Vous aimerez peut-être aussi
- F08Document6 pagesF08hemsasPas encore d'évaluation
- Commande Par Mode Glissant Dune Machine Synchrone À Aiment Permanent MSAP Aribi Nedjaa Riad PDFDocument1 pageCommande Par Mode Glissant Dune Machine Synchrone À Aiment Permanent MSAP Aribi Nedjaa Riad PDFÃÿ MęnPas encore d'évaluation
- Chapitre3 Technique de La Commande ÉlectriqueDocument11 pagesChapitre3 Technique de La Commande Électriqueاشر اقPas encore d'évaluation
- Cours 12Document7 pagesCours 12mohamed nasrilarbiPas encore d'évaluation
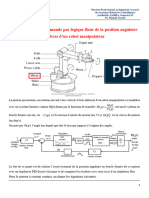
- SE2I ROBOTIQUE Principe ServomoteurDocument2 pagesSE2I ROBOTIQUE Principe ServomoteurabdelwahadPas encore d'évaluation
- RA Gulation de Vitesse D Une Machine Asynchrone-CIFA 03-03-2010 FinaleDocument6 pagesRA Gulation de Vitesse D Une Machine Asynchrone-CIFA 03-03-2010 Finalement elehashimiePas encore d'évaluation
- Art 7Document13 pagesArt 7Koukou AmkoukouPas encore d'évaluation
- Commande Mas Alpha BetaDocument4 pagesCommande Mas Alpha Betaadil bakkariPas encore d'évaluation
- SE2I ROBOTIQUE Principe ServomoteurDocument2 pagesSE2I ROBOTIQUE Principe Servomoteurzouaoua slimanePas encore d'évaluation
- Sujet Ter Masap 10Document2 pagesSujet Ter Masap 10jarmeePas encore d'évaluation
- Saturation MASDocument6 pagesSaturation MASMagloire TshihilukaPas encore d'évaluation
- Commande MsapDocument6 pagesCommande Msapsakridj100% (1)
- Mon Cours DTCDocument2 pagesMon Cours DTCYounesPas encore d'évaluation
- Commande de La MSAPDocument2 pagesCommande de La MSAPHamouchePas encore d'évaluation
- Msap DiapoDocument41 pagesMsap Diapoabd elhamid mabrouk0% (2)
- RobotiqueDocument10 pagesRobotiqueOUMAYMA CHMARKHPas encore d'évaluation
- 6115 Enonce Verin 6 AxesDocument6 pages6115 Enonce Verin 6 AxesMohammed RedPas encore d'évaluation
- Modélisation Des Machines Électriques - Machine SychroneDocument38 pagesModélisation Des Machines Électriques - Machine SychroneAttachi Mohamed LaminePas encore d'évaluation
- Pfe PPDocument44 pagesPfe PPmoadPas encore d'évaluation
- Mini Projet Commande Par Logique FloueDocument2 pagesMini Projet Commande Par Logique FlouebessifimunaPas encore d'évaluation
- Dossier Technique Robot Ericc 3Document9 pagesDossier Technique Robot Ericc 3ayoubamine191200617Pas encore d'évaluation
- La Commande Sans Capteur MRASDocument9 pagesLa Commande Sans Capteur MRASMohamed SomaiPas encore d'évaluation
- Command Machin ElectrDocument28 pagesCommand Machin ElectrAhmed KramdiPas encore d'évaluation
- SurveillanceDocument41 pagesSurveillanceBoukhrisse HamzaPas encore d'évaluation
- Machines Asynchrones Commande Vectorielle LivreDocument34 pagesMachines Asynchrones Commande Vectorielle LivreSofiane DouidaPas encore d'évaluation
- Article BL Tebessa 2009Document7 pagesArticle BL Tebessa 2009Âh MèdPas encore d'évaluation
- TP Commande Des MachinesDocument21 pagesTP Commande Des MachinesTa Divika Hasterivy100% (1)
- Manuel TP 1Document47 pagesManuel TP 1Mohamed Amine Zouhri100% (3)
- Adaptation Des Paramètres D'un Contrôleur PI Par Un FLC Appliqué À Un Moteur AsynchroneDocument6 pagesAdaptation Des Paramètres D'un Contrôleur PI Par Un FLC Appliqué À Un Moteur AsynchroneAnass TaouFik100% (1)
- SSP 020 Boîte de Vitesses Automatique - Bases-2Document38 pagesSSP 020 Boîte de Vitesses Automatique - Bases-2DjontuconstantPas encore d'évaluation
- Asservissement MCCDocument37 pagesAsservissement MCCsmail4everPas encore d'évaluation
- Connaitre La Position D'un Servo MoteurDocument8 pagesConnaitre La Position D'un Servo MoteurAnonyme AnonymesPas encore d'évaluation
- ATTOU Amine RMG MSAPDocument29 pagesATTOU Amine RMG MSAPAttouAmine0% (1)
- Modelisation CMD MSAPDocument35 pagesModelisation CMD MSAPKoukou AmkoukouPas encore d'évaluation
- Commandeen Vitessedu Moteur Synchrone Aimants Permanents Dotedun Observateurd Etatde LUENBERGERDocument7 pagesCommandeen Vitessedu Moteur Synchrone Aimants Permanents Dotedun Observateurd Etatde LUENBERGERBekkour HoussamPas encore d'évaluation
- Compte Rendu de TP 02 - EC842Document19 pagesCompte Rendu de TP 02 - EC842Âh MèdPas encore d'évaluation
- Balancing Robot PDFDocument42 pagesBalancing Robot PDFxxPas encore d'évaluation
- 1 Système NAODocument5 pages1 Système NAOadrien.demaison85Pas encore d'évaluation
- PROJET ORGANEdocxDocument26 pagesPROJET ORGANEdocxJonathan ManzakiPas encore d'évaluation
- TP Moteur CC Pilote EleveDocument4 pagesTP Moteur CC Pilote Eleveladabd2Pas encore d'évaluation
- Etude D'une Commande DynamiqueDocument6 pagesEtude D'une Commande DynamiqueMed MaxPas encore d'évaluation
- Trés Bon Resumé Sur La Commande ScalaireDocument7 pagesTrés Bon Resumé Sur La Commande ScalaireLahoucine BizlafenPas encore d'évaluation
- Séquence 3 - Sciences de L'ingénieur - La Machine À Courant Continu en Régime PermanentDocument3 pagesSéquence 3 - Sciences de L'ingénieur - La Machine À Courant Continu en Régime PermanentannaPas encore d'évaluation
- COURS Commande Des Machines CA MCSI-convertiDocument44 pagesCOURS Commande Des Machines CA MCSI-convertiAbdy HamenihPas encore d'évaluation
- Lmeca CM6Document12 pagesLmeca CM6rayane abbasPas encore d'évaluation
- Variation de Vitesses Appli Industrielles PDFDocument7 pagesVariation de Vitesses Appli Industrielles PDFLarry FlowersPas encore d'évaluation
- Fascicule TP 2017 2018 PDFDocument24 pagesFascicule TP 2017 2018 PDFSafa SafsoufaPas encore d'évaluation
- Exposée ArduinoDocument15 pagesExposée ArduinoIheb Hamed100% (1)
- Cours CME MSDocument34 pagesCours CME MSHaidra HaidraPas encore d'évaluation
- Partie PratiqueDocument10 pagesPartie PratiqueHàjàr KcimPas encore d'évaluation
- TP MoteurDocument4 pagesTP MoteurAmine AlaouiPas encore d'évaluation
- Cours-Codeurs-moteurs I4811 v010 OdtDocument6 pagesCours-Codeurs-moteurs I4811 v010 OdtBrahim AchayfadPas encore d'évaluation
- TP 2Document13 pagesTP 2Mohammed ALMUSHIAA50% (2)
- Asservissement AnalogiqueDocument72 pagesAsservissement AnalogiqueOussama EttahiriPas encore d'évaluation
- Plaquette de Presentation ControlxDocument21 pagesPlaquette de Presentation ControlxFifi le javeloteux.Pas encore d'évaluation
- Benmansour - El Houmri - Commande Scalaire Et VectorielleDocument32 pagesBenmansour - El Houmri - Commande Scalaire Et VectoriellekaoutharPas encore d'évaluation
- Cours 2 Principe de La Transformation VectorielleDocument11 pagesCours 2 Principe de La Transformation VectorielleYoussef romadiPas encore d'évaluation
- Cours 3 Modelisation Vectorielle de La MSDocument8 pagesCours 3 Modelisation Vectorielle de La MSYoussef romadiPas encore d'évaluation
- 02 - Series Numeriques Notes de Cours-2Document4 pages02 - Series Numeriques Notes de Cours-2Youssef romadiPas encore d'évaluation
- Rapport SMAP Lot3 VFDocument53 pagesRapport SMAP Lot3 VFYoussef romadiPas encore d'évaluation
- 14 Mecanique Forces CentralesDocument5 pages14 Mecanique Forces CentralesYoussef romadiPas encore d'évaluation
- 09 Mecanique Oscillations LibresDocument4 pages09 Mecanique Oscillations LibresYoussef romadiPas encore d'évaluation
- Proba Chap1Document8 pagesProba Chap1Abdelghani AninichPas encore d'évaluation
- td26 Em3 ZZZ Complement Effet Hall Avec CorrigeDocument2 pagestd26 Em3 ZZZ Complement Effet Hall Avec CorrigeAyman BenamerPas encore d'évaluation
- 02 Fonction Charge - PpsDocument23 pages02 Fonction Charge - Ppschebli adelPas encore d'évaluation
- Machine Courant Continu Et AlternatifDocument18 pagesMachine Courant Continu Et AlternatifngouoPas encore d'évaluation
- PFE 2016 YAHI NOUAR Final PDFDocument102 pagesPFE 2016 YAHI NOUAR Final PDFMehdi YahiPas encore d'évaluation
- Chapitre 4 - Les Machines A Courant Continu MCCDocument10 pagesChapitre 4 - Les Machines A Courant Continu MCCʚǐɞ Zõlã ʚǐɞPas encore d'évaluation
- TD AsynchroneDocument2 pagesTD AsynchroneSoufiane ElganiPas encore d'évaluation
- AlianeChafa ZerioulAziz-convertiDocument71 pagesAlianeChafa ZerioulAziz-convertikoudiehy tourePas encore d'évaluation
- Projet Modelisation Et Simulation de La PDFDocument29 pagesProjet Modelisation Et Simulation de La PDFHmz OussamaPas encore d'évaluation
- Diagramme CercleDocument45 pagesDiagramme CercleYann ElhamPas encore d'évaluation
- Armenski, Falk - Micromachines Électriques - Mir - 1977Document279 pagesArmenski, Falk - Micromachines Électriques - Mir - 1977Hicham YangPas encore d'évaluation
- MP Sujet V6 - 11Document17 pagesMP Sujet V6 - 11Ahmed Med AbdellahiPas encore d'évaluation
- Mii 00042Document41 pagesMii 00042سالمي عبد الرحمن البحرPas encore d'évaluation
- Alternateurs de Voiture en Usage ÉolienDocument11 pagesAlternateurs de Voiture en Usage ÉolienErudíhen100% (2)
- Chapitre 7 La Machine AsynchroneDocument12 pagesChapitre 7 La Machine AsynchroneKHALID EL MAANAOUIPas encore d'évaluation
- Memoire MASTER 2020... FFDocument91 pagesMemoire MASTER 2020... FFAbderrahmane benlahbib100% (1)
- Variateur de Vitesse Et AutomateDocument111 pagesVariateur de Vitesse Et Automatedavid ouffouePas encore d'évaluation
- Chapitre 04 Défaut de RoulementDocument19 pagesChapitre 04 Défaut de RoulementAMEL REBBOUCHEPas encore d'évaluation
- Variation de La Vitesse Du Moteur À Courant Continu Par Pid FlouDocument66 pagesVariation de La Vitesse Du Moteur À Courant Continu Par Pid Floufares khenPas encore d'évaluation
- Mémoire Fin D'étudeDocument104 pagesMémoire Fin D'étudeDavid WalterPas encore d'évaluation
- Correction: V CC VDocument6 pagesCorrection: V CC Vzakariae ben-akkaPas encore d'évaluation
- 01889gr001ed LockedDocument19 pages01889gr001ed LockedEricPas encore d'évaluation
- Chapitre 6-Satibilité Dynamique RE-Master-2Document13 pagesChapitre 6-Satibilité Dynamique RE-Master-2djebienPas encore d'évaluation
- Les Moteurs À Courant Continu, Synchrone Et AsynchroneDocument11 pagesLes Moteurs À Courant Continu, Synchrone Et AsynchroneHamza Nabil100% (1)
- DC22 Machine Synchrone +vectoriel 2019Document12 pagesDC22 Machine Synchrone +vectoriel 2019MuhammedPas encore d'évaluation
- Technologie Moteurs Asynchrones (Elby)Document56 pagesTechnologie Moteurs Asynchrones (Elby)kouraogoibrahim7104Pas encore d'évaluation
- L'alternateur de VoitureDocument13 pagesL'alternateur de VoitureTom PagniacPas encore d'évaluation
- M13 Programmation, Réglage Et Conduite Des MOCN Version 1-FMDocument211 pagesM13 Programmation, Réglage Et Conduite Des MOCN Version 1-FMAyoub BOUFTINIPas encore d'évaluation
- TP n03 Moteur A Courant Continu Elm s5!20!21 1Document3 pagesTP n03 Moteur A Courant Continu Elm s5!20!21 1Ondjy Manchiny ValmirPas encore d'évaluation
- Cours Et Exercices - Moteurs-Pas-A-PasDocument3 pagesCours Et Exercices - Moteurs-Pas-A-Paskada saiPas encore d'évaluation
- III-Constitution de La Turbine À GazDocument5 pagesIII-Constitution de La Turbine À GazAli AlilouPas encore d'évaluation
- Turbomachines 1 - Chapitre 2Document51 pagesTurbomachines 1 - Chapitre 2Bilal Bouakrif100% (4)