Vous aimerez peut-être aussi
- TP1-Pendule élastique-2GP-2020-2021 PDFDocument4 pagesTP1-Pendule élastique-2GP-2020-2021 PDFMįÑöu dZ75% (4)
- 1 41MMC - Chap1Document41 pages1 41MMC - Chap1Wael BadriPas encore d'évaluation
- CharpenteDocument56 pagesCharpenteSaid MrfPas encore d'évaluation
- Mef IutDocument11 pagesMef IutBelheziel AekPas encore d'évaluation
- Annales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésD'EverandAnnales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- Chapitre 3 - L'équation de Transport de BoltzmannDocument53 pagesChapitre 3 - L'équation de Transport de BoltzmannMohamed El Hadi RedjaimiaPas encore d'évaluation
- Propagation Des Ondes SismiquesDocument19 pagesPropagation Des Ondes Sismiquesdjeddi mabrouk86% (7)
- Cous MMC Tenseurs Et Contraintes - PPTX - 20240208 - 114138 - 0000Document62 pagesCous MMC Tenseurs Et Contraintes - PPTX - 20240208 - 114138 - 0000Mbaye NDOYEPas encore d'évaluation
- Receuil Sujets Semestre1Document47 pagesReceuil Sujets Semestre1Jacqueline ItopPas encore d'évaluation
- 2021 Fui-Ff S1 Sujet Ecrit de PhysiqueDocument9 pages2021 Fui-Ff S1 Sujet Ecrit de PhysiqueTricePas encore d'évaluation
- Exercices 2Document9 pagesExercices 2brahim_mdPas encore d'évaluation
- Transformation Coordonnees PDFDocument46 pagesTransformation Coordonnees PDFBassem BhiriPas encore d'évaluation
- Ondes Élastiques Dans Les SolidesDocument30 pagesOndes Élastiques Dans Les SolidesmohamedouffaPas encore d'évaluation
- PR InstabDocument8 pagesPR InstabArtichaut Du 63Pas encore d'évaluation
- Plasticite 3DDocument106 pagesPlasticite 3DwalidnasriPas encore d'évaluation
- Chap1 Tourki2013Document28 pagesChap1 Tourki2013MD HM BCPas encore d'évaluation
- PH TP12a Oscill Horizontal CorrectDocument4 pagesPH TP12a Oscill Horizontal CorrectfatihamPas encore d'évaluation
- Chapitre 2 MMCDocument9 pagesChapitre 2 MMCBrahim SardouPas encore d'évaluation
- Méthode de MohrDocument17 pagesMéthode de MohrDragana Jevremovic50% (2)
- Cours ELASTICITE DEBIH PDFDocument30 pagesCours ELASTICITE DEBIH PDFallaouiPas encore d'évaluation
- 1.vibrations Des PoutresDocument107 pages1.vibrations Des Poutrestouffaha moussaPas encore d'évaluation
- Examen de Techniques Expérimentales Avancées. 1 Étude Par Diffusion Acoustique D Un Écoulement de CouetteDocument6 pagesExamen de Techniques Expérimentales Avancées. 1 Étude Par Diffusion Acoustique D Un Écoulement de CouettefatehPas encore d'évaluation
- TD NonlDocument12 pagesTD NonlmimilaclassePas encore d'évaluation
- Construction ParasismiqueDocument12 pagesConstruction ParasismiqueAmir BennamounPas encore d'évaluation
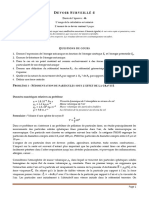
- Devoir Surveillé de Physique N°3 (3 H 30) : Exercice 1: Questions de CoursDocument11 pagesDevoir Surveillé de Physique N°3 (3 H 30) : Exercice 1: Questions de CoursRussel YeoPas encore d'évaluation
- Exos M2Document4 pagesExos M2Yves-rolandN'guessanPas encore d'évaluation
- Tds Chap1 Meca1 StudentsDocument2 pagesTds Chap1 Meca1 Studentsnelsonfosso910Pas encore d'évaluation
- MefDocument8 pagesMefDjamelNasratPas encore d'évaluation
- AnisotropieDocument12 pagesAnisotropieAlbert Braulio VitePas encore d'évaluation
- PSI_PHYSIQUE_X_1_2020.enonce (1)Document10 pagesPSI_PHYSIQUE_X_1_2020.enonce (1)lesdaoudi5Pas encore d'évaluation
- Chapitre IIIDocument21 pagesChapitre IIIelggrayan2001Pas encore d'évaluation
- Cours MMC VF Ucao CorrigéDocument133 pagesCours MMC VF Ucao Corrigénarcisse100% (1)
- Sujets Examens Vibrations Et Ondes Avant 2005Document26 pagesSujets Examens Vibrations Et Ondes Avant 2005Wassim NostraPas encore d'évaluation
- Chapitre1 MMCDocument12 pagesChapitre1 MMCAhmed mewloud El HassenPas encore d'évaluation
- Cours MMC VF UcaoDocument133 pagesCours MMC VF UcaonarcissePas encore d'évaluation
- Hooke1617 PDFDocument5 pagesHooke1617 PDFABD ELBASSETPas encore d'évaluation
- Cours Mécanique Analytique Et VibrationsDocument39 pagesCours Mécanique Analytique Et Vibrationsdaongocha108100% (1)
- MécaniqueComposites Chapitre 9 PDFDocument39 pagesMécaniqueComposites Chapitre 9 PDFSakazoki TchjiPas encore d'évaluation
- DS Mécanique 2024Document9 pagesDS Mécanique 2024Mi LasPas encore d'évaluation
- Cénimatique Des Milieux ContinusDocument91 pagesCénimatique Des Milieux ContinusMohamed AfqirPas encore d'évaluation
- Angle de FrottementDocument7 pagesAngle de FrottementMohamedAhfourPas encore d'évaluation
- Systemes 1ddlDocument21 pagesSystemes 1ddlYoucef BenhalilemPas encore d'évaluation
- TP MDM Chapitre IIDocument4 pagesTP MDM Chapitre IItadjine marouanePas encore d'évaluation
- Cour de Cristallographie 2013-2014Document83 pagesCour de Cristallographie 2013-2014Abderrahman Kalout100% (4)
- Cours AnalysevectorielleDocument14 pagesCours AnalysevectorielleAnonymous TlGnQZv5d7Pas encore d'évaluation
- Mini Projet-5Document4 pagesMini Projet-5You NesPas encore d'évaluation
- TD N°02-Vm-20-21Document8 pagesTD N°02-Vm-20-21mahdiPas encore d'évaluation
- TD NonlDocument12 pagesTD NonlsidiPas encore d'évaluation
- MMC TD4 2020allDocument4 pagesMMC TD4 2020allskipperPas encore d'évaluation
- CFM2007 0324Document6 pagesCFM2007 0324Abdelkader RabahPas encore d'évaluation
- MSD 2005 JuinDocument3 pagesMSD 2005 JuinMohamed Youssef RedouanePas encore d'évaluation
- Exercices de Réfraction Des Ondes Dans Les Fluides - EnoncésDocument7 pagesExercices de Réfraction Des Ondes Dans Les Fluides - EnoncésScribd ReaderPas encore d'évaluation
- TD2-tenseur DeformationDocument3 pagesTD2-tenseur Deformationalaa khabthaniPas encore d'évaluation
- Ef4 - ch5 - Copie PDFDocument10 pagesEf4 - ch5 - Copie PDFSid'ahmd Sbai0% (1)
- Cours de Statistiques DescriptivesDocument43 pagesCours de Statistiques DescriptivesDantedebroca DantePas encore d'évaluation
- Corrige Type Groupe 8Document13 pagesCorrige Type Groupe 8Gilchrist LEGBAPas encore d'évaluation
- Projet Bois G5 - 01 Permis PDFDocument4 pagesProjet Bois G5 - 01 Permis PDFGilchrist LEGBAPas encore d'évaluation
- Méthode Des Tranches de FelleniusDocument3 pagesMéthode Des Tranches de FelleniusGilchrist LEGBAPas encore d'évaluation
- Treiils RDMDocument8 pagesTreiils RDMGilchrist LEGBAPas encore d'évaluation
- STATIQUE DES FLUIDES ProfDocument12 pagesSTATIQUE DES FLUIDES ProfAbdoulnassirou BassongouPas encore d'évaluation
- Résistance Des Structures - 20230109Document190 pagesRésistance Des Structures - 20230109arcPas encore d'évaluation
- Moteur À COURANT CONTINUDocument3 pagesMoteur À COURANT CONTINUAladji SyPas encore d'évaluation
- NF EN 13480-4 AC2 Tuyauterie Industrielle Métallique Fabrication Et InstallationDocument6 pagesNF EN 13480-4 AC2 Tuyauterie Industrielle Métallique Fabrication Et InstallationaminePas encore d'évaluation
- EP08150369NWA1Document16 pagesEP08150369NWA1Omar SelamiPas encore d'évaluation
- Etude Expérimentale en Vue D'un Modèle de Comportement Pour La Vase de TunisDocument12 pagesEtude Expérimentale en Vue D'un Modèle de Comportement Pour La Vase de TunisGeotech NicalPas encore d'évaluation
- Ex 21 1 Boule de Billard Sur Table TournanteDocument5 pagesEx 21 1 Boule de Billard Sur Table TournanteDIBIPas encore d'évaluation
- Controle Métaux PDFDocument15 pagesControle Métaux PDFfatimazahra kheraziPas encore d'évaluation
- RAt-DDS 2015 PDFDocument1 pageRAt-DDS 2015 PDFaaerPas encore d'évaluation
- AzziSmail AzziBDocument69 pagesAzziSmail AzziBOubachir Mi DouPas encore d'évaluation
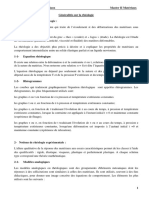
- Généralités Sur La RhéologieDocument5 pagesGénéralités Sur La Rhéologiezoom scaipPas encore d'évaluation
- CHapitre2 - Travaux Dirigés - Contact de HertzDocument3 pagesCHapitre2 - Travaux Dirigés - Contact de HertzHamza MokhtariPas encore d'évaluation
- 9327 Controle Des Engrenages EnspsDocument8 pages9327 Controle Des Engrenages EnspsKouchad FouadPas encore d'évaluation
- 07 ADocument4 pages07 Aapi-3767116100% (1)
- Rapport PFE FinalDocument87 pagesRapport PFE Finalmoez ben youssef100% (1)
- Acoustique, Chapitre 2Document586 pagesAcoustique, Chapitre 2Ali KHALFAPas encore d'évaluation
- Injection Directe Essence PDFDocument7 pagesInjection Directe Essence PDFBa Hamzik HP100% (1)
- 01-EC225 LP - ATA 00 - Premier Contact Avec L'hélicoptère - T1 - FRDocument44 pages01-EC225 LP - ATA 00 - Premier Contact Avec L'hélicoptère - T1 - FRLung KhanPas encore d'évaluation
- PiquageDocument4 pagesPiquagefanfan.boreauPas encore d'évaluation
- Généralités: Selon ISO 724Document3 pagesGénéralités: Selon ISO 724M.Khaled GdouraPas encore d'évaluation
- TMF Corrigé TD Tuyère Et AubeDocument6 pagesTMF Corrigé TD Tuyère Et AubeAnonymous 80p9OVPas encore d'évaluation
- Présentation Étude PontDocument34 pagesPrésentation Étude PontIlyes TakellaletPas encore d'évaluation
- Pipe SizingDocument4 pagesPipe SizingmarwitosPas encore d'évaluation
- TP Pendule SimpleDocument6 pagesTP Pendule Simpleben fayssal100% (1)
- Pompe TriplexDocument23 pagesPompe TriplexBac mathPas encore d'évaluation
- Sécurité Sur Les Convoyeurs À Courroie PDFDocument85 pagesSécurité Sur Les Convoyeurs À Courroie PDFChristophe Schwartz100% (1)
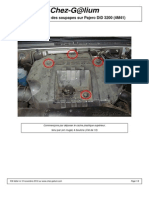
- Réglage Du Jeu Des Soupapes Sur Pajero DiD 3200 (4M41)Document9 pagesRéglage Du Jeu Des Soupapes Sur Pajero DiD 3200 (4M41)Maroselli CharlesPas encore d'évaluation
- Support de Cours DYNAMIQUE CopieDocument14 pagesSupport de Cours DYNAMIQUE CopieDjeti LabantePas encore d'évaluation
- M13-Etude Coffrage Ferraillage Éléments porteur-BTP-TDBDocument71 pagesM13-Etude Coffrage Ferraillage Éléments porteur-BTP-TDBDriss Benomar100% (13)
- Mathieu Le Nel 33359 Kergourlay Le-Nel Pince-Hgw Notice-CalculDocument15 pagesMathieu Le Nel 33359 Kergourlay Le-Nel Pince-Hgw Notice-CalculMouhsineAtbPas encore d'évaluation
- Le profilage au service du football: Démarche scientifique pour un recrutement et entraînements optimisésD'EverandLe profilage au service du football: Démarche scientifique pour un recrutement et entraînements optimisésPas encore d'évaluation
- Améliorer votre mémoire: Un Guide pour l'augmentation de la puissance du cerveau, utilisant des techniques et méthodesD'EverandAméliorer votre mémoire: Un Guide pour l'augmentation de la puissance du cerveau, utilisant des techniques et méthodesÉvaluation : 5 sur 5 étoiles5/5 (2)
- Secrets ancestraux d'un maître guérisseur: Un sceptique occidental, un maître oriental et les plus grands secrets de la vieD'EverandSecrets ancestraux d'un maître guérisseur: Un sceptique occidental, un maître oriental et les plus grands secrets de la vieÉvaluation : 5 sur 5 étoiles5/5 (2)
- L'Art de la guerre: Traité de stratégie en 13 chapitres (texte intégral)D'EverandL'Art de la guerre: Traité de stratégie en 13 chapitres (texte intégral)Évaluation : 4 sur 5 étoiles4/5 (3032)
- Transformez votre vie: Utilisez le pouvoir créateur qui est en vous pour construire votre vie à l'image de ce que vous voulez qu'elle soitD'EverandTransformez votre vie: Utilisez le pouvoir créateur qui est en vous pour construire votre vie à l'image de ce que vous voulez qu'elle soitÉvaluation : 4 sur 5 étoiles4/5 (14)
- Harmonisation Energétique des Personnes: Manuel de Curothérapie 2020D'EverandHarmonisation Energétique des Personnes: Manuel de Curothérapie 2020Évaluation : 4 sur 5 étoiles4/5 (8)
- La vie des abeilles: Prix Nobel de littératureD'EverandLa vie des abeilles: Prix Nobel de littératureÉvaluation : 4 sur 5 étoiles4/5 (41)
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsD'EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Manuel de fabrication du savon: Je fabrique mes savons facilementD'EverandManuel de fabrication du savon: Je fabrique mes savons facilementÉvaluation : 5 sur 5 étoiles5/5 (4)
- Harmonisation Energétique des Lieux: Habitat et haut-lieux sacrés 2020D'EverandHarmonisation Energétique des Lieux: Habitat et haut-lieux sacrés 2020Évaluation : 2.5 sur 5 étoiles2.5/5 (3)
- Approvisionnement et traitement de l’eau: Les Grands Articles d'UniversalisD'EverandApprovisionnement et traitement de l’eau: Les Grands Articles d'UniversalisPas encore d'évaluation
- 160 ressources pour se lancer dans la vidéo quand on n’y connait rienD'Everand160 ressources pour se lancer dans la vidéo quand on n’y connait rienPas encore d'évaluation
- 20 Véritables remèdes de nos grands-mères pour maigrir vite et enfin perdre du poidsD'Everand20 Véritables remèdes de nos grands-mères pour maigrir vite et enfin perdre du poidsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Enseigner une Langue Etrangère Par l’Apprentissage HybrideD'EverandEnseigner une Langue Etrangère Par l’Apprentissage HybridePas encore d'évaluation
- Théorie relative de la musique: Maîtriser le mouvement par la logique des intervallesD'EverandThéorie relative de la musique: Maîtriser le mouvement par la logique des intervallesÉvaluation : 4 sur 5 étoiles4/5 (1)
- Anatomie & 100 étirements essentiels: Techniques, Bénéfices attendus, Précautions à prendre, Conseils, Tableaux de séries, DouleursD'EverandAnatomie & 100 étirements essentiels: Techniques, Bénéfices attendus, Précautions à prendre, Conseils, Tableaux de séries, DouleursPas encore d'évaluation
- Semer avec succès pour rassembler avec abundance. Jardin organique et synergique: Calcul des meilleurs jours pour l'ensemencement de chaque légumeD'EverandSemer avec succès pour rassembler avec abundance. Jardin organique et synergique: Calcul des meilleurs jours pour l'ensemencement de chaque légumePas encore d'évaluation
- Cahier de jeux de stimulation cognitive: Sujets Alzheimer, désorientés, démences, amnésiesD'EverandCahier de jeux de stimulation cognitive: Sujets Alzheimer, désorientés, démences, amnésiesPas encore d'évaluation
- Un régime quantiqueD'EverandUn régime quantiqueÉvaluation : 5 sur 5 étoiles5/5 (1)
- Puissance naturelles - Que faire si votre "meilleure partie" est en grève?: Puissance naturelles-améliorer les recours pour augmenter la virilité de la capacité à obtenir une érection de fermetéD'EverandPuissance naturelles - Que faire si votre "meilleure partie" est en grève?: Puissance naturelles-améliorer les recours pour augmenter la virilité de la capacité à obtenir une érection de fermetéÉvaluation : 3.5 sur 5 étoiles3.5/5 (3)
- Le B.A.-Ba de la communication: Comment convaincre, informer, séduire ?D'EverandLe B.A.-Ba de la communication: Comment convaincre, informer, séduire ?Évaluation : 3 sur 5 étoiles3/5 (1)
- Cancer - Leucémie: Et autres maladies apparemment incurables, mais guérissables avec des moyens naturelsD'EverandCancer - Leucémie: Et autres maladies apparemment incurables, mais guérissables avec des moyens naturelsPas encore d'évaluation
- L'Art de La Magie au Bougie Wicca: Le Guide du Débutant à la Pratique de la Magie au Bougie de WiccaD'EverandL'Art de La Magie au Bougie Wicca: Le Guide du Débutant à la Pratique de la Magie au Bougie de WiccaÉvaluation : 3 sur 5 étoiles3/5 (1)
- Automatique: Les Grands Articles d'UniversalisD'EverandAutomatique: Les Grands Articles d'UniversalisPas encore d'évaluation