
Vous aimerez peut-être aussi
- Variateurs de Vitesse - MAS2Document10 pagesVariateurs de Vitesse - MAS2Fotcha EricPas encore d'évaluation
- Sur Chaque Impédance Retrouvez Ce Comportement.: Exercice 1Document2 pagesSur Chaque Impédance Retrouvez Ce Comportement.: Exercice 1Mossafir Mossafir100% (1)
- Grafcet Manutention PDFDocument2 pagesGrafcet Manutention PDFMohamed ElmahdiPas encore d'évaluation
- Epreuve D'electronique Pour Electrotechnicien 1Document4 pagesEpreuve D'electronique Pour Electrotechnicien 1Patrick Steve Simo100% (2)
- TDDocument2 pagesTDHamid BendjelloulPas encore d'évaluation
- 3 Compteur Synchrone 2011 2012Document8 pages3 Compteur Synchrone 2011 2012Mohamed EL MASSOUDIPas encore d'évaluation
- Série 11Document15 pagesSérie 11Aya IrmaPas encore d'évaluation
- Contre ReactionDocument18 pagesContre ReactionMohammad HassounPas encore d'évaluation
- Rapport de TP MicrocontrôleurDocument13 pagesRapport de TP MicrocontrôleurKhalloukiElMahdiPas encore d'évaluation
- TSX21Document5 pagesTSX21Leroy Lionel Sonfack100% (2)
- Exo MultivibrateurDocument1 pageExo MultivibrateurFiras Ksontini100% (2)
- Iut MC Et2 TDDocument54 pagesIut MC Et2 TDjeremy Burlet0% (1)
- Cours de Moteur Asynchrone ParDocument13 pagesCours de Moteur Asynchrone ParAyoub Laouad100% (1)
- Exercice2 Capteur PDFDocument8 pagesExercice2 Capteur PDFTunENSTABPas encore d'évaluation
- Bascules SynchronesDocument7 pagesBascules SynchronesMohamed Ben FredjPas encore d'évaluation
- Etude Composant Depart Moteur DRDocument15 pagesEtude Composant Depart Moteur DRDjamal Zenaidi100% (1)
- Cours MCCDocument12 pagesCours MCChouss11100% (4)
- TD Transformée en ZDocument20 pagesTD Transformée en ZamaniPas encore d'évaluation
- Automate 1111Document8 pagesAutomate 1111Yassine LazragPas encore d'évaluation
- TDDocument10 pagesTDredPas encore d'évaluation
- Monostable AstableDocument7 pagesMonostable Astablekonan franckPas encore d'évaluation
- Rapport Des Trois Projets-1-ConvertiDocument16 pagesRapport Des Trois Projets-1-ConvertiAnonymous oNUTOePwPas encore d'évaluation
- Upload - Série D'exercices N°3-4tech-GRAFCET-2014-2015-CorrectionDocument2 pagesUpload - Série D'exercices N°3-4tech-GRAFCET-2014-2015-CorrectionRania Ben HassinePas encore d'évaluation
- Presentation Vesta V47-660 KWDocument10 pagesPresentation Vesta V47-660 KWLahouari FatahPas encore d'évaluation
- Electronique de Puissance Seq 4Document3 pagesElectronique de Puissance Seq 4Tc NgPas encore d'évaluation
- Amplificateur OperationnelDocument7 pagesAmplificateur OperationnelMarwa BanaouazPas encore d'évaluation
- DM - Logique CombinatoireDocument3 pagesDM - Logique Combinatoirereda100% (1)
- Serie #2 Système TriphaséDocument5 pagesSerie #2 Système TriphaséSaid OujjaPas encore d'évaluation
- 2 Intro Langage LadderDocument6 pages2 Intro Langage LadderharoldPas encore d'évaluation
- Système Automatique de Pompage Avec ArduinoDocument32 pagesSystème Automatique de Pompage Avec ArduinobenjarrayPas encore d'évaluation
- Upload - Série D'exercices N°4-3tech-Bascules-2013-2014-CorrectionDocument5 pagesUpload - Série D'exercices N°4-3tech-Bascules-2013-2014-CorrectionchediPas encore d'évaluation
- TD2 CombinatoireDocument15 pagesTD2 Combinatoirebilal elazzouziPas encore d'évaluation
- Remplissage de CuvesDocument3 pagesRemplissage de Cuvesmaria pianaPas encore d'évaluation
- F Choix D'un ContacteurDocument3 pagesF Choix D'un ContacteurYacine MarichePas encore d'évaluation
- Poly TD SAPDocument18 pagesPoly TD SAPOussama BeddaPas encore d'évaluation
- LM335Document8 pagesLM335AmineMohamed0% (1)
- Zelio Sur Douille 35 104Document70 pagesZelio Sur Douille 35 104moplkiPas encore d'évaluation
- Aii FF TheorieDocument5 pagesAii FF Theoriewisam100% (1)
- Cours Ampli OpDocument6 pagesCours Ampli OpRafik OuchenePas encore d'évaluation
- API - Cours RésuméDocument32 pagesAPI - Cours RésuméalmahfoudelfadiliPas encore d'évaluation
- Capteurs ExercicesDocument1 pageCapteurs Exercicesالمثقف الصغير100% (1)
- Enn TD 05 06Document1 pageEnn TD 05 06silent kPas encore d'évaluation
- TD2 - Grafcet - Mise en Équations - MatérialisationDocument4 pagesTD2 - Grafcet - Mise en Équations - Matérialisationfakhfakh100% (1)
- DS N°1 Atc 2steDocument6 pagesDS N°1 Atc 2steMustapha Semmaa67% (3)
- 1 Fonctions. 1.2 Réalisation D Une Alimentation Stabilisée. Fonction de L ÉlectroniqueDocument5 pages1 Fonctions. 1.2 Réalisation D Une Alimentation Stabilisée. Fonction de L ÉlectroniqueMedySmartPas encore d'évaluation
- Machine AsynchroneDocument5 pagesMachine AsynchronemidoPas encore d'évaluation
- TPETIDocument10 pagesTPETISam DikoPas encore d'évaluation
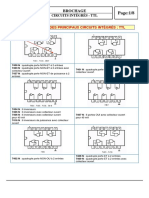
- Brochage Des Principaux CI-TTL PDFDocument8 pagesBrochage Des Principaux CI-TTL PDFFerjani Mohamed100% (1)
- TP Ao PDFDocument7 pagesTP Ao PDFrayane laouichiPas encore d'évaluation
- TP3 VCS AcDocument6 pagesTP3 VCS AcKaneki KenPas encore d'évaluation
- L'Électricité - Découvreurs et Inventeurs: Tome IVD'EverandL'Électricité - Découvreurs et Inventeurs: Tome IVÉvaluation : 3 sur 5 étoiles3/5 (2)
- Récupération D'Énergie: Transformer l'énergie ambiante présente dans l'environnement en énergie électriqueD'EverandRécupération D'Énergie: Transformer l'énergie ambiante présente dans l'environnement en énergie électriquePas encore d'évaluation
- L'électricité - Découvreurs et Inventeurs: Tome IID'EverandL'électricité - Découvreurs et Inventeurs: Tome IIÉvaluation : 5 sur 5 étoiles5/5 (1)
- Transformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiqueD'EverandTransformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiquePas encore d'évaluation
- L' Injection électronique: Tutoriel et GuideD'EverandL' Injection électronique: Tutoriel et GuideÉvaluation : 5 sur 5 étoiles5/5 (1)
- Pédagogie Et Infos MinedubDocument1 pagePédagogie Et Infos MinedubmauricetappaPas encore d'évaluation
- Le Salut Est en Jésus-Christ.: Enfants Du ParadisDocument2 pagesLe Salut Est en Jésus-Christ.: Enfants Du ParadismauricetappaPas encore d'évaluation
- Les API - Genie - Electriques PDFDocument12 pagesLes API - Genie - Electriques PDFmauricetappaPas encore d'évaluation
- Elevage Et Agricultures Au CamerounDocument4 pagesElevage Et Agricultures Au CamerounmauricetappaPas encore d'évaluation
- Controled Es Compos Ants Beny ArouDocument13 pagesControled Es Compos Ants Beny AroumauricetappaPas encore d'évaluation
- Electronique de Puissance Avancee PDFDocument42 pagesElectronique de Puissance Avancee PDFSidahmed Larbaoui75% (16)
- ContinuDocument0 pageContinuAhmed HA100% (1)
- Magoe Cours Electronic 01Document96 pagesMagoe Cours Electronic 01mauricetappaPas encore d'évaluation
- Technologie OrdinateurDocument1 pageTechnologie OrdinateurmauricetappaPas encore d'évaluation
- m2102 Autom Fascicule TD PDFDocument39 pagesm2102 Autom Fascicule TD PDFEL Mansour BrahimPas encore d'évaluation
- Tech Ordinateurs ReseauxDocument554 pagesTech Ordinateurs ReseauxAbdallah Toolmaker100% (4)
- Electronique-Analogique Simple PDFDocument199 pagesElectronique-Analogique Simple PDFmauricetappaPas encore d'évaluation
- Initiation Simulation AnalogiqueDocument6 pagesInitiation Simulation AnalogiqueAzer RezaPas encore d'évaluation
- Matière Electronique Systèmes PDFDocument71 pagesMatière Electronique Systèmes PDFYassine BelhmerPas encore d'évaluation
- ITEEM1 02 MCC PDFDocument24 pagesITEEM1 02 MCC PDFYesmaRofiaPas encore d'évaluation
- 2360e FR PDFDocument60 pages2360e FR PDFmauricetappaPas encore d'évaluation
- Matière Electronique Systèmes PDFDocument71 pagesMatière Electronique Systèmes PDFYassine BelhmerPas encore d'évaluation
- Schémaplic Client 7.5.1068.0Document8 pagesSchémaplic Client 7.5.1068.0SalahdocPas encore d'évaluation
- Machine - DC MoteurDocument37 pagesMachine - DC MoteuraimanPas encore d'évaluation
- Schémaplic Client 7.5.1068.0Document106 pagesSchémaplic Client 7.5.1068.0mauricetappa83% (6)
- Api ProfDocument12 pagesApi ProfZaki Ait LahssainePas encore d'évaluation
- Prototypage Rapide A Base de FPGA PDFDocument174 pagesPrototypage Rapide A Base de FPGA PDFmauricetappaPas encore d'évaluation
- TPMACHINES1 Electrotechnique 1 TPDocument45 pagesTPMACHINES1 Electrotechnique 1 TPmauricetappaPas encore d'évaluation
- TDS TD Corrections PDFDocument33 pagesTDS TD Corrections PDFSaad SebPas encore d'évaluation
- Efficacite Energetique Electronique PuissanceDocument24 pagesEfficacite Energetique Electronique PuissancemauricetappaPas encore d'évaluation
- Schémaplic Client-7.5.1068.0 PDFDocument10 pagesSchémaplic Client-7.5.1068.0 PDFmauricetappaPas encore d'évaluation
- Cours1 PDFDocument44 pagesCours1 PDFmauricetappaPas encore d'évaluation
- VHDL - FpgaDocument29 pagesVHDL - Fpgamn13hhPas encore d'évaluation
- Master IGDocument168 pagesMaster IGmauricetappaPas encore d'évaluation
- Le Passage Du Résultat Comptable Au Résultat FiscalDocument138 pagesLe Passage Du Résultat Comptable Au Résultat Fiscalabouyoucef ABBAD100% (2)
- Grève de La SNAVDocument27 pagesGrève de La SNAV68ardenPas encore d'évaluation
- 04 Sigma Binome ChapitreDocument29 pages04 Sigma Binome ChapitrefbdbhdPas encore d'évaluation
- Reactualisation Etudes Impact Block CI PDFDocument252 pagesReactualisation Etudes Impact Block CI PDFAdikoDenzeyAnonhPas encore d'évaluation
- Expresiones Coloquiales en FrancésDocument5 pagesExpresiones Coloquiales en FrancésPaul DaugentePas encore d'évaluation
- Administrateur Système & ApplicationDocument2 pagesAdministrateur Système & Applicationfokom talom gaetanPas encore d'évaluation
- 604 S - Eléments de Technologie CAT PDFDocument61 pages604 S - Eléments de Technologie CAT PDFHugo Tia100% (4)
- Livre PDFDocument166 pagesLivre PDFviviana100% (7)
- TP Final InitiationDocument10 pagesTP Final InitiationAgape LwanzoPas encore d'évaluation
- Cei FRDocument2 pagesCei FRelmoummyPas encore d'évaluation
- Đáp Án (Answer Key) Cuốn ETS 2019Document14 pagesĐáp Án (Answer Key) Cuốn ETS 2019Pham NguyenPas encore d'évaluation
- BclogoDocument31 pagesBclogonour1960Pas encore d'évaluation
- Cours MateriauxDocument6 pagesCours Materiauxbeey2001Pas encore d'évaluation
- Ressources Formation PowerShell Niveau InitiationDocument89 pagesRessources Formation PowerShell Niveau InitiationHenri HemlePas encore d'évaluation
- Propriétés Et Appropriation Des Lectures Numériques Au Sein Du Medium TabletteDocument98 pagesPropriétés Et Appropriation Des Lectures Numériques Au Sein Du Medium TabletteNoamNorkhat100% (1)
- Lexique - Les Nouvelles TechnologiesDocument3 pagesLexique - Les Nouvelles Technologiesmaria jesusPas encore d'évaluation
- Reussir Pas A Pas Dans LongrichDocument17 pagesReussir Pas A Pas Dans LongrichAbdoulaye OlaoyePas encore d'évaluation
- Duo Pour Piano Et GuitareDocument4 pagesDuo Pour Piano Et Guitarecamilo sanabriaPas encore d'évaluation
- H.248 Protocol FRDocument51 pagesH.248 Protocol FRAbdelilah Charboub100% (1)
- CelluloseDocument36 pagesCelluloseYussef Daniel MontplaisirPas encore d'évaluation
- Management DES ORGANISATIONS PubliquesDocument42 pagesManagement DES ORGANISATIONS PubliquesRandom AccountPas encore d'évaluation
- (1905) Grammaire Annamite À L'usage Des Français de L'annam Et Du Tonkin - P. VallotDocument262 pages(1905) Grammaire Annamite À L'usage Des Français de L'annam Et Du Tonkin - P. Vallotnvh92Pas encore d'évaluation
- Facteurs Dinfluences ExternesDocument2 pagesFacteurs Dinfluences ExternesJean-Luc BastinPas encore d'évaluation
- QCMS EntrainementDocument13 pagesQCMS EntrainementEchafaiPas encore d'évaluation
- Communique Officiel Punaise de LitDocument2 pagesCommunique Officiel Punaise de LitMohamed InnekidenePas encore d'évaluation
- OrangeMoney Terms FRDocument26 pagesOrangeMoney Terms FRMVOGO FabienPas encore d'évaluation
- Recommandations Professionnelles Pour La Manutention en Sécurité Des Éléments Architecturaux 178P Octobre2008Document57 pagesRecommandations Professionnelles Pour La Manutention en Sécurité Des Éléments Architecturaux 178P Octobre2008Sénant Jean-MarcPas encore d'évaluation
- 2021 2022 V1 Applications1 Elements Finis J GasparouxDocument7 pages2021 2022 V1 Applications1 Elements Finis J GasparouxNawel23 MLKPas encore d'évaluation
- Plan de Ferraillage TablierDocument1 pagePlan de Ferraillage TablierFiras KorPas encore d'évaluation


















































![Technologies Émergentes En Électronique [French]](https://imgv2-1-f.scribdassets.com/img/series/590453133/149x198/c3f0e87400/1713535087?v=1)































































