Vous aimerez peut-être aussi
- FlambementDocument6 pagesFlambementmarkelenor56Pas encore d'évaluation
- GM DS9-2013 CorrigéDocument4 pagesGM DS9-2013 CorrigéGray AbPas encore d'évaluation
- Flexion Plane SimpleDocument20 pagesFlexion Plane SimpleMIMFS93% (14)
- Treillis IsostatiqueDocument6 pagesTreillis Isostatiquefarid nanoPas encore d'évaluation
- Sujet IG-2006Document8 pagesSujet IG-2006Atou RamPas encore d'évaluation
- Rattrapage Année 2001-2002Document2 pagesRattrapage Année 2001-2002HamidPas encore d'évaluation
- DS n5 Corrigé - MPSI1Document5 pagesDS n5 Corrigé - MPSI1Zizo chmiaPas encore d'évaluation
- 2-Td Chapitre 1 - Introduction A La Résistance Des MatériauxDocument5 pages2-Td Chapitre 1 - Introduction A La Résistance Des MatériauxSaid SaidoPas encore d'évaluation
- Produit Scalaire Dans Etude Analytique (2) - Applications-: CercleDocument8 pagesProduit Scalaire Dans Etude Analytique (2) - Applications-: CercleSolaimane HammouchPas encore d'évaluation
- 1a PDFDocument8 pages1a PDFZo ZoPas encore d'évaluation
- Lecon 216Document24 pagesLecon 216Youssef ZentarPas encore d'évaluation
- TD12 Cinematique PDFDocument2 pagesTD12 Cinematique PDFŃîkïtà ÏmãnêPas encore d'évaluation
- MFTD 2Document3 pagesMFTD 2Fatima Ezzahrae BOUITAPas encore d'évaluation
- Etude Analytique Du CercleDocument8 pagesEtude Analytique Du CercleJAWAHIR MASSEUSEPas encore d'évaluation
- TP 5Document8 pagesTP 5Abdullah AbdulrahmanPas encore d'évaluation
- MecaDocument8 pagesMecaAbde DilamPas encore d'évaluation
- 9trigonajib1 PDFDocument16 pages9trigonajib1 PDFJohn Lwis100% (1)
- TP6 GFDocument3 pagesTP6 GFMohamed HeraouaPas encore d'évaluation
- Physique: Freinage Électromagnétique D'une Plaque MétalliqueDocument11 pagesPhysique: Freinage Électromagnétique D'une Plaque MétalliqueMihnea GamanPas encore d'évaluation
- TD Courbesparametrees CorrectionDocument11 pagesTD Courbesparametrees CorrectionAbdellatif KhafifPas encore d'évaluation
- TD0 Analyse Vectorielle - Rappels Et Compléments: A B C A B CDocument6 pagesTD0 Analyse Vectorielle - Rappels Et Compléments: A B C A B COunimborbitibou DJABONPas encore d'évaluation
- 211 PDFDocument8 pages211 PDFBlaise KalgPas encore d'évaluation
- Rattrapage Année 2001-2002Document2 pagesRattrapage Année 2001-2002mimaPas encore d'évaluation
- Exii 2Document3 pagesExii 2Narjiss ShimiPas encore d'évaluation
- Travaux Diriges Mecanique Du Solide IndeformableDocument4 pagesTravaux Diriges Mecanique Du Solide Indeformablec1765186Pas encore d'évaluation
- Exercices Avec Solution Statique PDFDocument20 pagesExercices Avec Solution Statique PDFAlarabi AraGuelma100% (1)
- Exam Juin 17 SMA4-SMI4Document3 pagesExam Juin 17 SMA4-SMI4AbderrahmanePas encore d'évaluation
- 00 2023 TD Révisions PTSI PTDocument8 pages00 2023 TD Révisions PTSI PTimadbourzamPas encore d'évaluation
- Bouakaz 02Document14 pagesBouakaz 02Saad TaibiPas encore d'évaluation
- 0B W Sprn2GfpY2M2OTgwZWQtNTQ3OS00NzZhLWFlNjktZjdjNWRhMDEwNzY5Document2 pages0B W Sprn2GfpY2M2OTgwZWQtNTQ3OS00NzZhLWFlNjktZjdjNWRhMDEwNzY5Asma BousamePas encore d'évaluation
- Rapport Dynamique de StructuresDocument16 pagesRapport Dynamique de Structuresaharchaou houdaPas encore d'évaluation
- Cinématique Colle 1Document3 pagesCinématique Colle 1elkhouddar yassinePas encore d'évaluation
- Corrigé Concours Blanc N°1 - 23-24Document3 pagesCorrigé Concours Blanc N°1 - 23-24yasser bhPas encore d'évaluation
- TD 09 - Cinématique Analytique - Dérivation VectorielleDocument3 pagesTD 09 - Cinématique Analytique - Dérivation VectoriellemoulyPas encore d'évaluation
- Physique 19Document20 pagesPhysique 19Meryem ELMOGHRTIPas encore d'évaluation
- DEVOIR N°2 DE BTSDocument2 pagesDEVOIR N°2 DE BTSDerry ESSONO ANDAPas encore d'évaluation
- TD Cinématique CHARIOT FILOGUIDEDocument4 pagesTD Cinématique CHARIOT FILOGUIDELamia Achour Ep Zanned100% (3)
- MA Examen 0506Document11 pagesMA Examen 0506Samir KarimPas encore d'évaluation
- Corriges Des T.-D. D'optique PhysiqueDocument38 pagesCorriges Des T.-D. D'optique PhysiqueJalal TiYal88% (8)
- Regulateur WattDocument2 pagesRegulateur WattAmara Neji83% (6)
- Osc AmDocument6 pagesOsc AmEvaPas encore d'évaluation
- TD-Cinématique: Compresseur ROOTDocument4 pagesTD-Cinématique: Compresseur ROOTGTA5player lucassPas encore d'évaluation
- SB MAK Fonctions ElliptiquesDocument34 pagesSB MAK Fonctions ElliptiquespubspampoubPas encore d'évaluation
- Bac Gabon Maths 2012 Series CEDocument9 pagesBac Gabon Maths 2012 Series CEJérémie NdjoyePas encore d'évaluation
- Compte Rendu TP5 Plan InclinéDocument8 pagesCompte Rendu TP5 Plan InclinéÀzïz LA75% (4)
- Oscillations Mécaniques AT Renf TS2Document5 pagesOscillations Mécaniques AT Renf TS2Coumbis DioufPas encore d'évaluation
- Série D'exercices - Physique Oscillations Mécaniques Libres - Bac Sciences Exp (2014-2015) MR Handoura NaceurDocument4 pagesSérie D'exercices - Physique Oscillations Mécaniques Libres - Bac Sciences Exp (2014-2015) MR Handoura Naceura6857971Pas encore d'évaluation
- Exo 8 TD CSDocument3 pagesExo 8 TD CSLouisPas encore d'évaluation
- Communicaton01tebessa 2Document9 pagesCommunicaton01tebessa 2abdouPas encore d'évaluation
- Exercices 3 Systèmes Mécaniques OscillantsDocument3 pagesExercices 3 Systèmes Mécaniques OscillantsIlidi houcinePas encore d'évaluation
- Em ExercicesDocument60 pagesEm ExercicesFabrice leonel Toukam PoualeuPas encore d'évaluation
- III - Calcul Des Structures Hyperstatiques-ConvertiDocument24 pagesIII - Calcul Des Structures Hyperstatiques-Convertilolitta noraPas encore d'évaluation
- Corrige de L'Epreuve de Sciences Physiques Du Second GroupeDocument2 pagesCorrige de L'Epreuve de Sciences Physiques Du Second GroupeMassamba DiopPas encore d'évaluation
- GM DS7-2015 CorrigeDocument6 pagesGM DS7-2015 CorrigeZakaria BENBARKAPas encore d'évaluation
- GS Physics Session 1 2019 French ExamDocument8 pagesGS Physics Session 1 2019 French Exambintou14gueyePas encore d'évaluation
- Emd GC L2 PDFDocument41 pagesEmd GC L2 PDFBreathe 4 footballPas encore d'évaluation
- Rapport de Synthese de La Méthode Des Forces TAGUIMTSOP Et TOBIODocument10 pagesRapport de Synthese de La Méthode Des Forces TAGUIMTSOP Et TOBIOLEIS DJIFACKPas encore d'évaluation
- TD 4 - Train CylindriqueDocument5 pagesTD 4 - Train CylindriqueahmedguerinPas encore d'évaluation
- TD 6 Hyperstatisme - Degré D'hyperstaticitéDocument3 pagesTD 6 Hyperstatisme - Degré D'hyperstaticitéahmedguerinPas encore d'évaluation
- Cours Mécanique GénéraleDocument23 pagesCours Mécanique GénéraleahmedguerinPas encore d'évaluation
- TD 4Document2 pagesTD 4ahmedguerinPas encore d'évaluation
- Potence ExtensibleDocument2 pagesPotence ExtensibleahmedguerinPas encore d'évaluation
- Cours Renforcement en MécaniqueDocument23 pagesCours Renforcement en MécaniqueahmedguerinPas encore d'évaluation
- TD 21 Corrigé - Loi E-S Pour Les Réducteurs Et Multiplicateurs de Vitesse À Train SimpleDocument6 pagesTD 21 Corrigé - Loi E-S Pour Les Réducteurs Et Multiplicateurs de Vitesse À Train SimplehoubaPas encore d'évaluation
- TD1 Calcul Du FrottementDocument6 pagesTD1 Calcul Du FrottementahmedguerinPas encore d'évaluation
- Etude Du FrottementDocument6 pagesEtude Du FrottementahmedguerinPas encore d'évaluation
- Réducteurs Et Multiplicateurs de VitesseDocument4 pagesRéducteurs Et Multiplicateurs de VitesseahmedguerinPas encore d'évaluation
- Vérin MélangeurDocument10 pagesVérin MélangeurahmedguerinPas encore d'évaluation
- Verin Melangeur CorrigeDocument4 pagesVerin Melangeur CorrigeahmedguerinPas encore d'évaluation
- Etude CapsuleuseDocument5 pagesEtude CapsuleuseahmedguerinPas encore d'évaluation
- Etude Du FrottementDocument6 pagesEtude Du FrottementahmedguerinPas encore d'évaluation
- Centre de GravitéDocument4 pagesCentre de GravitéahmedguerinPas encore d'évaluation
- Etude Des Forces Dans Les CâblesDocument12 pagesEtude Des Forces Dans Les Câblesahmedguerin100% (1)
- Vérin Électrique À VisDocument3 pagesVérin Électrique À VisahmedguerinPas encore d'évaluation
- Tête de Machine À Découper Les TôlesDocument1 pageTête de Machine À Découper Les TôlesahmedguerinPas encore d'évaluation
- Capsuleuse de BocauxDocument2 pagesCapsuleuse de BocauxahmedguerinPas encore d'évaluation
- (Analyse) Etau de Fraiseuse - e JMDocument3 pages(Analyse) Etau de Fraiseuse - e JMmarouf aek100% (3)
- CS-TM1-TD Hyperstatisme Bielle Manivelle CorrectionDocument9 pagesCS-TM1-TD Hyperstatisme Bielle Manivelle CorrectionPierre LancelotPas encore d'évaluation
- TD28 CorrectionDocument8 pagesTD28 CorrectionWasfi ZakariaPas encore d'évaluation
- Devoir Maison 4 - CorrDocument11 pagesDevoir Maison 4 - CorrAmal FatouhPas encore d'évaluation
- TP7-vilebrequincoursDocument10 pagesTP7-vilebrequincoursdenis yakouaPas encore d'évaluation
- Cossinet Catalogue 2011 2012 BearingDocument22 pagesCossinet Catalogue 2011 2012 BearingSarl Gaf PmtpcPas encore d'évaluation
- Liaisons MECANIQUESDocument3 pagesLiaisons MECANIQUESAyoubDrissi100% (1)
- Ep Maths - Statique Micromoteur - ProfDocument1 pageEp Maths - Statique Micromoteur - Profstephane dorbePas encore d'évaluation
- Stirling Type BetaDocument8 pagesStirling Type BetaLukas DelattrePas encore d'évaluation
- Klubprepa Extrait 6438Document8 pagesKlubprepa Extrait 6438salim abdouPas encore d'évaluation
- Montage de Verins Et Liaisons EquivalentesDocument9 pagesMontage de Verins Et Liaisons EquivalentesIlyas MhammediPas encore d'évaluation
- td02 Cin - Tendeur Courroie Corrige PDFDocument2 pagestd02 Cin - Tendeur Courroie Corrige PDFFilaliAbderrahimPas encore d'évaluation
- TD - Serre Joint PDFDocument5 pagesTD - Serre Joint PDFDiego David F67% (3)
- TD Coupe TubeDocument6 pagesTD Coupe TubeSimo StitPas encore d'évaluation
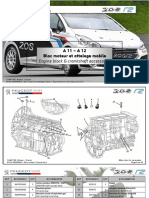
- A9R2 A11 A12 - Bloc - Moteur Attelage MobileDocument25 pagesA9R2 A11 A12 - Bloc - Moteur Attelage MobileLevy axel KonanPas encore d'évaluation
- DS Micromoteur - Compresseur Clim CORRDocument1 pageDS Micromoteur - Compresseur Clim CORRAdil Hassani IdrissiPas encore d'évaluation
- 02 Modelisation LiaisonsDocument1 page02 Modelisation Liaisonsnino fernandesPas encore d'évaluation
- Regulateur Boules Correction CINEMATIQUEDocument6 pagesRegulateur Boules Correction CINEMATIQUEMoustapha Diagne100% (1)
- Theorie Des Mecanismes Hyperstatisme, Mobilite, Liaison EquivalenteDocument8 pagesTheorie Des Mecanismes Hyperstatisme, Mobilite, Liaison EquivalenteothmanePas encore d'évaluation
- Torseur Statique Liaison UsuelleDocument1 pageTorseur Statique Liaison Usuellemaths93100% (2)
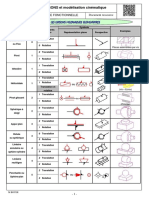
- Les Liaisons Mecaniques Elementaires: LIAISONS Et Modélisation CinématiqueDocument1 pageLes Liaisons Mecaniques Elementaires: LIAISONS Et Modélisation CinématiqueDhayou GraphyPas encore d'évaluation
- DS1 StatiqueDocument5 pagesDS1 StatiqueYassinePas encore d'évaluation
- Machines Thermiques I - SérieTD - CorrigéDocument23 pagesMachines Thermiques I - SérieTD - CorrigéDroidy SpacePas encore d'évaluation
- Corrigé TD 23 - Comportement Statique Des SystèmesDocument7 pagesCorrigé TD 23 - Comportement Statique Des Systèmesbhs channelPas encore d'évaluation
- 3 TP Etude Du Systeme Bielle ManivelleDocument12 pages3 TP Etude Du Systeme Bielle ManivelleNassim RabaouiPas encore d'évaluation
- Fonction Transmettre Schematisation Et LiaisonsDocument10 pagesFonction Transmettre Schematisation Et LiaisonsHamami AymenPas encore d'évaluation
- Melangeur: 1. DescriptionDocument6 pagesMelangeur: 1. DescriptionAmine Ait bounouPas encore d'évaluation
- Catalogue Pièces Iseki Detaļu SarakstsDocument33 pagesCatalogue Pièces Iseki Detaļu SarakstsViktors BrujevsPas encore d'évaluation
- Association de Liaisons PDFDocument8 pagesAssociation de Liaisons PDFAnis SouissiPas encore d'évaluation
- Polo RTA:bas Moteur Eclaté de PiecesDocument2 pagesPolo RTA:bas Moteur Eclaté de PiecesE_ClavePas encore d'évaluation