Chapitre 4 Automate programmable industriel
4.1 Introduction
Depuis leurs apparitions, les automates programmables se sont répondus très rapidement dans
l’industrie au point de représenter aujourd’hui plus de la moitié des équipements
informatiques qui sont utilisées pour ce type d’application. Ce succès des API est dû en
grande partie à leurs faible coût, à la facilité avec laquelle ils peuvent être mis en œuvre par
du personnel non informaticien et à la leurs pilotage en ambiance industrielle et en temps réel
des procédés logiques séquentiels et combinatoires.
Les API sont en générale conçus dès l’origine pour fonctionner en milieu industriel, avec toutes
les protections nécessaires contre l’environnement, et avec les interfaces adaptées aux capteurs et
aux actionneurs les plus courants.
4.2 Architecture d’un API
L’automate programmable est un système de traitement logique d’information dont le pro-
gramme de fonctionnement est effectué à partir d’instructions établies en fonction du processus à
réaliser.
Notes Cours Automatismes Industriels 44 Tahar Askri
Figure 4-1- API TSX 37-21
1 Bac à 3 emplacements, intégrant l’alimentation, le processeur et sa mémoire
de base.
2 Trou de fixation de l’automate.
3 Bloc de visualisation centralisée.
4 Prise terminal TER.
5 Prise de dialogue opérateur AUX.
6 Emplacement pour une carte d’extension mémoire. En l’absence de carte, cet
emplacement est équipé d’un cache qu’il est obligatoire de maintenir en place;
son extraction provoquant l’arrêt de l’automate.
7 Trappe d’accès aux bornes d’alimentation.
8 Etiquette à renseigner pour le changement de la pile.
9 Bornes d’alimentation.
10 Emplacement pour un coupleur de communication.
11 Trappe d’accès à la pile optionnelle et au commutateur de protection en écriture
du système d’exploitation.
12 Connecteur de raccordement du mini-bac d’extension, protégé de base par un
cache amovible.
13 Dispositif pour montage sur profilé DIN.
Notes Cours Automatismes Industriels 45 Tahar Askri
Le schéma simplifié de la structure interne d'un automate est donné par la figure 4.2. Comme
pour un microcontrôleur ou un système à microprocesseur, on remarque la présence d'un bus de
données sur lequel sont reliées la mémoire données, la mémoire programme et les périphériques
(timers, compteurs, périphériques de communication). Cette ressemblance avec la structure du
microcontrôleur est normale, comme le processeur étant au cœur de l'automate.
Figure 4-2- La structure interne d'un automate
Les API comportent essentiellement :
Partie alimentation
L’unité centrale
La mémoire
Interfaces d’entrées/sorties
4.2.1 L’alimentation
Ce module génère l’ensemble des tensions nécessaires au bon fonctionnement de l’automatisme.
L'alimentation intégrée dans l'API, fournit à partir des tensions usuelles des réseaux (380, 220,
110, 48, 24V) les tensions continues nécessaires au fonctionnement des circuits électroniques.
4.2.2 L’unité centrale
Notes Cours Automatismes Industriels 46 Tahar Askri
L’unité centrale est le regroupement du processeur et de la mémoire centrale. Elle commande
l’interprétation et l’exécution des instructions programmes .Les instructions sont effectuées
les unes après les autres, séquencée par une horloge.
Exemple: Si deux actions doivent être simultanées, l'API les traite successivement.
Le microprocesseur réalise toutes les fonctions arithmétique, logiques ET, OU, les fonctions de
temporisation, de comptage, de calcul... à partir d'un programme contenu dans sa mémoire. Il est
connecté aux autres éléments (mémoire et interface E/S) par des liaisons parallèles appelées '
BUS ' qui véhiculent les informations sous forme binaire.
Les Caractéristiques principales d’un microprocesseur sont :
Vitesses de traitement : C'est la vitesse de l'UC pour exécuter 1 K-instructions logiques.
(10 à 20 ms/Kmots).
Temps de réponse : scrutation des entrées, vitesse de traitement et affectation des sorties.
4.2.3 La mémoire
Elle contient sous forme binaire des informations indispensables au bon fonctionnement d’un
automate, et se compose de :
la mémoire programme : où est stocké le langage programme, elle est en général fi-
gée c’est à dire accessible en lecture seulement : ROM (Read Only Memory) :
mémoire morte. Il existe d’autres types de mémoires mortes : l’EPROM mémoires
mortes reprogrammables effacement aux rayons ultra-violets et l’EEPROM mémoires
mortes reprogrammables effacement électrique,
la mémoire des données : dans laquelle on peut lire, écrire et effacer pendant le
fonctionnement, c’est la RAM (Random Acces Memory), c’est une mémoire vive.
La Zone mémoire va permettre de :
recevoir les informations issues des capteurs d’entrées
Notes Cours Automatismes Industriels 47 Tahar Askri
recevoir les informations générées par le processeur et destinées à la commande des
sorties (valeur des compteurs, des temporisations, …)
recevoir et conserver le programme du processus
4.2.4 Interfaces d’entrées/sorties
Les entrées reçoivent des informations en provenance des éléments de détection (capteurs) et
du pupitre opérateur.
Les sorties transmettent des informations aux pré-actionneurs (relais, électrovannes …) et aux
éléments de signalisation (voyants) du pupitre.
4.2.4.1 Interfaces d’entrées :
Elles sont destinées à :
Recevoir l’information en provenance des capteurs
Traiter le signal en le mettant en forme, en éliminant les parasites et en iso-
lant électriquement l’unité de commande de la partie opérative.
4.2.4.2 Interfaces de sorties :
Elles sont destinées à :
Commander les pré-actionneurs et éléments des signalisations du système
Adapter les niveaux de tensions de l’unité de commande à celle de la partie opérative
du système en garantissant une isolation galvanique entre ces dernières.
4.2.4.3 Terminaux de programmation et de réglage
L'API doit permettre un dialogue avec :
Le personnel d'étude et de réalisation pour réaliser la première mise en œuvre (Edition
programme, Transfert, Sauvegarde...)
Notes Cours Automatismes Industriels 48 Tahar Askri
Le personnel de mise au point et de maintenance pour réaliser des opérations sur le
système (Forçage, Visualisation de l'état, Modification de paramètres temporisation,
compteurs....)
Ce dialogue peut être réalisé par :
Une Console : Elle sera utilisée sur site, elle comporte un clavier, un écran de vi-
sualisation et un langage de programmation.
Un Micro-ordinateur avec un logiciel d'assistance à la programmation : Il sera utilisé
hors site. Il comprend plusieurs modules pour permettre l'édition, l'archivage, la mise au
point des applications.
4.3 Principe de fonctionnement
L'automate programmable reçoit les informations relatives à l'état du système, c’est la phase de
détection, et puis commande les pré-actionneurs suivant le programme inscrit dans sa mé-
moire, c’est le traitement logique des informations.
Figure 4-3- Principe de fonctionnement de l’API
4.3.1 La détection
Le capteur fournit au séquenceur, des comptes rendus sur l’état du système. Il convertit les in-
formations physiques de la PO en grandeurs électriques exploitables par le séquenceur. Ils peu-
vent détecter des positions, des pressions, des températures, des vitesses, des
accélérations, des niveaux, des présences, des états...
Notes Cours Automatismes Industriels 49 Tahar Askri
Au delà du simple capteur à contact et à commande mécanique, il existe un grand nombre de
modèles afin de répondre aux multiples problèmes posés.
On distingue tout d’abord les capteurs par le type de signal qu’ils transmettent :
Les capteurs analogiques traduisent des valeurs de positions, de pressions, de
températures ... sous forme d'un signal (tension ou courant) évoluant constamment
entre deux valeurs limites.
Les capteurs numériques transmettent des valeurs numériques précisant des positions,
des pressions,... pouvant être lus soit en parallèle sur plusieurs conducteurs ; soit en
série sur un seul conducteur.
4.3.2 Traitement logique des informations
Le traitement a lieu en quatre phases.
Phase1 : Gestion du système (autocontrôle de l’automate)
Phase2 : Acquisition des entrées: Durant cette phase, les signaux appliqués à
l'interface d'entrée de l'API sont copiés en mémoire dans des emplacements accessibles
au programme et qui correspondent aux variables d'entrée. Les variables d'entrée sont
uniquement accessibles en lecture. Leurs valeurs resteront ainsi inchangées lors des
deux phases suivantes du cycle. En d'autres termes, au moment de l'acquisition des
entrées, l'API "prend une photo" de l'environnement physique.
Phase 3 : traitement des données: c’est une phase d’exécution du programme et de cal-
cul des valeurs de sorties à partir des valeurs stockées en mémoire dans la phase précé-
dente, les résultats des calculs sont ensuite à leur tour stockés en mémoire. Elle se fait
selon trois instructions :
o Lecture du programme (située dans la RAM programme) par l’unité de traitement,
o Lecture des variables (RAM données).
Notes Cours Automatismes Industriels 50 Tahar Askri
o Traitement et écriture des variables dans la RAM données.
Phase 4 : Émission des ordres: Lecture des variables de sorties dans la RAM don-
nées et transfert vers le module des sorties. Les variables de sorties sont affectées à
l'interface de sortie pour pouvoir être appliquées aux pré-actionneurs.
4.3.3 Dialogue d’exploitation
En période d’exploitation, des dialogues homme machine sont nécessaires :
Pour la conduite de la machine,
Pour des réglages,
Pour des dépannages.
Les constituants prévus pour ces dialogues comportent :
Des constituants implantés tels que boutons, voyants, pupitres configurables…
Des terminaux d’exploitation amovibles, pour réglages et démarrages.
4.4 Jeu d'instructions
Le processeur peut exécuter un certain nombre d’opérations logiques; l’ensemble des instruc-
tions booléennes des instructions complémentaires de gestion de programme (saut, mémorisa-
tion, adressage ...) constitue un jeu d’instructions.
Chaque automate possède ses propres jeux d’instructions. Mais par contre, les constructeurs pro-
posent tous une interface logicielle de programmation répondant à la norme CEI1131-3. Cette
norme définit cinq langages de programmation utilisables, qui sont :
Les langages graphiques :
o LD : Ladder Diagram (Diagrammes échelle)
Notes Cours Automatismes Industriels 51 Tahar Askri
o FBD : Function Block Diagram (Logigrammes)
o SFC : Sequential Function Chart (Grafcet)
Les langages textuels :
o IL : Instruction List (Liste d’instructions).
o ST: Structured Text (Texte structuré).
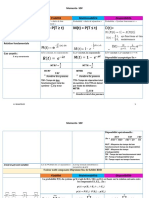
4.4.1 Langage à contact (LD)
Le langage à relais (Ladder Diagram) est basé sur un symbolisme très proche de celui utilisé
pour les schémas de câblage classiques. Les symboles les plus utilisés sont donnés au tableau
suivant :
Désignation Symbole Fonctions
Contact à Contact passant quand l’objet bit qui le pilote est à
l’état 1.
fermeture
Contact à Contact passant quand l’objet bit qui le pilote est à
l’état 0.
Ouverture
Contact à Front montant : détection du passage de 0 à 1 de
l’objet bit qui le pilote.
détection de
front montant
Contact à Front descendant : détection du passage de 1 à 0 de
l’objet bit qui le pilote.
détection de
front
descendant
Bobine directe L’objet bit associé prend la valeur du résultat de la
zone test.
Bobine L’objet bit associé prend la valeur inverse du résul-
tat de la zone test.
Inverse
Bobine L’objet bit associé est mis à 1 lorsque le résultat de
la zone test est à 1.
d’enclenchement
Notes Cours Automatismes Industriels 52 Tahar Askri
Bobine de L’objet bit associé est mis à 0 lorsque le résultat de
la zone test est à 1.
déclenchement
Bobine dièse Proposée en langage Grafcet, utilisée lors de dièse la
programmation des réceptivités associées aux transi-
tions provoque le passage à l'étape suivante.
Tableau 1 : Les éléments graphiques des contacts
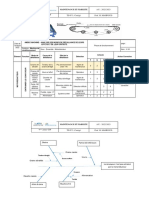
4.4.2 Langage liste d’instructions
Une section écrite en langage liste d’instructions se compose d’une suite d’instruction exécutées
séquentiellement par l’automate.
La figure suivante présente un programme liste d’instruction PL7.
Figure 4-4 Exemple programme IL
Une instruction IL est composée de :
Code instruction : Le code instruction détermine l’opération à exécuter. Il existe 2 types
de codes instructions :
o test, dans laquelle figurent les conditions nécessaires à une action (ex : LD, AND,
OR...),
o action, qui sanctionne le résultat consécutif à un enchaînement de test. (ex: ST,
STN, R, ...).
Notes Cours Automatismes Industriels 53 Tahar Askri
Opérande : Une instruction agit sur un opérande. Cet opérande peut être :
o une entrée/sortie de l’automate (boutons-poussoirs, détecteurs, relais, voyants...),
o une fonction d’automatisme (temporisateurs, compteurs...),
o une opération arithmétique et logique ou une opération de transfert,
o une variable interne de l’automate
Le langage liste d’instructions comporte des instructions :
de test
d’action
sur bloc fonction
Numériques
Les deux tableaux suivant décrivent les instructions de test et d’action.
Désignation Graphisme équivalent Fonctions
LD Le résultat booléen est égal à l’état de l’opérande.
LDN Le résultat booléen est égal à l’état inverse de l’opérande.
LDR Le résultat booléen passe à 1 à la détection du passage de 0
à 1 de l’opérande (front montant).
LDF Le résultat booléen passe à 1 à la détection du passage de 1
à 0 de l’opérande (front descendant).
AND Le résultat booléen est égal au Et logique entre le résultat
booléen de l’instruction précédente et l’état de l’opérande.
ANDN Le résultat booléen est égal au Et logique entre le résultat
booléen de l’instruction précédente et l’état inverse de
l’opérande.
Notes Cours Automatismes Industriels 54 Tahar Askri
ANDR Le résultat booléen est égal au Et logique entre le résultat
booléen de l’instruction précédente, et la détection d’un
front montant de l’opérande (1=front montant).
ANDF Le résultat booléen est égal au Et logique entre le résultat
booléen de l’instruction précédente, et la détection d’un
front descendant de l’opérande (1=front descendant).
OR Le résultat booléen est égal au Ou logique entre le résultat
booléen de l’instruction précédente et l’état de l’opérande.
ORN Le résultat booléen est égal au Ou logique entre le résultat
booléen de l’instruction précédente et l’état inverse de
l’opérande.
ORR Le résultat booléen est égal au Ou logique entre le résultat
booléen de l’instruction précédente, et la détection d’un
front montant de l’opérande (1=front montant).
ORF résultat booléen est égal au Et logique entre le résultat
booléen de l’instruction précédente et l’état de l’opérande.
et la détection d’un front descendant de l’opérande
(1=front descendant).
AND( Et logique (8 niveaux de parenthèses)
OR( Ou logique (8 niveaux de parenthèses)
XOR, - Ou exclusif
XORN,
Notes Cours Automatismes Industriels 55 Tahar Askri
XORR,
XORF
MPS Aiguillage vers des bobines.
MRD MPS (Memory PuSh)
MPP MRD (Memory ReaD)
MPP (Memory PoP)
N - Négation
Tableau 2- Instruction de test
Désignation Graphisme Fonctions
équivalent
ST L’opérande associé prend la valeur du résultat de la zone test.
STN L’opérande associé prend la valeur inverse du résultat de la zone
test.
S L’opérande associé est mis à 1 lorsque le résultat de la zone test
est à 1.
R L’opérande associé est mis à 0 lorsque le résultat de la zone test
est à 1.
JMP - Permet un branchement inconditionnel à une phrase
étiquetée, amont ou aval.
JMPC - Permet un branchement conditionné à un résultat booléen à 1, à
une phrase étiquetée amont ou aval.
JMPCN - Permet un branchement conditionné à un résultat booléen à 0, à
Notes Cours Automatismes Industriels 56 Tahar Askri
une phrase étiquetée amont ou aval.
SRn - Branchement en début de sous-programme.
RET - Retour de sous-programme.
RETC - Retour de sous-programme conditionné à un résultat
booléen à 1.
RETCN - Retour de sous-programme conditionné à un résultat
booléen à 0.
END - Fin de programme.
ENDC - Fin de programme conditionné à un résultat booléen à 1.
ENDCN - Fin de programme conditionné à un résultat booléen à 0.
Tableau 3 Instructions d'action
4.4.3 Exercice d’application :
Traduire les programmes de langage LD en langage IL :
1.
Solution :
LD %I1.0
AND %I1.1
OR %I1.2
ST %Q2.0
2.
Notes Cours Automatismes Industriels 57 Tahar Askri
Solution :
LD %I1.0
AND ( %I1.1
OR %I1.2
)
ST %Q2.0
3.
Solution
LD %I1.0
AND %I1.1
OR(N %I1.2
AND %I1.3
)
ST %Q2.0
4.
LD %I1.0
AND( %I1.1
OR(N %I1.2
AND %M3
)
)
ST %Q2.0
5.
Notes Cours Automatismes Industriels 58 Tahar Askri
LD %I1.1
AND( %I1.2
AND %I1.3
OR(N %I1.5
AND %I1.6
)
AND %I1.4
OR (N %I1.7
AND %I1.8
)
)
ST %Q2.0
6.
LD %I1.0
AND %M0
MPS
AND %I1.1
ST %Q2.0
MRD
AND %I1.2
ST %Q2.1
MRD
AND %I1.3
ST %Q2.2
MPP
AND %I1.4
ST %Q2.3
7.
Notes Cours Automatismes Industriels 59 Tahar Askri
LD %I1.0
MPS
AND %I1.1
MPS
AND( %I1.3
OR %M0
)
ST %Q2.0
MPP
AND %M1
ST %Q2.1
MRD
AND %I1.4
ST %Q2.2
MPP
AND %M10
ST %Q2.3
Notes Cours Automatismes Industriels 60 Tahar Askri
Vous aimerez peut-être aussi
- Python pour Débutants : Guide Complet pour Apprendre la Programmation Pas à PasD'EverandPython pour Débutants : Guide Complet pour Apprendre la Programmation Pas à PasPas encore d'évaluation
- Transformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiqueD'EverandTransformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiquePas encore d'évaluation
- Automates Programmables Industriels (API)Document1 pageAutomates Programmables Industriels (API)Bonheur KambaPas encore d'évaluation
- Chapitre 3. API L2 AutoDocument13 pagesChapitre 3. API L2 Autoأيمن بوهراوةPas encore d'évaluation
- Prof MoussaDocument57 pagesProf MoussaMOURAD NIMIROUPas encore d'évaluation
- API - Cours RésuméDocument32 pagesAPI - Cours RésuméalmahfoudelfadiliPas encore d'évaluation
- Les Automates Programmables IndustrielsDocument22 pagesLes Automates Programmables IndustrielsImene HarbaouiPas encore d'évaluation
- API GénéralitéDocument6 pagesAPI GénéralitéboutalibzinebPas encore d'évaluation
- Cours Automate Programmable Industriel - Les Automates Programmables Industriels API - HTMDocument12 pagesCours Automate Programmable Industriel - Les Automates Programmables Industriels API - HTMlosthell1067% (3)
- CHAPIDocument58 pagesCHAPIHamadi DialloPas encore d'évaluation
- Automates Programmables Industriels (APIDocument19 pagesAutomates Programmables Industriels (APIOtmane ZebraouiPas encore d'évaluation
- AutomateDocument30 pagesAutomatealainPas encore d'évaluation
- Chapitre 3 - Automate Programmable ApiDocument15 pagesChapitre 3 - Automate Programmable ApiMohamed TebriPas encore d'évaluation
- Chap1 APIDocument18 pagesChap1 APIFares ChetouhPas encore d'évaluation
- Chapitre 4Document9 pagesChapitre 4Yacine HidjaPas encore d'évaluation
- Cours API L3Document46 pagesCours API L3Badiel MarcPas encore d'évaluation
- Chapitre I Généralités Sur Les APIDocument11 pagesChapitre I Généralités Sur Les APIFerdis Salah2Pas encore d'évaluation
- Compte Rendu de TP de Logique ProgrammableDocument23 pagesCompte Rendu de TP de Logique ProgrammableYayoune Kholio100% (1)
- Cours 12 - Les APIsDocument13 pagesCours 12 - Les APIsthafsouthkarimaPas encore d'évaluation
- Chp4 AutomatismeDocument15 pagesChp4 AutomatismeAbdl Karim Ben AchourPas encore d'évaluation
- Automate ProgrammableDocument62 pagesAutomate ProgrammableFou FoufaPas encore d'évaluation
- Programmation Des APIDocument79 pagesProgrammation Des APIhaitam Elhansali100% (1)
- Chapitre IDocument6 pagesChapitre Isociété ettrisiti oulad faresPas encore d'évaluation
- GE-S2-M8.1-Automatismes Logiques Industriels-CRS-El HammoumiDocument17 pagesGE-S2-M8.1-Automatismes Logiques Industriels-CRS-El HammoumiElkhalil Ounarhi100% (1)
- Step7 2Document110 pagesStep7 2Kader Arbia100% (2)
- Chapitre 2 Les Automates Programmables Industriels PDFDocument14 pagesChapitre 2 Les Automates Programmables Industriels PDFLéandre Ettekri NDRIPas encore d'évaluation
- Cours - API - Partie IIDocument41 pagesCours - API - Partie IIAkram BENACHOURPas encore d'évaluation
- Les Automates Programmables Industriels (API) - l3 - MT - 2021Document26 pagesLes Automates Programmables Industriels (API) - l3 - MT - 2021manaiadem0Pas encore d'évaluation
- WWW Technologuepro ComDocument7 pagesWWW Technologuepro ComAbderrahim ZeroualiPas encore d'évaluation
- Les Automates Programmables Industriels: I-IntroductionDocument13 pagesLes Automates Programmables Industriels: I-Introductionhamdi jihenPas encore d'évaluation
- Cours Automates Réseaux IndustrielsDocument9 pagesCours Automates Réseaux Industrielspro.kadirciritci7Pas encore d'évaluation
- Cours API & SupervisionDocument155 pagesCours API & SupervisionMos TachePas encore d'évaluation
- Automatisme: L'automate Programmable IndustrielDocument13 pagesAutomatisme: L'automate Programmable IndustrielNacer SbrPas encore d'évaluation
- Cours Emi Micro 2020 (Microp CHP 1,2,3)Document15 pagesCours Emi Micro 2020 (Microp CHP 1,2,3)Youssef El AjraouiPas encore d'évaluation
- Les Automates ProgrammablesDocument71 pagesLes Automates ProgrammablesJoel Edimo100% (1)
- Chapitre 1.APIDocument11 pagesChapitre 1.APIMeriem SaadPas encore d'évaluation
- Pa Chap1Document27 pagesPa Chap1Øuss ÄmāPas encore d'évaluation
- Chapitre Ii: Les Automates Programmables Industriels (Api) : 1-IntroductionDocument22 pagesChapitre Ii: Les Automates Programmables Industriels (Api) : 1-Introductiontr212145Pas encore d'évaluation
- 1-Automate Programmable IndustrielDocument5 pages1-Automate Programmable IndustrielHOUA KOFFI GERAUD JEAN EUDES ESSIPas encore d'évaluation
- Module API Et SupervisionDocument11 pagesModule API Et Supervisiontimo timoPas encore d'évaluation
- Cours API MII SembarquésDocument40 pagesCours API MII SembarquésGabbianimarcoPas encore d'évaluation
- 2015 04 19 Chapitre2 ApiDocument14 pages2015 04 19 Chapitre2 ApiLahouari FatahPas encore d'évaluation
- API EleveDocument6 pagesAPI EleveAFADPas encore d'évaluation
- Chapitre 1Document78 pagesChapitre 1Anis YanisPas encore d'évaluation
- TP Automatisme: M. Khatory Saoussane MAATI / Youssef LIMYDocument24 pagesTP Automatisme: M. Khatory Saoussane MAATI / Youssef LIMYMontasar MbarkiPas encore d'évaluation
- 3 Programmation Des AutomatesDocument54 pages3 Programmation Des AutomatesHamed Assan100% (1)
- Cours Microcontrôleur Microprocesseur 32Document37 pagesCours Microcontrôleur Microprocesseur 32Frank EffeuzePas encore d'évaluation
- API Student3L AutoDocument18 pagesAPI Student3L Automimi mimiPas encore d'évaluation
- CH1 Et 2 API Utilisation Esa CdsDocument36 pagesCH1 Et 2 API Utilisation Esa Cdslebrahmi ahmedPas encore d'évaluation
- Chapitre 2 FINALDocument5 pagesChapitre 2 FINALStessy LokoPas encore d'évaluation
- Chapitre 03 Description Des API Et Les Logiciels STEP7 Et WINCCDocument22 pagesChapitre 03 Description Des API Et Les Logiciels STEP7 Et WINCCMohammed Amdjed DjebliPas encore d'évaluation
- APIDocument9 pagesAPIHish'am OscarPas encore d'évaluation
- Chapitre I. Automates Programmables IndustrielsDocument7 pagesChapitre I. Automates Programmables IndustrielsNori AzzaouiPas encore d'évaluation
- Du Microprocesseur À La Carte de Prototypage Partie 1: Microprocesseur Et MicrocontrôleurDocument4 pagesDu Microprocesseur À La Carte de Prototypage Partie 1: Microprocesseur Et MicrocontrôleurBsusnksPas encore d'évaluation
- Les Automates Programmables Industriels: I-IntroductionDocument18 pagesLes Automates Programmables Industriels: I-IntroductionAlibi helaPas encore d'évaluation
- Cours API-AEG020-2016 2 FiniDocument16 pagesCours API-AEG020-2016 2 Finibasma100% (2)
- Chap2 ArchitectureAPIDocument6 pagesChap2 ArchitectureAPISalim BouaziziPas encore d'évaluation
- Modbus Plus FipioDocument3 pagesModbus Plus Fipioاشر اقPas encore d'évaluation
- Chapitre IIIDocument18 pagesChapitre IIISalhi BahaPas encore d'évaluation
- Les macros avec OpenOffice CALC: La programmation BASIC pour tousD'EverandLes macros avec OpenOffice CALC: La programmation BASIC pour tousPas encore d'évaluation
- Les TI Au Service de La PME en Croissance: Le Cas de SemafoDocument20 pagesLes TI Au Service de La PME en Croissance: Le Cas de SemafoBOUDOUNIT YounesPas encore d'évaluation
- Chapitre 1Document35 pagesChapitre 1BOUDOUNIT YounesPas encore d'évaluation
- ETUDE DE CAS CORRIGEE (Pyramide Des Âges)Document4 pagesETUDE DE CAS CORRIGEE (Pyramide Des Âges)BOUDOUNIT YounesPas encore d'évaluation
- Complément de Cours: Diagramme de Fiabilité Ou Reliability Block Diagram (RBD)Document4 pagesComplément de Cours: Diagramme de Fiabilité Ou Reliability Block Diagram (RBD)BOUDOUNIT YounesPas encore d'évaluation
- Memento SDFDocument5 pagesMemento SDFBOUDOUNIT YounesPas encore d'évaluation
- Méthodes D'analyse de La SDFDocument32 pagesMéthodes D'analyse de La SDFBOUDOUNIT YounesPas encore d'évaluation
- TD1 CorrigéDocument5 pagesTD1 CorrigéBOUDOUNIT Younes100% (1)
- Chap3 - Composants Et Indicateurs de La SDF (Partie2 - Maintenabilité-Disponibilité)Document22 pagesChap3 - Composants Et Indicateurs de La SDF (Partie2 - Maintenabilité-Disponibilité)BOUDOUNIT YounesPas encore d'évaluation
- Acfrogcfftugwuxbfajzlge Rjjz2namxiqm0blbu1gpnktpwbgf C533tjzibplwletri9rnquqfbm6fyx1h07nenqg6twjdj1 Flcruh-Fsjnwesis Jwcum0 Vkzzlmad4s6cttnft5-BydzrDocument7 pagesAcfrogcfftugwuxbfajzlge Rjjz2namxiqm0blbu1gpnktpwbgf C533tjzibplwletri9rnquqfbm6fyx1h07nenqg6twjdj1 Flcruh-Fsjnwesis Jwcum0 Vkzzlmad4s6cttnft5-BydzrBOUDOUNIT YounesPas encore d'évaluation
- Arbre de Défaillance (ADD) : 2.2 Méthodes DéductivesDocument8 pagesArbre de Défaillance (ADD) : 2.2 Méthodes DéductivesBOUDOUNIT YounesPas encore d'évaluation
- Méthodologie À SuivreDocument2 pagesMéthodologie À SuivreMainsa WadidiéPas encore d'évaluation
- Fiabilitex - PDF FiabilitéDocument10 pagesFiabilitex - PDF FiabilitéLarbi Elbakkali100% (1)
- Totale Productive Maintenance TPMDocument11 pagesTotale Productive Maintenance TPMBOUDOUNIT YounesPas encore d'évaluation
- Composants Et Indicateurs de La SDFDocument45 pagesComposants Et Indicateurs de La SDFBOUDOUNIT YounesPas encore d'évaluation
- Chap3 - Composants Et Indicateurs de La SDF (Partie2 - Maintenabilité-Disponibilité)Document22 pagesChap3 - Composants Et Indicateurs de La SDF (Partie2 - Maintenabilité-Disponibilité)BOUDOUNIT YounesPas encore d'évaluation
- Acfrogcfftugwuxbfajzlge Rjjz2namxiqm0blbu1gpnktpwbgf C533tjzibplwletri9rnquqfbm6fyx1h07nenqg6twjdj1 Flcruh-Fsjnwesis Jwcum0 Vkzzlmad4s6cttnft5-BydzrDocument7 pagesAcfrogcfftugwuxbfajzlge Rjjz2namxiqm0blbu1gpnktpwbgf C533tjzibplwletri9rnquqfbm6fyx1h07nenqg6twjdj1 Flcruh-Fsjnwesis Jwcum0 Vkzzlmad4s6cttnft5-BydzrBOUDOUNIT YounesPas encore d'évaluation
- Annexe 1 APIDocument9 pagesAnnexe 1 APIImèn JndoubiPas encore d'évaluation
- Chapitre3 SGF PDFDocument12 pagesChapitre3 SGF PDFHaitam ElaidoudiPas encore d'évaluation
- Bus - Maintenance Informatique-6 Sur30Document23 pagesBus - Maintenance Informatique-6 Sur30FOUAD EL BRAHMIPas encore d'évaluation
- 6 Séance 3Document5 pages6 Séance 3Gregory CollinPas encore d'évaluation
- My DittoDocument48 pagesMy DittoLaëtitia da GuiaPas encore d'évaluation
- Cours 6 - Mémoire VirtuelleDocument35 pagesCours 6 - Mémoire VirtuelleNabil ManaaPas encore d'évaluation
- Installation Serveur W2KDocument9 pagesInstallation Serveur W2Kstrideworld100% (1)
- Question Pour ChampionDocument3 pagesQuestion Pour ChampionHamzaLakrounePas encore d'évaluation
- Rattrapage 2018-2019 + SolutionDocument4 pagesRattrapage 2018-2019 + SolutionHettal AdelPas encore d'évaluation
- Prise en Main de Windows 10Document84 pagesPrise en Main de Windows 10Frédéric MARQUERPas encore d'évaluation
- Gamme Modulaire - Apercu Du SystemeDocument10 pagesGamme Modulaire - Apercu Du SystemeAngy RPas encore d'évaluation
- AOA Chap1 P1Document61 pagesAOA Chap1 P1ekram ekramPas encore d'évaluation
- TD1 - Principe Manupulation Des BitsDocument2 pagesTD1 - Principe Manupulation Des BitsLarabassePas encore d'évaluation
- Idrac 7Document211 pagesIdrac 7solikan45Pas encore d'évaluation
- PM552 00001Document4 pagesPM552 00001Julien BouchezPas encore d'évaluation
- Tdm57 2Document428 pagesTdm57 2akremibechirPas encore d'évaluation
- Chap2 3 Pla Pal GalDocument17 pagesChap2 3 Pla Pal GalMENANI ZineddinePas encore d'évaluation
- Comment Télécharger EtDocument16 pagesComment Télécharger EtPiloupilouPas encore d'évaluation
- Les Automates Programmables IndustriellesDocument13 pagesLes Automates Programmables Industriellessaad ratbiPas encore d'évaluation
- Jabra Evolve 65 Manual - FR - French - RevFDocument23 pagesJabra Evolve 65 Manual - FR - French - RevFLouis PeyralbesPas encore d'évaluation
- MbedDocument25 pagesMbedMohamed AmirPas encore d'évaluation
- 35020312-12 FR PDFDocument136 pages35020312-12 FR PDFCHEIKH AbdarahmanPas encore d'évaluation
- SKL Datasheet Vol 1 - Rev009Document172 pagesSKL Datasheet Vol 1 - Rev009Alessandro BocchinoPas encore d'évaluation
- Utiliser Des Machines Virtuelles 64 Bits Avec VirtualBoxDocument4 pagesUtiliser Des Machines Virtuelles 64 Bits Avec VirtualBoxcherifh1968Pas encore d'évaluation
- Exercice Sur Linux2Document17 pagesExercice Sur Linux2Francis RUKANPas encore d'évaluation
- FR200001 PDFDocument56 pagesFR200001 PDFarachidPas encore d'évaluation
- CalmDocument8 pagesCalmFlavien Raymond AndriatsihoaranaPas encore d'évaluation
- DxO PhotoLab 4.0.0 Version EliteDocument2 pagesDxO PhotoLab 4.0.0 Version Elitezevotco jemmyPas encore d'évaluation
- Chapitre LCS 3Document14 pagesChapitre LCS 3Amina ChelloumPas encore d'évaluation
- Electricien - Automaticien Siic 1: Tableau Des Competences Terminales ExercéesDocument10 pagesElectricien - Automaticien Siic 1: Tableau Des Competences Terminales ExercéespopaminoPas encore d'évaluation