Vous aimerez peut-être aussi
- SE2I ROBOTIQUE Principe ServomoteurDocument2 pagesSE2I ROBOTIQUE Principe ServomoteurabdelwahadPas encore d'évaluation
- Arduino 4Document24 pagesArduino 4ELFargaliMohamedPas encore d'évaluation
- Les Types de Moteurs: Réalisés ParDocument12 pagesLes Types de Moteurs: Réalisés Parnadhemsassi79Pas encore d'évaluation
- Variateur de Vitesse Pour Moteur À Courant Continu Par PIC16F876 en MLI (PWM) 12V PDFDocument15 pagesVariateur de Vitesse Pour Moteur À Courant Continu Par PIC16F876 en MLI (PWM) 12V PDFcherif slimPas encore d'évaluation
- Mme ImenDocument38 pagesMme ImenMejri AkremPas encore d'évaluation
- Command Machin ElectrDocument28 pagesCommand Machin ElectrAhmed KramdiPas encore d'évaluation
- Fonctionnement Du Servomoteur Et Interface Avec ArduinoDocument11 pagesFonctionnement Du Servomoteur Et Interface Avec ArduinoEmmanuel Maï100% (1)
- Variateur de VitesseDocument10 pagesVariateur de VitesseKossayEssidPas encore d'évaluation
- Cablage Moteur AsynchroneDocument11 pagesCablage Moteur AsynchroneAyb Cha Kri100% (1)
- VARIATEUR - DE - VITESSE - Doc ProfDocument3 pagesVARIATEUR - DE - VITESSE - Doc Profsaid100% (2)
- TP6 VerinDocument8 pagesTP6 Verinchaimaa jazouliPas encore d'évaluation
- Connaitre La Position D'un Servo MoteurDocument8 pagesConnaitre La Position D'un Servo MoteurAnonyme AnonymesPas encore d'évaluation
- TP1: Variateur de Vitesse D'un Moteur Asynchrone Avec: (Labview + Arduino)Document7 pagesTP1: Variateur de Vitesse D'un Moteur Asynchrone Avec: (Labview + Arduino)achrafPas encore d'évaluation
- Simulation Proteus IsisDocument22 pagesSimulation Proteus IsisMohammed JazouuliPas encore d'évaluation
- TP Etude D'équipementsDocument12 pagesTP Etude D'équipementsZAKARIA BDRPas encore d'évaluation
- Robot Suiveur de LigneDocument22 pagesRobot Suiveur de Ligneridha annabi100% (1)
- TD VariateurDocument9 pagesTD VariateurnawzatPas encore d'évaluation
- TP Commande Des MachinesDocument21 pagesTP Commande Des MachinesTa Divika Hasterivy100% (1)
- Exposée ArduinoDocument15 pagesExposée ArduinoIheb Hamed100% (1)
- CHP 2Document16 pagesCHP 2zakaria khatirPas encore d'évaluation
- Exercices de Programmation TIA Step7Document4 pagesExercices de Programmation TIA Step7faqdani75% (4)
- Automatisation Par API ZelioDocument24 pagesAutomatisation Par API ZelioDjamal Zenaidi67% (3)
- Variateur ABBDocument21 pagesVariateur ABBnawzatPas encore d'évaluation
- Pas A PasDocument28 pagesPas A PasMejri AkremPas encore d'évaluation
- Cours CMEDocument39 pagesCours CMEHaidra HaidraPas encore d'évaluation
- TCH Akh ChibDocument4 pagesTCH Akh ChibAbdou ChaouiPas encore d'évaluation
- Commande Variation de Vitesse Machine AsynchroneDocument64 pagesCommande Variation de Vitesse Machine AsynchroneOliver TwistePas encore d'évaluation
- Banc Depart Moteur Schneider Electric - CompressDocument7 pagesBanc Depart Moteur Schneider Electric - CompressMohamed ReGaiegPas encore d'évaluation
- Variateurs de VitesseDocument17 pagesVariateurs de VitesseYanis Kemoun0% (1)
- Flyer Servovariateur I700 Cabinet FRDocument2 pagesFlyer Servovariateur I700 Cabinet FRmehdiPas encore d'évaluation
- Document Variateur de VitesseDocument10 pagesDocument Variateur de VitesseMohamed FETTAHPas encore d'évaluation
- Techniques de La Commande ÉlectriqueDocument44 pagesTechniques de La Commande ÉlectriqueAli MEDJGHOU100% (1)
- Robot Suiveur de Ligne: Sarah El Mouftari Roxane Assana Jérémy Brandt Amaury DebruyckereDocument22 pagesRobot Suiveur de Ligne: Sarah El Mouftari Roxane Assana Jérémy Brandt Amaury DebruyckereAchraf AlaouiPas encore d'évaluation
- Compte Rendue Moteur Pas À PasDocument23 pagesCompte Rendue Moteur Pas À PasWided Maghraoui100% (2)
- Laboratoire 1Document9 pagesLaboratoire 1Jean-Pierre AwuPas encore d'évaluation
- GnkincteDocument20 pagesGnkinctesalahouchenesalahPas encore d'évaluation
- Etudier Et Mettre en Œuvre Un Variateur de Vitesse. Banc Variation de Vitesse Altivar 71 Avec Frein À PoudreDocument23 pagesEtudier Et Mettre en Œuvre Un Variateur de Vitesse. Banc Variation de Vitesse Altivar 71 Avec Frein À PoudreNour ouzeriPas encore d'évaluation
- Exercice 1: Direction Assistée Électrique.: FonctionnementDocument4 pagesExercice 1: Direction Assistée Électrique.: FonctionnementHassan AbaPas encore d'évaluation
- PJ 783Document11 pagesPJ 783art67127Pas encore d'évaluation
- TP2 Commande de Pont en HDocument3 pagesTP2 Commande de Pont en Hsalahkr444Pas encore d'évaluation
- SurveillanceDocument41 pagesSurveillanceBoukhrisse HamzaPas encore d'évaluation
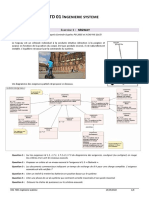
- ANA TD01 - Ingénierie SystèmeDocument8 pagesANA TD01 - Ingénierie Systèmebijhou mcPas encore d'évaluation
- ISILF05 P 157 GrammeDocument15 pagesISILF05 P 157 GrammeaminhardPas encore d'évaluation
- 3IL Stewart Dossier TechniqueDocument11 pages3IL Stewart Dossier TechniqueHoussem RadhouanePas encore d'évaluation
- CR Schema YOUNESS HRIDADocument4 pagesCR Schema YOUNESS HRIDAZAAIRA HAMZAPas encore d'évaluation
- Contrôle Vectoriel À Flux OrientéDocument61 pagesContrôle Vectoriel À Flux OrientéAllal BOUZID90% (20)
- Chaine D'action ÉlectriqueDocument34 pagesChaine D'action ÉlectriqueBodelvi KayiPas encore d'évaluation
- TP Moteur CC Pilote EleveDocument4 pagesTP Moteur CC Pilote Eleveladabd2Pas encore d'évaluation
- Mémoire Badri 2016 Fin0Document65 pagesMémoire Badri 2016 Fin0PFEPas encore d'évaluation
- Manuel TP 1Document47 pagesManuel TP 1Mohamed Amine Zouhri100% (3)
- 031-Cours Fonctionnement Chariot Elevateur PDFDocument20 pages031-Cours Fonctionnement Chariot Elevateur PDFIlyass Hani100% (1)
- Servo ACDocument22 pagesServo ACHãŸę ŤëmPas encore d'évaluation
- 12 PWM 2Document11 pages12 PWM 2Ibrahim BahloulPas encore d'évaluation
- Inversion Moteur CC PDFDocument3 pagesInversion Moteur CC PDFنضال العويPas encore d'évaluation
- Transformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiqueD'EverandTransformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiquePas encore d'évaluation
- A propos du Digital!: Le digital pour tous! Le numérique en questions/réponses pour le modélisme ferroviaireD'EverandA propos du Digital!: Le digital pour tous! Le numérique en questions/réponses pour le modélisme ferroviaireÉvaluation : 3.5 sur 5 étoiles3.5/5 (3)
- Liberté de l'Énergie: Le Guide Étape Par Étape le Plus Simplifié Pour Installer et Entretenir en Toute Sécurité Votre Propre Système d'Énergie Solaire Pour les Petites Maisonsv et les CabanesD'EverandLiberté de l'Énergie: Le Guide Étape Par Étape le Plus Simplifié Pour Installer et Entretenir en Toute Sécurité Votre Propre Système d'Énergie Solaire Pour les Petites Maisonsv et les CabanesPas encore d'évaluation
- Photovoltaïque | pas à pas: Le guide pratique pour débutants pour la conception d'une installation PVD'EverandPhotovoltaïque | pas à pas: Le guide pratique pour débutants pour la conception d'une installation PVPas encore d'évaluation
- Servo Sous FlowcodeDocument10 pagesServo Sous Flowcodezouaoua slimanePas encore d'évaluation
- Robot Suiveur D'objet Coloré Par Webcam Montée Sur ServomoteurDocument43 pagesRobot Suiveur D'objet Coloré Par Webcam Montée Sur Servomoteurzouaoua slimanePas encore d'évaluation
- Bidouille ServoDocument7 pagesBidouille Servozouaoua slimanePas encore d'évaluation
- 11 ServoelectDocument38 pages11 Servoelectzouaoua slimanePas encore d'évaluation
- Bases de La Technique D'entraînement Par Servomoteur: Livre D'exercices TP 1421Document22 pagesBases de La Technique D'entraînement Par Servomoteur: Livre D'exercices TP 1421zouaoua slimanePas encore d'évaluation
- ServocamDocument3 pagesServocamzouaoua slimanePas encore d'évaluation
- Interface Servomoteur IR Pour RCX: LoisirsDocument7 pagesInterface Servomoteur IR Pour RCX: Loisirszouaoua slimanePas encore d'évaluation
- Kit ServomoteurDocument3 pagesKit Servomoteurzouaoua slimanePas encore d'évaluation
- 20 El 21-07-2005Document122 pages20 El 21-07-2005zouaoua slimanePas encore d'évaluation
- Brochure D Information Formation Et Examen en Protection Cathodique n2 2017Document3 pagesBrochure D Information Formation Et Examen en Protection Cathodique n2 2017zouaoua slimanePas encore d'évaluation
- 765 SolcapteursbrushlessDocument4 pages765 Solcapteursbrushlesszouaoua slimanePas encore d'évaluation
- VSM Ev91Document21 pagesVSM Ev91zouaoua slimanePas encore d'évaluation
- Procedure Interne Tste HydrosatiqueDocument1 pageProcedure Interne Tste Hydrosatiquezouaoua slimanePas encore d'évaluation
- Centre de Recherche Scientifique Et Technique en Soudage Et ControleDocument1 pageCentre de Recherche Scientifique Et Technique en Soudage Et Controlezouaoua slimanePas encore d'évaluation
- 12953-1 Page 8Document26 pages12953-1 Page 8zouaoua slimanePas encore d'évaluation
- Norm 3 FR111Document6 pagesNorm 3 FR111zouaoua slimanePas encore d'évaluation
- Armoire TGBTDocument4 pagesArmoire TGBTzouaoua slimane100% (1)
- Cours de Controle de RevetementDocument37 pagesCours de Controle de Revetementzouaoua slimanePas encore d'évaluation
- Contrôle de Corrosion InterneDocument1 pageContrôle de Corrosion Internezouaoua slimanePas encore d'évaluation
- Capteurs Et Detecteurs IndustrielsDocument14 pagesCapteurs Et Detecteurs Industrielszouaoua slimanePas encore d'évaluation
- Centre de Recherche Scientifique Et Technique en Soudage Et ControleDocument1 pageCentre de Recherche Scientifique Et Technique en Soudage Et Controlezouaoua slimanePas encore d'évaluation
- Cours CNDDocument104 pagesCours CNDzouaoua slimanePas encore d'évaluation
- Cours CNDDocument104 pagesCours CNDzouaoua slimanePas encore d'évaluation
- Analyse Vibratoire Serra PDFDocument33 pagesAnalyse Vibratoire Serra PDFaliPas encore d'évaluation
- Les PneusDocument34 pagesLes Pneusnissrine hammamPas encore d'évaluation
- Installation ET Maintenance Des Pompes ImmergeesDocument42 pagesInstallation ET Maintenance Des Pompes ImmergeesYousra AdjeriouPas encore d'évaluation
- Cat 432F2bDocument20 pagesCat 432F2bPatrick MartinPas encore d'évaluation
- Giant Roam Disc 4 FR FR 2683Document1 pageGiant Roam Disc 4 FR FR 2683nguyenPas encore d'évaluation
- AlternateurDocument3 pagesAlternateurassoua kloliè konanPas encore d'évaluation
- Fiat Sofim MR Moteur 8140.27 V1Document93 pagesFiat Sofim MR Moteur 8140.27 V1john100% (3)
- Liste Des Points À InspecterDocument7 pagesListe Des Points À Inspecterkhirane marouanePas encore d'évaluation
- Autoradio Joying Espace4 Phase2 V1 FRDocument12 pagesAutoradio Joying Espace4 Phase2 V1 FRAngelo100% (1)
- Commande Des Machines Electriques: 3éme Année Licence ElectrotechniqueDocument60 pagesCommande Des Machines Electriques: 3éme Année Licence ElectrotechniqueIMAD ABOUDRARPas encore d'évaluation
- Velo MetreDocument4 pagesVelo MetreylecorrePas encore d'évaluation
- LECTRONIQUE DE PUISSANCE - ExercicesDocument11 pagesLECTRONIQUE DE PUISSANCE - ExercicesMarouan EladiPas encore d'évaluation
- B810 - Manuel de Pièces DétachéesDocument438 pagesB810 - Manuel de Pièces DétachéesCML GalloPas encore d'évaluation
- Rapport de Stage Loubna3Document32 pagesRapport de Stage Loubna3شاكر عبد الصمد50% (2)
- Tableau Des Infractions A La Circulation Routiere Et Taux D-1Document5 pagesTableau Des Infractions A La Circulation Routiere Et Taux D-1Thierry Gnasiri Godwe HinsouPas encore d'évaluation
- TdengrenageDocument5 pagesTdengrenageImane FarrassPas encore d'évaluation
- Freins: CaractéristiquesDocument9 pagesFreins: Caractéristiquestoni13021302Pas encore d'évaluation
- (34 48) D0012 Plantain InstructionDocument13 pages(34 48) D0012 Plantain Instructionmelissa belliotPas encore d'évaluation
- TP MasDocument9 pagesTP MasDjalal Eddine HammachiPas encore d'évaluation
- Depose Radiateur Audi A4 b8Document7 pagesDepose Radiateur Audi A4 b8MehdiPas encore d'évaluation
- Nugelec BaasDocument12 pagesNugelec BaasTakriti SalaheddinePas encore d'évaluation
- DIAG01MPF Automatisme Portail Battant ATLAS LEXDocument40 pagesDIAG01MPF Automatisme Portail Battant ATLAS LEXChrisfrecPas encore d'évaluation
- Devoir de Synthèse N°3 - Technologie - 1ère AS (2007-2008) Mme Toumi Imen Système SertisseuseDocument7 pagesDevoir de Synthèse N°3 - Technologie - 1ère AS (2007-2008) Mme Toumi Imen Système SertisseuseMounir Ben AouidhaPas encore d'évaluation
- Orus Etimes City 8000hDocument52 pagesOrus Etimes City 8000hAntonio RiujanoPas encore d'évaluation
- ON-mag 2023-5: Home CinémaDocument106 pagesON-mag 2023-5: Home CinémaON magPas encore d'évaluation
- DEHAYEALESOIRSREAMERSDocument30 pagesDEHAYEALESOIRSREAMERSnicodehayePas encore d'évaluation
- Commande Led Courant ConstantDocument3 pagesCommande Led Courant ConstantdudulemarcPas encore d'évaluation
- PDFDocument250 pagesPDFabdou_scribdPas encore d'évaluation