Vous aimerez peut-être aussi
- Ordre D'isolementDocument6 pagesOrdre D'isolementESSOME ESSOME OLIVIER STEPHANEPas encore d'évaluation
- Test Statique 2015 2016 Sujet v2 0Document10 pagesTest Statique 2015 2016 Sujet v2 0KOUADIO PATRICEPas encore d'évaluation
- Compte Rendu1 RDMDocument9 pagesCompte Rendu1 RDMHIMRI DOUNIA MALAKPas encore d'évaluation
- Compte Rendu de TP1 STRUCTDocument12 pagesCompte Rendu de TP1 STRUCTdahelihabeddinePas encore d'évaluation
- Calcul Des Structures - Application de La Méthode Des Forces PDFDocument28 pagesCalcul Des Structures - Application de La Méthode Des Forces PDFvladimir zogoPas encore d'évaluation
- ST 2an19 s3 Emd Physique2011Document7 pagesST 2an19 s3 Emd Physique2011Sokaina MaroufiPas encore d'évaluation
- 5w9w2-Examen Physique 03 2011Document3 pages5w9w2-Examen Physique 03 2011Manizan Emmanuel YaoPas encore d'évaluation
- TD Forces 2S 2021-WahabDiopDocument2 pagesTD Forces 2S 2021-WahabDiopAlioune Badara NdiayePas encore d'évaluation
- Correction MonophaséDocument5 pagesCorrection MonophasénzeussPas encore d'évaluation
- M1 GI GI712 CorrigéDocument4 pagesM1 GI GI712 CorrigéAbdou BencheikhPas encore d'évaluation
- Sujet MECANIQUE APPLIQUEE TF3 Seq 4Document3 pagesSujet MECANIQUE APPLIQUEE TF3 Seq 4Thierry Aymard Dieubou100% (1)
- Cours Le PFSDocument6 pagesCours Le PFSanaszaidouni07Pas encore d'évaluation
- Corrigé Fiche 2 Metrologie II - IlesDocument7 pagesCorrigé Fiche 2 Metrologie II - IlesFiras MahjoubiPas encore d'évaluation
- 5wa3w-Examen Special Physique3 2010 2011Document4 pages5wa3w-Examen Special Physique3 2010 2011Manizan Emmanuel YaoPas encore d'évaluation
- Lois de La StatiqueDocument22 pagesLois de La StatiqueManel DallaliPas encore d'évaluation
- TD FORCES Diourbel 2024 - WahabdiopDocument2 pagesTD FORCES Diourbel 2024 - WahabdiopRolfrid Mayandza BoyahouPas encore d'évaluation
- CORRIG Test Blanc Nov 2016NEW PDFDocument9 pagesCORRIG Test Blanc Nov 2016NEW PDFJohnny KozyPas encore d'évaluation
- Cours + TD + TP Rsistance Des Matriaux PR - Abdenaser Bahrar 02-06-2017 PDFDocument83 pagesCours + TD + TP Rsistance Des Matriaux PR - Abdenaser Bahrar 02-06-2017 PDFYassine El AnssariPas encore d'évaluation
- Cours + TD + TP Rsistance Des Matriaux PR - Abdenaser Bahrar 02-06-2017 PDFDocument83 pagesCours + TD + TP Rsistance Des Matriaux PR - Abdenaser Bahrar 02-06-2017 PDFYassine El Anssari100% (3)
- TD 05Document1 pageTD 05Khelif HichemPas encore d'évaluation
- Examen Rattrapage Corrigé 2021Document2 pagesExamen Rattrapage Corrigé 2021Adam EL AlamiPas encore d'évaluation
- Meca ChallengeDocument7 pagesMeca ChallengetresorlemanifiquePas encore d'évaluation
- TD N°1Document1 pageTD N°1chaimakemouche8Pas encore d'évaluation
- 07 CoursDocument8 pages07 CoursPseudo785Pas encore d'évaluation
- Cours Plus Exercices Corriges D'électrocinétique PDFDocument147 pagesCours Plus Exercices Corriges D'électrocinétique PDFfayscal83% (18)
- Contrôle Electricité Electrotechnique - LP-MIEURE PDFDocument2 pagesContrôle Electricité Electrotechnique - LP-MIEURE PDFNabil HaoufPas encore d'évaluation
- Examen FF 2018 Corrigé V2Document6 pagesExamen FF 2018 Corrigé V2Anas BelladPas encore d'évaluation
- TD1 CorrectionDocument8 pagesTD1 CorrectionDaoud ElalouanyPas encore d'évaluation
- Introduction À La Méthode Des Éléments Finis (TD BUT GMP 3)Document7 pagesIntroduction À La Méthode Des Éléments Finis (TD BUT GMP 3)Elouneg Kira AflahPas encore d'évaluation
- Eva 3 Phy 2ndec Jan 2023 CPNDocument3 pagesEva 3 Phy 2ndec Jan 2023 CPNaurelintetchangPas encore d'évaluation
- TP1 CorrDocument3 pagesTP1 CorrAnassPas encore d'évaluation
- TD2 L1-MPI Champ Potentiel 2019-20Document10 pagesTD2 L1-MPI Champ Potentiel 2019-20thierry D100% (1)
- Noyaux, Masse Et Énergie FDocument4 pagesNoyaux, Masse Et Énergie Fsihammouatassim3Pas encore d'évaluation
- 03-Cours PFSDocument5 pages03-Cours PFSF1R3 F0XPas encore d'évaluation
- Correction Statistique 2018-2019Document6 pagesCorrection Statistique 2018-2019Oussama LamhiliPas encore d'évaluation
- Cours Complet Statique PDFDocument19 pagesCours Complet Statique PDFHriraOni80% (5)
- CH 1 (Introduction)Document9 pagesCH 1 (Introduction)Badis HamekPas encore d'évaluation
- 01exercices dElasticitéDocument12 pages01exercices dElasticitéSaâd SardiPas encore d'évaluation
- Les Transformateurs Triphasés: 5 UEF 3.1.1 Electromécanique Machines Électriques (Cours: 1h30, TD: 1h30) 4 2Document8 pagesLes Transformateurs Triphasés: 5 UEF 3.1.1 Electromécanique Machines Électriques (Cours: 1h30, TD: 1h30) 4 2Anis AissaouiPas encore d'évaluation
- Correction Du TD de RayonnementDocument19 pagesCorrection Du TD de RayonnementĶhadija KhadijaPas encore d'évaluation
- RDM Estp Application 7Document14 pagesRDM Estp Application 7Thony Likeng100% (2)
- Examen Transfert de Chaleur 2020-2021Document4 pagesExamen Transfert de Chaleur 2020-2021Mohamed DjaiPas encore d'évaluation
- Série TD 1 Compléments Mathématiques Physique1Document7 pagesSérie TD 1 Compléments Mathématiques Physique1big bossPas encore d'évaluation
- Cours 1 M1AII Modélisation Des Systèmes DynamiquesDocument8 pagesCours 1 M1AII Modélisation Des Systèmes DynamiquessamihrrrrrPas encore d'évaluation
- Série TD 6 Phys2 2019 - 2020+corrigéDocument4 pagesSérie TD 6 Phys2 2019 - 2020+corrigéamiranomi5Pas encore d'évaluation
- TD1Document2 pagesTD1Möräđ ÄbPas encore d'évaluation
- Principe Fondamental de La Statique - Cours Première STI GCDocument13 pagesPrincipe Fondamental de La Statique - Cours Première STI GCPaulochon100% (3)
- Mines MP 2007 SIDocument5 pagesMines MP 2007 SIFares MentseurPas encore d'évaluation
- MEF Dev1 Cor-0218-2019Document14 pagesMEF Dev1 Cor-0218-2019TOVIHO SessinouPas encore d'évaluation
- S2 CF Algebre 1415Document6 pagesS2 CF Algebre 1415Youssef HjiraPas encore d'évaluation
- TD 06Document4 pagesTD 06stophPas encore d'évaluation
- TDs Calcul Structures - Corrigé 2212 - 231222 - 143922Document7 pagesTDs Calcul Structures - Corrigé 2212 - 231222 - 143922anasidy4Pas encore d'évaluation
- MIMO TD3 Pôle Zéros Des Système MIMO - Avec - Solution - 2019Document22 pagesMIMO TD3 Pôle Zéros Des Système MIMO - Avec - Solution - 2019Ño ÑaměPas encore d'évaluation
- S1 - Ue4 - Structure I - Ecue2 - RdmaDocument52 pagesS1 - Ue4 - Structure I - Ecue2 - Rdmayannickcodo32Pas encore d'évaluation
- TPE RDM FinalDocument18 pagesTPE RDM Finaltunay cefPas encore d'évaluation
- Exercices PC TC International 18 1Document13 pagesExercices PC TC International 18 1Physique MehdaouiPas encore d'évaluation
- MI IV 110 A ProfDocument15 pagesMI IV 110 A ProfKOUADIO PATRICEPas encore d'évaluation
- La Loi de Pareto: Mi Iv 205 ADocument7 pagesLa Loi de Pareto: Mi Iv 205 AKOUADIO PATRICEPas encore d'évaluation
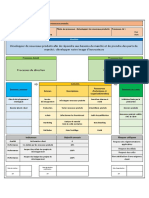
- Décoder Et Interpréter Le Dossier Technique D'un Système de ProductionDocument6 pagesDécoder Et Interpréter Le Dossier Technique D'un Système de ProductionKOUADIO PATRICEPas encore d'évaluation
- Respecter Les Consignes Et Les Procedures: Mi V 33 A1Document11 pagesRespecter Les Consignes Et Les Procedures: Mi V 33 A1KOUADIO PATRICEPas encore d'évaluation
- MI IV 205 D ProfDocument7 pagesMI IV 205 D ProfKOUADIO PATRICEPas encore d'évaluation
- Referentiel CQP Pilote de Ligne AutomatiseeDocument34 pagesReferentiel CQP Pilote de Ligne AutomatiseeKOUADIO PATRICEPas encore d'évaluation
- Renseigner Le Compte-Rendu de Maniere Fiable: Mi V 46 A1Document13 pagesRenseigner Le Compte-Rendu de Maniere Fiable: Mi V 46 A1KOUADIO PATRICEPas encore d'évaluation
- Par Rapport Aux Fonctions Hydrauliques À Réaliser, Justifier Le Choix Des ComposantsDocument6 pagesPar Rapport Aux Fonctions Hydrauliques À Réaliser, Justifier Le Choix Des ComposantsKOUADIO PATRICEPas encore d'évaluation
- S'Assurer de Son Autorisation A Intervenir: Mi V 45 C1Document6 pagesS'Assurer de Son Autorisation A Intervenir: Mi V 45 C1KOUADIO PATRICEPas encore d'évaluation
- Référentiel - CAP Conducteur D Installations de ProductionDocument65 pagesRéférentiel - CAP Conducteur D Installations de ProductionKOUADIO PATRICEPas encore d'évaluation
- Mesurer Au Rapporteur: Mi V 72 A1Document8 pagesMesurer Au Rapporteur: Mi V 72 A1KOUADIO PATRICEPas encore d'évaluation
- Maintenance Industrielle: MI-IV-111 ADocument10 pagesMaintenance Industrielle: MI-IV-111 AKOUADIO PATRICEPas encore d'évaluation
- MI IV 200 A ProfDocument20 pagesMI IV 200 A ProfKOUADIO PATRICEPas encore d'évaluation
- MI IV 201 A EleveDocument13 pagesMI IV 201 A EleveKOUADIO PATRICEPas encore d'évaluation
- Decoder Un Schema Electrique Et Hydraulique: Maintenance IndustrielleDocument10 pagesDecoder Un Schema Electrique Et Hydraulique: Maintenance IndustrielleKOUADIO PATRICEPas encore d'évaluation
- Coder Une Sequence de Grafcet: Mi Iv 333 BDocument19 pagesCoder Une Sequence de Grafcet: Mi Iv 333 BKOUADIO PATRICEPas encore d'évaluation
- Expose Sur Le Gaz Naturel Et Leur Origine FormationDocument4 pagesExpose Sur Le Gaz Naturel Et Leur Origine Formationnabaloummael4Pas encore d'évaluation
- D1 1S1 2019 LSLL Wahab-DiopFirstDocument2 pagesD1 1S1 2019 LSLL Wahab-DiopFirstYaya Touré100% (1)
- Ti 2Document2 pagesTi 2Jean Bosco Albert RandriamampiandraPas encore d'évaluation
- Corrige Examen FF 2020 TSMFMDocument10 pagesCorrige Examen FF 2020 TSMFMSou Mia67% (6)
- Audit Et Contrôle Interne Une Activité Ignorée Par Les EPEDocument1 pageAudit Et Contrôle Interne Une Activité Ignorée Par Les EPEMessa BoualemPas encore d'évaluation
- 2019 09 LID SM Catalogue de Garnitures Mecaniques SouflletDocument94 pages2019 09 LID SM Catalogue de Garnitures Mecaniques SouflletAbdellatif BelkhairPas encore d'évaluation
- 02 L'acte de Constitution Haiti Sante de L'eauDocument4 pages02 L'acte de Constitution Haiti Sante de L'eauAinekPas encore d'évaluation
- Durkheim 1950Document157 pagesDurkheim 1950EL MOUHIB EL MAHDIPas encore d'évaluation
- RGPH-5 Manuel AR v30032023 Ok Fin Mars 2023+coord OKDocument76 pagesRGPH-5 Manuel AR v30032023 Ok Fin Mars 2023+coord OKLa RosePas encore d'évaluation
- Appareillage Électrique Basse TensionDocument5 pagesAppareillage Électrique Basse TensionAbdelkarim AmmarPas encore d'évaluation
- Fanuc Serie 16 PDFDocument1 119 pagesFanuc Serie 16 PDFKhalil Radouane100% (1)
- Découvrir Mahajanga en 3 JoursDocument13 pagesDécouvrir Mahajanga en 3 JoursMicha JohnsonPas encore d'évaluation
- Evaluation D'actions Et D'entreprisesDocument41 pagesEvaluation D'actions Et D'entrepriseskra kobena BINIPas encore d'évaluation
- Metaplasie CIN: Diu de ColposcopieDocument50 pagesMetaplasie CIN: Diu de ColposcopieMaria MogosPas encore d'évaluation
- Protection TransformateurDocument78 pagesProtection TransformateurDjebien Ahmed Abu AbderrahimPas encore d'évaluation
- Appel BM012023Document80 pagesAppel BM012023ابراهيمهبولةPas encore d'évaluation
- Recos 4e Definition IDM 2018Document10 pagesRecos 4e Definition IDM 2018Simona IonitaPas encore d'évaluation
- Expressions À Utiliser Dans Une Introduction: Trois Étapes Sont À EnvisagerDocument3 pagesExpressions À Utiliser Dans Une Introduction: Trois Étapes Sont À Envisagerhorny negroPas encore d'évaluation
- QGIS 2.8 UserGuide FRDocument349 pagesQGIS 2.8 UserGuide FRFaniry Anja RandrianPas encore d'évaluation
- Kaushitaki Brahmana Upanishad (Document)Document19 pagesKaushitaki Brahmana Upanishad (Document)giovannagarritanoPas encore d'évaluation
- L'appel de Tebboune: Le QuotidienDocument16 pagesL'appel de Tebboune: Le QuotidienMaxi PowerPas encore d'évaluation
- Beirut University Letter of Motivation For Landscape Architecture MasterDocument2 pagesBeirut University Letter of Motivation For Landscape Architecture MasterBEIRUT100% (2)
- RD N°0302Document6 pagesRD N°0302DOMINGO ModestePas encore d'évaluation
- DN214Document8 pagesDN214Den LeonidasPas encore d'évaluation
- 14 - Imposition Des Res Des Stes IR NPCDocument6 pages14 - Imposition Des Res Des Stes IR NPCRuffin MickaelPas encore d'évaluation
- La Somme Et Le Reste No. 18Document21 pagesLa Somme Et Le Reste No. 18alfredorubiobazan5168Pas encore d'évaluation
- Rapport de Sensibilisation - DéfinitifDocument51 pagesRapport de Sensibilisation - DéfinitifLova AndriamanampisoaPas encore d'évaluation
- Varlogic N - 52449Document2 pagesVarlogic N - 52449valery tagne tallePas encore d'évaluation
- Contrat de Construction de NavireDocument2 pagesContrat de Construction de NavireAyoub Ben AbdAllahPas encore d'évaluation
- P1C3-Formulaire Fiche IdentitéDocument1 pageP1C3-Formulaire Fiche Identitémoustafa officielPas encore d'évaluation
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsD'EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Chevaux de Fer - Locomotives Agricoles et Tracteurs LégendairesD'EverandChevaux de Fer - Locomotives Agricoles et Tracteurs LégendairesPas encore d'évaluation
- Harmonisation Energétique des Personnes: Manuel de Curothérapie 2020D'EverandHarmonisation Energétique des Personnes: Manuel de Curothérapie 2020Évaluation : 4 sur 5 étoiles4/5 (8)
- Bioénergie et Sciences Occultes: Pour un corps sain et un esprit sain dans un lieu sainD'EverandBioénergie et Sciences Occultes: Pour un corps sain et un esprit sain dans un lieu sainÉvaluation : 4 sur 5 étoiles4/5 (2)
- Théorie relative de la musique: Maîtriser le mouvement par la logique des intervallesD'EverandThéorie relative de la musique: Maîtriser le mouvement par la logique des intervallesÉvaluation : 4 sur 5 étoiles4/5 (1)
- La pensée dirigée: Traité sur le raisonnement et les logiquesD'EverandLa pensée dirigée: Traité sur le raisonnement et les logiquesÉvaluation : 5 sur 5 étoiles5/5 (2)
- Physique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresD'EverandPhysique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresÉvaluation : 5 sur 5 étoiles5/5 (2)
- Le profilage au service du football: Démarche scientifique pour un recrutement et entraînements optimisésD'EverandLe profilage au service du football: Démarche scientifique pour un recrutement et entraînements optimisésPas encore d'évaluation
- le Phoenix de nos âmes: Les lois énergétiques de la lumière divineD'Everandle Phoenix de nos âmes: Les lois énergétiques de la lumière divinePas encore d'évaluation
- La Conscience Et L'Univers Existent Sans Commencement Ni FinD'EverandLa Conscience Et L'Univers Existent Sans Commencement Ni FinPas encore d'évaluation
- L'Ombre à l'Univers: La structure des particules élémentaires XIIfD'EverandL'Ombre à l'Univers: La structure des particules élémentaires XIIfPas encore d'évaluation
- Un régime quantiqueD'EverandUn régime quantiqueÉvaluation : 5 sur 5 étoiles5/5 (1)
- Voyager à Travers les Mondes Parallèles pour Atteindre vos RêvesD'EverandVoyager à Travers les Mondes Parallèles pour Atteindre vos RêvesÉvaluation : 4 sur 5 étoiles4/5 (11)
- L'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.D'EverandL'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.Pas encore d'évaluation
- Sur les fondements de la théorie des ensembles transfinisD'EverandSur les fondements de la théorie des ensembles transfinisPas encore d'évaluation
- La somme existentielle II/III Le mystère de l'homme: Un mystère d'amourD'EverandLa somme existentielle II/III Le mystère de l'homme: Un mystère d'amourPas encore d'évaluation
- Signe pour le Saint Graal? Énergie infinie avec des possibilités infinies! Mesurer avec l’antenne de Lecher à Carnac et en Bretagne en FranceD'EverandSigne pour le Saint Graal? Énergie infinie avec des possibilités infinies! Mesurer avec l’antenne de Lecher à Carnac et en Bretagne en FrancePas encore d'évaluation
- Saturne: Les Grands Articles d'UniversalisD'EverandSaturne: Les Grands Articles d'UniversalisPas encore d'évaluation