Vous aimerez peut-être aussi
- TP 2Document4 pagesTP 2zakariaPas encore d'évaluation
- Resume Travaux These VM 2Document9 pagesResume Travaux These VM 2Vincent MorioPas encore d'évaluation
- TD2 Corrigé (Rég GTE 1A)Document7 pagesTD2 Corrigé (Rég GTE 1A)mohamed creatorPas encore d'évaluation
- Cours Automatique Linéaire Séance 1Document68 pagesCours Automatique Linéaire Séance 1Mohammed BenlamlihPas encore d'évaluation
- Automatique Linéaire Continue Exercices 02Document25 pagesAutomatique Linéaire Continue Exercices 02Ayoub BoussairiPas encore d'évaluation
- CharaDamya AricheKarimaDocument61 pagesCharaDamya AricheKarimamezianePas encore d'évaluation
- 2a Tis Robotique Slides PDFDocument213 pages2a Tis Robotique Slides PDFSouhaib LoudaPas encore d'évaluation
- Disponibilite ApplicationDocument4 pagesDisponibilite ApplicationKhmira WafaPas encore d'évaluation
- Gangloff Robotique Slides 1 Chapitre 1Document44 pagesGangloff Robotique Slides 1 Chapitre 1Rachida Jaziri Ep MahouachiPas encore d'évaluation
- Elec Benderradji Hadda PDFDocument132 pagesElec Benderradji Hadda PDFHattab AbdellilahPas encore d'évaluation
- Fac-T-LMD-M-Master Aautomatique Des SystèmesDocument29 pagesFac-T-LMD-M-Master Aautomatique Des SystèmesBentchikou MohPas encore d'évaluation
- Exer Cori TP Info3 L2Document4 pagesExer Cori TP Info3 L2kheris salihaPas encore d'évaluation
- Recueil Exercices 075 PDFDocument45 pagesRecueil Exercices 075 PDFTheo WanPas encore d'évaluation
- Matlab Corrige PDFDocument4 pagesMatlab Corrige PDFIvana KenfackPas encore d'évaluation
- Robotique Ch4 PDFDocument35 pagesRobotique Ch4 PDFDoaa RachdiPas encore d'évaluation
- Robots MobileDocument30 pagesRobots MobileLarbi ElbakkaliPas encore d'évaluation
- Devoir Surveillé D'automatique-Formation Agrégative en Génie MécaniqueDocument8 pagesDevoir Surveillé D'automatique-Formation Agrégative en Génie MécaniqueKhmira WafaPas encore d'évaluation
- Bia 2001Document18 pagesBia 2001Cédric SorghoPas encore d'évaluation
- Cours Automatique Linéaire Séance 1Document17 pagesCours Automatique Linéaire Séance 1fakehiPas encore d'évaluation
- Modélisation Des Systèmes Linéaires Avec MatlabDocument4 pagesModélisation Des Systèmes Linéaires Avec MatlabMustapha El MetouiPas encore d'évaluation
- Chapitre 4.2Document15 pagesChapitre 4.2Med Tiouale100% (1)
- Cinematique Des Robots Series PDFDocument49 pagesCinematique Des Robots Series PDFUche UrchPas encore d'évaluation
- Modèle Cinématique DirectDocument7 pagesModèle Cinématique DirectsiamPas encore d'évaluation
- Chal1 M03 G13Document10 pagesChal1 M03 G13Fakam TatianaPas encore d'évaluation
- TP1Document7 pagesTP1Ba ChirPas encore d'évaluation
- Tp3commande - CopieDocument7 pagesTp3commande - CopieSadaoui SafaaPas encore d'évaluation
- MIDOUDocument7 pagesMIDOUmidou chPas encore d'évaluation
- TP 02 Systémes AsservisDocument12 pagesTP 02 Systémes AsservisAMAR amarPas encore d'évaluation
- TD MagnetismeDocument5 pagesTD MagnetismeRazak SeonePas encore d'évaluation
- La Flection RDM TP 4Document7 pagesLa Flection RDM TP 4ahmed ahmadPas encore d'évaluation
- Exercice - Jaugeage Au MoulinetDocument3 pagesExercice - Jaugeage Au Moulinetmohammed8nizar100% (2)
- Interrogation Écrite N°3 G2 - 4Document3 pagesInterrogation Écrite N°3 G2 - 4لونيس نور الإسلامPas encore d'évaluation
- Information: FeuilleDocument13 pagesInformation: FeuilleAmine HamikPas encore d'évaluation
- compt rendu TP PVDocument33 pagescompt rendu TP PVChady LahbibPas encore d'évaluation
- Exercice0701 CorrigeDocument12 pagesExercice0701 CorrigeparisPas encore d'évaluation
- Laboratorul 3 Biela Manivela 8Document2 pagesLaboratorul 3 Biela Manivela 8Adrian TodeaPas encore d'évaluation
- Bom 3 AzeDocument16 pagesBom 3 Azeabdelhadi amalPas encore d'évaluation
- tp solide 2Document8 pagestp solide 2Heramza RayanePas encore d'évaluation
- tp3 SapsDocument13 pagestp3 SapsAhlem OuatasPas encore d'évaluation
- Exercice - Jaugeage Au MoulinetDocument3 pagesExercice - Jaugeage Au Moulinetلونيس نور الإسلام100% (3)
- Mini Projet Beton Pont PrecontrainteDocument13 pagesMini Projet Beton Pont Precontraintejihad1568Pas encore d'évaluation
- Etude Des PoutresDocument7 pagesEtude Des PoutresZaki ZaidiPas encore d'évaluation
- TP 01: MCC: Réalise ParDocument17 pagesTP 01: MCC: Réalise ParDjimli DjasserPas encore d'évaluation
- 40te Terex Ac40 2lDocument4 pages40te Terex Ac40 2lPaizinho Imms GomezPas encore d'évaluation
- ProductionDocument10 pagesProductionIkram KhalfalliPas encore d'évaluation
- DanielaDocument2 pagesDanielaCamilo AntePas encore d'évaluation
- Proj MedROE V UHFDocument6 pagesProj MedROE V UHFElmo Dutra FilhoPas encore d'évaluation
- Radiocristallographie TP3Document5 pagesRadiocristallographie TP3يا سينPas encore d'évaluation
- Retour: NB: Les Formules de Cette Feuille Étant Protégées, Vous Ne Pouvez Jouer Que Sur Les Colonnes A, B Et CDocument2 pagesRetour: NB: Les Formules de Cette Feuille Étant Protégées, Vous Ne Pouvez Jouer Que Sur Les Colonnes A, B Et CMou BenPas encore d'évaluation
- BR 5Document38 pagesBR 5drissamohamedfanePas encore d'évaluation
- Module 2: L'analyse en Composantes Principales - Exercices PréparatifsDocument17 pagesModule 2: L'analyse en Composantes Principales - Exercices Préparatifsمريم الإسبانيهPas encore d'évaluation
- Variance Bloc PDFDocument41 pagesVariance Bloc PDFtikrouminePas encore d'évaluation
- Mini Projet Mimoun BPELDocument9 pagesMini Projet Mimoun BPELjihad1568Pas encore d'évaluation
- Corrigé Type Controle de Surface 2023Document2 pagesCorrigé Type Controle de Surface 2023Olivia DaPas encore d'évaluation
- TP 7 - Cinematique Du Mouvement RectiligneDocument4 pagesTP 7 - Cinematique Du Mouvement Rectilignemeriemkroubi2004Pas encore d'évaluation
- TP Automatique LaiiDocument31 pagesTP Automatique Laiiharoun tarifaPas encore d'évaluation
- Informe FisicaDocument4 pagesInforme Fisicagraciapaco92Pas encore d'évaluation
- tp2 ConvertiDocument6 pagestp2 Convertisatima omPas encore d'évaluation
- RC DECEMBRE 2017 CorrigéDocument8 pagesRC DECEMBRE 2017 Corrigéyassinechouchene91Pas encore d'évaluation
- KadijaDocument6 pagesKadijaHANANE WAAZIZPas encore d'évaluation
- Abdennour BENNAMIADocument1 pageAbdennour BENNAMIAMeryem MimiPas encore d'évaluation
- Appdesigner Dans MatlabDocument3 pagesAppdesigner Dans MatlabMeryem MimiPas encore d'évaluation
- CondensateurDocument4 pagesCondensateurMeryem MimiPas encore d'évaluation
- Formulaires Fonctions Usuelles, Dérivées, PrimitivesDocument3 pagesFormulaires Fonctions Usuelles, Dérivées, PrimitivesserialaminePas encore d'évaluation
- TP AsservismentDocument6 pagesTP AsservismentMeryem MimiPas encore d'évaluation
- Travaille de Della PDFDocument8 pagesTravaille de Della PDFMeryem MimiPas encore d'évaluation
- Memoire Finale KaddourDocument75 pagesMemoire Finale KaddourMeryem MimiPas encore d'évaluation
- Page de Garde MasterDocument1 pagePage de Garde MasterMeryem MimiPas encore d'évaluation
- Travaille de MR Della PDFDocument8 pagesTravaille de MR Della PDFMeryem MimiPas encore d'évaluation
- Mémoire: de Fin D'etudesDocument70 pagesMémoire: de Fin D'etudesMeryem MimiPas encore d'évaluation
- TP Robotique TP4Document3 pagesTP Robotique TP4Meryem MimiPas encore d'évaluation
- TP4 Comm EffortDocument8 pagesTP4 Comm EffortAzeddine DemPas encore d'évaluation
- These Makhloufi Fateh PDFDocument175 pagesThese Makhloufi Fateh PDFMeryem MimiPas encore d'évaluation
- PDFDocument209 pagesPDFMeryem MimiPas encore d'évaluation
- Bourhail Zakaria PDFDocument54 pagesBourhail Zakaria PDFKhalil HsainePas encore d'évaluation
- TD - 1-8 CorrigéDocument2 pagesTD - 1-8 CorrigéJaouad DiouriPas encore d'évaluation
- Compte Rundu GyroscopeDocument7 pagesCompte Rundu GyroscopeHicham01100% (2)
- DL 1 Spe MP Rs Oct.22Document8 pagesDL 1 Spe MP Rs Oct.22Ibrahim OmraniPas encore d'évaluation
- 1S2TDP12013BISDocument3 pages1S2TDP12013BISssg100% (1)
- Untitled 1Document2 pagesUntitled 1zhiwaPas encore d'évaluation
- 4-Récapitulatif Armatures de PoutresDocument9 pages4-Récapitulatif Armatures de PoutresAmine AstingPas encore d'évaluation
- DYN-ENER07 Sujet - Equilibrer Un Solide en Rotation Autour D'un Axe FixeDocument10 pagesDYN-ENER07 Sujet - Equilibrer Un Solide en Rotation Autour D'un Axe FixeseddikmorabetPas encore d'évaluation
- Différents Mouvements D'un Disque 2Document8 pagesDifférents Mouvements D'un Disque 2Ingenieur EnsaPas encore d'évaluation
- CI4 TD33-Centrifugeuse PDFDocument1 pageCI4 TD33-Centrifugeuse PDFOthmane TouilPas encore d'évaluation
- La Détermination Expérimentale Du Moment D'inertie D'un Modèle Réduit D'avionDocument17 pagesLa Détermination Expérimentale Du Moment D'inertie D'un Modèle Réduit D'avionMent MoulayPas encore d'évaluation
- Chap3-Caractéristiques GéométriquesDocument18 pagesChap3-Caractéristiques GéométriquesMiSs MåissaPas encore d'évaluation
- TD1 Machines TournantesDocument4 pagesTD1 Machines TournantesMeddour Belkacem67% (6)
- Modelisation Des Actions MecaniquesDocument12 pagesModelisation Des Actions MecaniquesFranckGochedePas encore d'évaluation
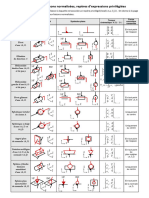
- Torseur Cinématique Des Liaisons NormailséesDocument1 pageTorseur Cinématique Des Liaisons Normailséesabderrahmanouarrach2004Pas encore d'évaluation
- Equations Du Chapitre 2Document2 pagesEquations Du Chapitre 2Badr Eddine MebarkiPas encore d'évaluation
- Bon Livre PDFDocument102 pagesBon Livre PDFØø Ismaël Seed ØøPas encore d'évaluation
- DS Mécanique S.N 21-23Document9 pagesDS Mécanique S.N 21-23cool clipsPas encore d'évaluation
- 2005 Maroc Correction Exo2Document2 pages2005 Maroc Correction Exo2enzo 07Pas encore d'évaluation
- Compte RenduDocument17 pagesCompte Rendubellal86% (7)
- 01 Dynamique Des SolidesDocument14 pages01 Dynamique Des SolidesIheb KarimPas encore d'évaluation
- Corrigé Série 3 - 2018 2019 PDFDocument6 pagesCorrigé Série 3 - 2018 2019 PDFIkram DahmaniPas encore d'évaluation
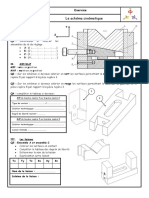
- Exercice Schema CinematiqueDocument5 pagesExercice Schema CinematiqueNadia SahliPas encore d'évaluation
- Benson Physique Mecanique - Chapitre - 8Document16 pagesBenson Physique Mecanique - Chapitre - 8emiliealachance67% (3)
- GYROSCOPEDocument2 pagesGYROSCOPEMoisePas encore d'évaluation
- AB A G Cos V: ProjectileDocument13 pagesAB A G Cos V: Projectileالشيخ معط الله عبد القادرPas encore d'évaluation
- TD4 20.21Document3 pagesTD4 20.21oumaima nouariPas encore d'évaluation
- STI MG - Correction Epreuve SIA 2006Document15 pagesSTI MG - Correction Epreuve SIA 2006meoh eezaPas encore d'évaluation
- Correction PhysiqueDocument116 pagesCorrection Physiqueben sylvanus ezanni FAMIEN100% (1)
- Chapitre 1: Mécanique Rationnelle IIDocument88 pagesChapitre 1: Mécanique Rationnelle IIBodrick KahoziPas encore d'évaluation
- Physique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresD'EverandPhysique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresÉvaluation : 5 sur 5 étoiles5/5 (2)
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsD'EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Un régime quantiqueD'EverandUn régime quantiqueÉvaluation : 5 sur 5 étoiles5/5 (1)
- Les LES TRUCS MATHEMATIQUES AU PRIMAIRE: et si on leur donnait du sens!D'EverandLes LES TRUCS MATHEMATIQUES AU PRIMAIRE: et si on leur donnait du sens!Évaluation : 2 sur 5 étoiles2/5 (1)
- Théorie relative de la musique: Maîtriser le mouvement par la logique des intervallesD'EverandThéorie relative de la musique: Maîtriser le mouvement par la logique des intervallesÉvaluation : 4 sur 5 étoiles4/5 (1)
- Mathématiques et Mathématiciens Pensées et CuriositésD'EverandMathématiques et Mathématiciens Pensées et CuriositésÉvaluation : 4.5 sur 5 étoiles4.5/5 (5)
- La Conscience Et L'Univers Existent Sans Commencement Ni FinD'EverandLa Conscience Et L'Univers Existent Sans Commencement Ni FinPas encore d'évaluation
- La pensée dirigée: Traité sur le raisonnement et les logiquesD'EverandLa pensée dirigée: Traité sur le raisonnement et les logiquesÉvaluation : 5 sur 5 étoiles5/5 (2)
- Sur les fondements de la théorie des ensembles transfinisD'EverandSur les fondements de la théorie des ensembles transfinisPas encore d'évaluation
- L'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.D'EverandL'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.Pas encore d'évaluation
- Voyager à Travers les Mondes Parallèles pour Atteindre vos RêvesD'EverandVoyager à Travers les Mondes Parallèles pour Atteindre vos RêvesÉvaluation : 4 sur 5 étoiles4/5 (11)
- Saturne: Les Grands Articles d'UniversalisD'EverandSaturne: Les Grands Articles d'UniversalisPas encore d'évaluation
- Guide complet de la Numérologie: Édition 30e anniversaireD'EverandGuide complet de la Numérologie: Édition 30e anniversaireÉvaluation : 4 sur 5 étoiles4/5 (1)
- L'Ombre à l'Univers: La structure des particules élémentaires XIIfD'EverandL'Ombre à l'Univers: La structure des particules élémentaires XIIfPas encore d'évaluation
- Enjeux contemporains de l'éducation scientifique et technologiqueD'EverandEnjeux contemporains de l'éducation scientifique et technologiqueAbdelkrim HasniPas encore d'évaluation