Vous aimerez peut-être aussi
- 2_Cours_systèmes_échantillonnésDocument81 pages2_Cours_systèmes_échantillonnéshoussamann73Pas encore d'évaluation
- Ch1 - Instrum - Chaine de Mesure - Master - MQ2017Document10 pagesCh1 - Instrum - Chaine de Mesure - Master - MQ2017nabil echerrarPas encore d'évaluation
- CapteursDocument12 pagesCapteursMôhãmêd BèñPas encore d'évaluation
- Systèmes Asservis EchantillonnésDocument26 pagesSystèmes Asservis EchantillonnésbikePas encore d'évaluation
- Cours_Introduction capteurDocument61 pagesCours_Introduction capteurimanear20Pas encore d'évaluation
- Cours 1 Généralités Détecteurs de Position PDFDocument37 pagesCours 1 Généralités Détecteurs de Position PDFGuenoukpatiAgbassou100% (1)
- Traitement Du Signal (Chapitre 1)Document13 pagesTraitement Du Signal (Chapitre 1)lordabdias9Pas encore d'évaluation
- TdsDocument68 pagesTdsElmehdi LemoudaPas encore d'évaluation
- Chapitre I Commande Des ProcedesDocument19 pagesChapitre I Commande Des ProcedesrezakPas encore d'évaluation
- CAPTEUR1 TSE Version FINAAAL 1Document22 pagesCAPTEUR1 TSE Version FINAAAL 1dev6logPas encore d'évaluation
- Chapitre 1 Notions Base Signaux SystemesDocument7 pagesChapitre 1 Notions Base Signaux SystemesismaouiPas encore d'évaluation
- Les CapteursDocument14 pagesLes CapteursSab RinaPas encore d'évaluation
- CH I - Caractéristiques D'un Système de MesureDocument25 pagesCH I - Caractéristiques D'un Système de MesureAMIRAFORTASPas encore d'évaluation
- SIGNAUX ET SYSTEMESDocument58 pagesSIGNAUX ET SYSTEMESsarrfallou267Pas encore d'évaluation
- Capteurs Actifs PassifsDocument5 pagesCapteurs Actifs PassifssyoudijlPas encore d'évaluation
- Cours CapteursDocument120 pagesCours CapteursMohamed Moudine100% (1)
- Questionaire PSFinalDocument17 pagesQuestionaire PSFinalAnastasiaPas encore d'évaluation
- Diap 1 Notions de Base Sur Les Signaux EtDocument20 pagesDiap 1 Notions de Base Sur Les Signaux EtYounouss KEITAPas encore d'évaluation
- Cours - Regulation Industrielle - p1Document46 pagesCours - Regulation Industrielle - p1nouhanPas encore d'évaluation
- Chapitre 12Document44 pagesChapitre 12Oussama EljaafariPas encore d'évaluation
- Module 3 STM Chaine D'informationDocument26 pagesModule 3 STM Chaine D'informationmarouanereali01Pas encore d'évaluation
- AUTOMATIC2Document33 pagesAUTOMATIC2Moad MerzoukPas encore d'évaluation
- Leçon 1 - Representation Des SignauxDocument11 pagesLeçon 1 - Representation Des SignauxMBIEDA NGOMEGNI FRANK GAETANPas encore d'évaluation
- Chap1 Sign Syst 3IAIIDocument53 pagesChap1 Sign Syst 3IAIIOthman MoubarikPas encore d'évaluation
- CapteursDocument12 pagesCapteursLynda MOKRANIPas encore d'évaluation
- Capter Grandeur - LC - v2015 10 08Document4 pagesCapter Grandeur - LC - v2015 10 08ahmed lpPas encore d'évaluation
- Capteurs Cours 02Document12 pagesCapteurs Cours 02KingSqueed 888Pas encore d'évaluation
- Cours CapteurDocument10 pagesCours CapteureliemutambaeliePas encore d'évaluation
- Automatique 1 20172018 ZLI 1Document22 pagesAutomatique 1 20172018 ZLI 1Houssine LimounyPas encore d'évaluation
- Introduction: Les Capteurs - CoursDocument2 pagesIntroduction: Les Capteurs - CoursMenasria MissivaPas encore d'évaluation
- Chap-1 Automatique 2021-2022 TEER Edited-1Document20 pagesChap-1 Automatique 2021-2022 TEER Edited-1abdessadik ohamouPas encore d'évaluation
- Traitement Du Signal v1.1Document33 pagesTraitement Du Signal v1.1bananaadams7Pas encore d'évaluation
- CH.I: Principes Généraux Des CapteursDocument17 pagesCH.I: Principes Généraux Des CapteursLok LokPas encore d'évaluation
- Contrôle Des Processus (Tome Tome 1) (0000000012997)Document103 pagesContrôle Des Processus (Tome Tome 1) (0000000012997)Putin PutoutPas encore d'évaluation
- Les CapteursDocument6 pagesLes Capteursclair ricePas encore d'évaluation
- C281 Noura Chapitre1Document20 pagesC281 Noura Chapitre1Ladhari HamzaPas encore d'évaluation
- Numérique Partie1 CombiDocument176 pagesNumérique Partie1 Combimcraam1985100% (1)
- Les CapteursDocument6 pagesLes Capteursclair ricePas encore d'évaluation
- Cours Systémes Echantillonnés 1Document13 pagesCours Systémes Echantillonnés 1Shompinho Matloaa100% (1)
- Chapitre 2 Capteurs Types Et CaracteristiquesDocument15 pagesChapitre 2 Capteurs Types Et CaracteristiquesManar BaraãPas encore d'évaluation
- Cours Instrumentation - Chap-1 - 2015.Pptx Version 1Document66 pagesCours Instrumentation - Chap-1 - 2015.Pptx Version 1Oudjoud Keddour100% (1)
- Chapitre 1Document6 pagesChapitre 1Christ MouityPas encore d'évaluation
- Chapitre N°1 CI Généralités Sur Les Capteurs 2022Document9 pagesChapitre N°1 CI Généralités Sur Les Capteurs 2022AHMED HANAFIPas encore d'évaluation
- UE GEP3041L Automatique 2: Madiha NADRIDocument95 pagesUE GEP3041L Automatique 2: Madiha NADRILyes SaidiPas encore d'évaluation
- Cours Regulation Industrielle Gm&Gi p1Document29 pagesCours Regulation Industrielle Gm&Gi p1Oualid OuaquadPas encore d'évaluation
- Partie2. AsservissementNumériqueDocument58 pagesPartie2. AsservissementNumériqueTHONYPas encore d'évaluation
- Chapitre 1Document14 pagesChapitre 1Sidali BmrPas encore d'évaluation
- Métrologie 2021Document17 pagesMétrologie 2021Christian Ismaël Tcheutchoua TakamPas encore d'évaluation
- TP 1 DoughDocument9 pagesTP 1 Doughleo slegPas encore d'évaluation
- Capture D'écran . 2024-02-02 À 09.04.02Document64 pagesCapture D'écran . 2024-02-02 À 09.04.02Boris GaetanPas encore d'évaluation
- TAS IntroductionDocument13 pagesTAS IntroductionAssia KourgliPas encore d'évaluation
- Cours Signaux Et SystèmesDocument20 pagesCours Signaux Et SystèmesFresnelPas encore d'évaluation
- Regulation Cours PDFDocument106 pagesRegulation Cours PDFOmar RajhiPas encore d'évaluation
- Representation Symbolique de La RegulationDocument9 pagesRepresentation Symbolique de La RegulationNejmeddine Bannour67% (3)
- Théorie de La ConvolutionDocument15 pagesThéorie de La ConvolutionRenaît Des cendresPas encore d'évaluation
- Chapitre IDocument4 pagesChapitre IPatrick MonkamPas encore d'évaluation
- CM8 CanDocument27 pagesCM8 Canfazfrito lacaviataPas encore d'évaluation
- Examen de Schémas Et Appareillage CorrigéDocument2 pagesExamen de Schémas Et Appareillage Corrigéfazfrito lacaviataPas encore d'évaluation
- Examen Signaux NumériqueDocument5 pagesExamen Signaux Numériquefazfrito lacaviataPas encore d'évaluation
- CM4 - OperatArithmDocument26 pagesCM4 - OperatArithmfazfrito lacaviataPas encore d'évaluation
- CM5 - Rupture de SéquencesDocument37 pagesCM5 - Rupture de Séquencesfazfrito lacaviataPas encore d'évaluation
- SN 2017-10 Partiel CorrigéDocument4 pagesSN 2017-10 Partiel Corrigéfazfrito lacaviataPas encore d'évaluation
- TD 2-1Document1 pageTD 2-1Khaled BenyoucefPas encore d'évaluation
- AII - Chap 4 - Les Actionneurs Et Les PréactionneursDocument11 pagesAII - Chap 4 - Les Actionneurs Et Les Préactionneursfazfrito lacaviataPas encore d'évaluation
- Merged 20200625 151846.TextMarkDocument3 pagesMerged 20200625 151846.TextMarkfazfrito lacaviataPas encore d'évaluation
- AII - Chap 2 - Les APIDocument16 pagesAII - Chap 2 - Les APIfazfrito lacaviataPas encore d'évaluation
- Merged 20200625 152407.TextMarkDocument3 pagesMerged 20200625 152407.TextMarkfazfrito lacaviataPas encore d'évaluation
- Merged 20200625 153032.TextMarkDocument47 pagesMerged 20200625 153032.TextMarkfazfrito lacaviataPas encore d'évaluation
- Examen Signaux NumériqueDocument5 pagesExamen Signaux Numériquefazfrito lacaviataPas encore d'évaluation
- Corrigé TD Analyse2 MI Equat Diff 19 20Document15 pagesCorrigé TD Analyse2 MI Equat Diff 19 20Hind ChadliPas encore d'évaluation
- Ghamri KhaledDocument97 pagesGhamri Khaledfazfrito lacaviataPas encore d'évaluation
- M Ecanique Des FluidesDocument207 pagesM Ecanique Des Fluidesfazfrito lacaviataPas encore d'évaluation
- UntitledDocument33 pagesUntitledfazfrito lacaviataPas encore d'évaluation
- Modelisation Et Simulation D'une Mas A L'aide Du Simulink PDFDocument8 pagesModelisation Et Simulation D'une Mas A L'aide Du Simulink PDFhb1966100% (1)
- Travaux Dirigés N°3 Transfert Thermique Par Rayonnement Exercice 01Document2 pagesTravaux Dirigés N°3 Transfert Thermique Par Rayonnement Exercice 01fazfrito lacaviataPas encore d'évaluation
- Présentation 5Document43 pagesPrésentation 5fazfrito lacaviataPas encore d'évaluation
- 5ESPE Théorie Champs Tournants 2018 2019 2 en 1Document13 pages5ESPE Théorie Champs Tournants 2018 2019 2 en 1fazfrito lacaviataPas encore d'évaluation
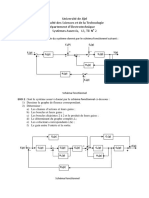
- Université de Jijel Faculté Des Sciences Et de La Technologie Département D'electrotechnique Systèmes Asservis, L3, TD N 2Document6 pagesUniversité de Jijel Faculté Des Sciences Et de La Technologie Département D'electrotechnique Systèmes Asservis, L3, TD N 2fazfrito lacaviataPas encore d'évaluation
- EMDAss 2022Document4 pagesEMDAss 2022fazfrito lacaviataPas encore d'évaluation
- Université de Jijel Faculté Des Sciences Et de La Technologie Département D'electrotechnique Systèmes Asservis, L3, TD N 1Document6 pagesUniversité de Jijel Faculté Des Sciences Et de La Technologie Département D'electrotechnique Systèmes Asservis, L3, TD N 1fazfrito lacaviataPas encore d'évaluation
- ELTF2TD2Document4 pagesELTF2TD2fazfrito lacaviataPas encore d'évaluation
- TD1 & SolutionDocument6 pagesTD1 & Solutionfazfrito lacaviata100% (1)
- Corrige TD3Document2 pagesCorrige TD3fazfrito lacaviataPas encore d'évaluation
- Exercice Chapitre3 15Document2 pagesExercice Chapitre3 15fazfrito lacaviataPas encore d'évaluation
- DW DW DW CC DWDocument3 pagesDW DW DW CC DWfazfrito lacaviataPas encore d'évaluation
- TD4 Eltf2Document6 pagesTD4 Eltf2fazfrito lacaviataPas encore d'évaluation
- Cahier Electronique S3 TDs 2019 2020Document29 pagesCahier Electronique S3 TDs 2019 2020Hiba LanayPas encore d'évaluation
- TP AnalogiqueDocument7 pagesTP AnalogiqueMariam SajidPas encore d'évaluation
- D226 Chapitre-5Document32 pagesD226 Chapitre-5Ibtissam ZaajPas encore d'évaluation
- TNS5 FiltNumDocument52 pagesTNS5 FiltNumChaima BelhediPas encore d'évaluation
- ds1 Elec CDocument7 pagesds1 Elec CMohamed HANINIPas encore d'évaluation
- Cours FFT!!!!!!!!Document9 pagesCours FFT!!!!!!!!tichatataPas encore d'évaluation
- Application Du Filtrage Adaptatif À L'annulation de L'écho AcoustiqueDocument60 pagesApplication Du Filtrage Adaptatif À L'annulation de L'écho AcoustiqueSamira ErramiPas encore d'évaluation
- TDMod AnalogDocument25 pagesTDMod AnalogZakariaa BardaiPas encore d'évaluation
- GradateurDocument13 pagesGradateurAhmed MaadiPas encore d'évaluation
- Architecture D'emetteur Pour Systèmes de RadiocommunicationDocument127 pagesArchitecture D'emetteur Pour Systèmes de RadiocommunicationandrytahiryPas encore d'évaluation
- ESE03 ProgrammeDocument1 pageESE03 ProgrammeAbdenourPas encore d'évaluation
- Chapitre 15 0Document35 pagesChapitre 15 0spyeaglePas encore d'évaluation
- Sommaire Du LivreDocument8 pagesSommaire Du LivreCharo CassPas encore d'évaluation
- TD Filres PassifsDocument1 pageTD Filres Passifselkhalil issartiPas encore d'évaluation
- La Technologie XDSLDocument30 pagesLa Technologie XDSLRonaldo AtindokpoPas encore d'évaluation
- C113 LamplificateuroperationnelDocument12 pagesC113 LamplificateuroperationnelKarima Ben salahPas encore d'évaluation
- Cours Filtres 1Document33 pagesCours Filtres 1medlkPas encore d'évaluation
- Masoneilan 4411 Transducer ATEX Manual (French)Document16 pagesMasoneilan 4411 Transducer ATEX Manual (French)zakariaPas encore d'évaluation
- TP FiltreOrdre1 0910Document3 pagesTP FiltreOrdre1 0910Abde DilamPas encore d'évaluation
- Debruitage Des Signaux Par EmdDocument4 pagesDebruitage Des Signaux Par EmdetheretherPas encore d'évaluation
- Didacticiel Quartus IIDocument59 pagesDidacticiel Quartus IIREDNANI100% (1)
- Filtrage Adaptatif Présentation v2Document159 pagesFiltrage Adaptatif Présentation v2Mohamed Sadek Kemmouche100% (1)
- Exercices Amplificateur de TransconductanceDocument8 pagesExercices Amplificateur de TransconductanceBouchra BourassPas encore d'évaluation
- Rehaussement PDFDocument11 pagesRehaussement PDFSami FarsiPas encore d'évaluation
- Memoire de Master: Ministere de L'Enseignement Superieur Et de La Recherche ScientifiqueDocument103 pagesMemoire de Master: Ministere de L'Enseignement Superieur Et de La Recherche ScientifiqueDiana AugustinaePas encore d'évaluation
- Me RPRV9C PDFDocument106 pagesMe RPRV9C PDFJawadPas encore d'évaluation
- Fiche Sur Généralités Sur Les FiltresDocument8 pagesFiche Sur Généralités Sur Les FiltresYoussef RiahiPas encore d'évaluation
- Chapitre 1 :introduction Aux Systemes de TélécommunicationsDocument10 pagesChapitre 1 :introduction Aux Systemes de TélécommunicationsFth WalterPas encore d'évaluation
- TD N°1 Systèmes de Télécommunications PDFDocument3 pagesTD N°1 Systèmes de Télécommunications PDFMohamed BenrahalPas encore d'évaluation
- TD-A14 Filtres ActiDocument17 pagesTD-A14 Filtres ActighkkbPas encore d'évaluation