GMtc1_Cours_Partie1_Chap1_PoquetDocument41 pages01_GMtc1_Cours_Partie1_Chap1_PoquetRoberta Jaques BauerPas encore d'évaluation
- Chapitre 1Document6 pagesChapitre 1ademtalbi554Pas encore d'évaluation
- CH 5 Cours Modélisation Des MécanismesDocument15 pagesCH 5 Cours Modélisation Des Mécanismesaicha.azddinePas encore d'évaluation
- Schéma CinématiqueDocument48 pagesSchéma CinématiqueomatrPas encore d'évaluation
- Cours Modèl Liaison AjustementsDocument70 pagesCours Modèl Liaison AjustementssawadogoPas encore d'évaluation
- Schéma CinématiqueDocument3 pagesSchéma CinématiquefakherPas encore d'évaluation
- Construction MécaniqueDocument250 pagesConstruction MécaniqueSimo MabrouukPas encore d'évaluation
- Schematisation MecanismesDocument23 pagesSchematisation MecanismesInteg StiPas encore d'évaluation
- VI Chaine FerméeDocument2 pagesVI Chaine FerméeMohamed JouiniPas encore d'évaluation
- Technologie Construction2Document34 pagesTechnologie Construction2Ben Aissa Chokri100% (1)
- Conception Mécanique - Analyse Structurelle CMDocument22 pagesConception Mécanique - Analyse Structurelle CMsie Rachid TraorePas encore d'évaluation
- Commande SMA 2012-2013Document35 pagesCommande SMA 2012-2013Youcef DjeririPas encore d'évaluation
- Schematisation Des Systemes - SCM Et Liaison TSI1Document18 pagesSchematisation Des Systemes - SCM Et Liaison TSI1Fakhreddine NaimiPas encore d'évaluation
- Chap3 Hyperstatisme Et Mobilité Des MécanismesDocument21 pagesChap3 Hyperstatisme Et Mobilité Des Mécanismesmamadou diopPas encore d'évaluation
- Chapitre 2Document7 pagesChapitre 2yousfi jeziaPas encore d'évaluation
- Chapitre 2 PDFDocument4 pagesChapitre 2 PDFYasser NapoliPas encore d'évaluation
- Modélisation Géométrique de LiaisonsDocument37 pagesModélisation Géométrique de LiaisonsAyoüb Sou UadPas encore d'évaluation
- Théorie de MécanismesDocument11 pagesThéorie de MécanismesMetrach AbdrazakPas encore d'évaluation
- Analyse Structurale Des MécanismesDocument13 pagesAnalyse Structurale Des MécanismesSalomon S. HoungbedjiPas encore d'évaluation
- CAM - Rappel Sur Les Liaisons Mécaniques 1Document20 pagesCAM - Rappel Sur Les Liaisons Mécaniques 1Moslem ZariatPas encore d'évaluation
- Cours Theorie Des MecanismesDocument5 pagesCours Theorie Des MecanismessemahPas encore d'évaluation
- Graphe de Fluence Des SignauxDocument7 pagesGraphe de Fluence Des SignauxSab RinaPas encore d'évaluation
- CFAO (1) Modelisation GeometriqeDocument8 pagesCFAO (1) Modelisation Geometriqebakkali_bilalPas encore d'évaluation
- Théorie Des Mécanismes - IntroductionDocument51 pagesThéorie Des Mécanismes - IntroductionEasy Online ServicesPas encore d'évaluation
- Si Co08 MMC EfDocument21 pagesSi Co08 MMC EfBrahim AchayfadPas encore d'évaluation
- Chapitre 1,1Document30 pagesChapitre 1,1mezyan reggaiPas encore d'évaluation
- Delmia-Robotics 1290075410 PDFDocument2 pagesDelmia-Robotics 1290075410 PDFismailPas encore d'évaluation
- Amelioration de La Production - Soukaina SADIK - 4227Document112 pagesAmelioration de La Production - Soukaina SADIK - 4227ismailPas encore d'évaluation
- Transmission de MouvementDocument10 pagesTransmission de MouvementismailPas encore d'évaluation
- 1 ConvoyeurDocument24 pages1 ConvoyeurismailPas encore d'évaluation
- Habrial Catalogue 2017 Stockage RayonnageDocument23 pagesHabrial Catalogue 2017 Stockage RayonnageismailPas encore d'évaluation
- Le SYSTèMe MODULAIRe POUR Le STOCKAGe FIFO Et LIFO PDFDocument16 pagesLe SYSTèMe MODULAIRe POUR Le STOCKAGe FIFO Et LIFO PDFismailPas encore d'évaluation
- Student WB 2011 FRADocument12 pagesStudent WB 2011 FRAismailPas encore d'évaluation
- Exemple TD T MDocument7 pagesExemple TD T MismailPas encore d'évaluation
- Tp1 Initiation Sur Automation StudioDocument9 pagesTp1 Initiation Sur Automation StudioismailPas encore d'évaluation
- Polution ThermiqueDocument10 pagesPolution ThermiqueismailPas encore d'évaluation
- HS PDFDocument28 pagesHS PDFRazack SawadogoPas encore d'évaluation
- 08 TrioMotion France 1609Document17 pages08 TrioMotion France 1609Khaled OuniPas encore d'évaluation
- Varangue Collection 2022 DEFDocument151 pagesVarangue Collection 2022 DEFPedro Daniel CoronelPas encore d'évaluation
- Les Composants PneumatiquesDocument13 pagesLes Composants Pneumatiquesjilani100% (1)
- Avis Technique Mur TOT'MDocument42 pagesAvis Technique Mur TOT'MYuri BenchkriPas encore d'évaluation
- DS Sky WorldDocument2 pagesDS Sky WorldGodwinPas encore d'évaluation
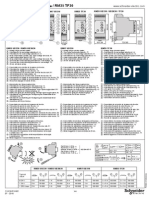
- RM35Document4 pagesRM35zarun1Pas encore d'évaluation
- Les Différents Types de DallageDocument7 pagesLes Différents Types de DallageLOUPas encore d'évaluation
- Parc de MK Au 25 Octobre 2019Document14 pagesParc de MK Au 25 Octobre 2019yaya hienPas encore d'évaluation
- Designation 1Document1 pageDesignation 1Mustapha elmoudenPas encore d'évaluation
- Diagramme D'ellinghamDocument2 pagesDiagramme D'ellinghammaino100% (2)
- Calcul Des Poutres: Poutre Principale 1Document13 pagesCalcul Des Poutres: Poutre Principale 1Nouhaila MalkiPas encore d'évaluation
- Projet FlowsheetDocument10 pagesProjet FlowsheetElyvić KapendPas encore d'évaluation
- Hese de Doctorat De: Shawki MAZLOUMDocument277 pagesHese de Doctorat De: Shawki MAZLOUMrgfePas encore d'évaluation
- Projet 3 Plan Ascensur Et DetailDocument1 pageProjet 3 Plan Ascensur Et DetailMEPas encore d'évaluation
- Rapport Annuel Sur La Gestion Des Déchets Dans La CUS (2010)Document36 pagesRapport Annuel Sur La Gestion Des Déchets Dans La CUS (2010)Rue89 StrasbourgPas encore d'évaluation