Vous aimerez peut-être aussi
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- Les 72 Génies de KabbaleDocument133 pagesLes 72 Génies de KabbaleFernando Rodrigues Lopes100% (3)
- Photovoltaïque | pas à pas: Le guide pratique pour débutants pour la conception d'une installation PVD'EverandPhotovoltaïque | pas à pas: Le guide pratique pour débutants pour la conception d'une installation PVPas encore d'évaluation
- Variateur de Vitesse D - Un Moteur À Courant ContinuDocument5 pagesVariateur de Vitesse D - Un Moteur À Courant Continuerno785100% (1)
- Boite de Vitesses AutomatiqueDocument38 pagesBoite de Vitesses Automatiqueberwolf100% (1)
- Pestel ReferencesDocument108 pagesPestel ReferencesMed MomoPas encore d'évaluation
- Comment construire son drone de zéro: Comment construire son drone et dimensionner les différentes partiesD'EverandComment construire son drone de zéro: Comment construire son drone et dimensionner les différentes partiesÉvaluation : 2 sur 5 étoiles2/5 (1)
- Cours Controle ProcessusDocument339 pagesCours Controle ProcessusDayan Van RillaertPas encore d'évaluation
- Gazoline Juin 2017Document148 pagesGazoline Juin 2017Mou Mou100% (2)
- RapportDocument8 pagesRapportFerdinand GangdebePas encore d'évaluation
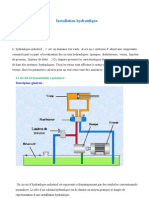
- Installation HydrauliqueDocument11 pagesInstallation HydrauliqueAyoub Fajraoui100% (2)
- Turbines À GazDocument8 pagesTurbines À GazAladin ZeribiPas encore d'évaluation
- Moteurs HydrauliquesDocument38 pagesMoteurs HydrauliquesMoad KhiderPas encore d'évaluation
- Les Machines AsynchronesDocument20 pagesLes Machines Asynchronesbedoui marwenPas encore d'évaluation
- Reducteur de VitesseDocument26 pagesReducteur de Vitesseamjed_de_enim67% (3)
- FFB - Guide Des Déchets DangereuxDocument16 pagesFFB - Guide Des Déchets DangereuxProutPas encore d'évaluation
- Comment Un Accident Peut ArriverDocument14 pagesComment Un Accident Peut Arriverمحمد الأمين سنوساوي100% (1)
- Les Moteurs À Courant Continu, Synchrone Et AsynchroneDocument11 pagesLes Moteurs À Courant Continu, Synchrone Et AsynchroneHamza NabilPas encore d'évaluation
- DE - Les Moteurs Asynchrones TriphasesDocument8 pagesDE - Les Moteurs Asynchrones TriphasesdimachampionPas encore d'évaluation
- Variateurs de VitesseDocument17 pagesVariateurs de VitesseYanis Kemoun0% (1)
- La Variation de Vitesse - TechnologieDocument6 pagesLa Variation de Vitesse - TechnologiehichamPas encore d'évaluation
- H50D H60D H70D H80D de 01.2004 LINDEDocument104 pagesH50D H60D H70D H80D de 01.2004 LINDEAmmar ZouhairPas encore d'évaluation
- Chapitre 1 (Introduction Générales) AthmaniDocument18 pagesChapitre 1 (Introduction Générales) AthmaniSamroura YessadPas encore d'évaluation
- Partie ThéoriqueDocument8 pagesPartie ThéoriquewissemPas encore d'évaluation
- Variation de Vitesse Des MCCDocument8 pagesVariation de Vitesse Des MCCSmirnov Artaéév100% (1)
- Audit Des Moteurs ElectriquesDocument19 pagesAudit Des Moteurs ElectriquesBeaunel Si-preuvePas encore d'évaluation
- Les Moteurs ElectriquesDocument18 pagesLes Moteurs ElectriquesBeaunel Si-preuvePas encore d'évaluation
- Compte Rendu Mas MCC MsDocument24 pagesCompte Rendu Mas MCC MsAbderrazzak TaPas encore d'évaluation
- La Variation de VitesseDocument6 pagesLa Variation de Vitessenajim68Pas encore d'évaluation
- Aubes TurboMDocument18 pagesAubes TurboMM DouniaPas encore d'évaluation
- Les Moteurs À Courant Continu, Synchrone Et AsynchroneDocument11 pagesLes Moteurs À Courant Continu, Synchrone Et AsynchroneHamza Nabil100% (1)
- Moteur A Courant ContinueDocument3 pagesMoteur A Courant Continuedj.amin07100% (1)
- CHERGUIII3Document12 pagesCHERGUIII3Masouda NaboulaPas encore d'évaluation
- MOCN ProjetDocument10 pagesMOCN Projetboubeghla nadirPas encore d'évaluation
- MemoireDocument12 pagesMemoirewassimbabouche46Pas encore d'évaluation
- Choix Du Moteur Et ModulateurDocument9 pagesChoix Du Moteur Et ModulateurSaber HamdiPas encore d'évaluation
- Commande Électrique Des Mécanismes IndustrielsDocument34 pagesCommande Électrique Des Mécanismes Industrielsyacine dehmechePas encore d'évaluation
- Chap1la Variation de Vitesse-2Document6 pagesChap1la Variation de Vitesse-2مفتاح الدينPas encore d'évaluation
- Pid Vs RLFDocument48 pagesPid Vs RLFAdel ANPas encore d'évaluation
- TD Essuie-Glace EDocument2 pagesTD Essuie-Glace Elalique8022Pas encore d'évaluation
- 16 Variation VitesseDocument40 pages16 Variation VitessebenjarrayPas encore d'évaluation
- Dimensionnement D Un Systeme D EntrainementDocument11 pagesDimensionnement D Un Systeme D EntrainementbacimovitchPas encore d'évaluation
- Ethan Et Nohlan Moteur de de TondeuseDocument4 pagesEthan Et Nohlan Moteur de de Tondeusegustentur.momentosaPas encore d'évaluation
- chapitre 1 (rapport PFE)Document19 pageschapitre 1 (rapport PFE)Zakaria MardiPas encore d'évaluation
- Dimensionnement Sys D'entrainement PDFDocument40 pagesDimensionnement Sys D'entrainement PDFichrakPas encore d'évaluation
- Commande Foc MsapDocument22 pagesCommande Foc MsapKais AyadiPas encore d'évaluation
- Actionneur MécaniqueDocument4 pagesActionneur MécaniqueHB RIMPas encore d'évaluation
- Machines Tournantes Et Statiques IDocument38 pagesMachines Tournantes Et Statiques IGottlieb Roye100% (1)
- Mini ProjetDocument12 pagesMini ProjetWail Nou00Pas encore d'évaluation
- McccorDocument6 pagesMcccorcavasquePas encore d'évaluation
- Variateur de VitesseDocument10 pagesVariateur de VitesseKossayEssidPas encore d'évaluation
- Moteurs HydrauliquesDocument6 pagesMoteurs HydrauliquesKarem JebrilPas encore d'évaluation
- TP MachineDocument13 pagesTP Machinefadig4mez96Pas encore d'évaluation
- Les Machines A Courant ContinuDocument10 pagesLes Machines A Courant ContinuEpsp MedPas encore d'évaluation
- Cours TransmissionDocument8 pagesCours TransmissionNeoXana01100% (1)
- IntroductionDocument8 pagesIntroductionMezine SohaibPas encore d'évaluation
- Merged 20200624 232813Document118 pagesMerged 20200624 232813Anas LghaziPas encore d'évaluation
- Nouveau Document Microsoft WordDocument22 pagesNouveau Document Microsoft WordHamza HamzaPas encore d'évaluation
- Variation de Vitesse Moteurs CCDocument4 pagesVariation de Vitesse Moteurs CCkrhym11Pas encore d'évaluation
- Les Moteurs ÉlectriquesDocument14 pagesLes Moteurs Électriquesisaac yamien ebiniPas encore d'évaluation
- Chapitre1Document18 pagesChapitre1Oumaima JORAICHEPas encore d'évaluation
- Chapitre 1 Generalite Sur Les Machines AsynchronesDocument20 pagesChapitre 1 Generalite Sur Les Machines AsynchronesBilal HBPas encore d'évaluation
- Commande MCCDocument20 pagesCommande MCCAmIne Omda100% (1)
- AC042Qui Êtes-Vous ..Document266 pagesAC042Qui Êtes-Vous ..Attar NoureddinePas encore d'évaluation
- TopoDocument3 pagesTopoSta ToxPas encore d'évaluation
- Francais Fin Ce2 Marseille 2014 EleveDocument9 pagesFrancais Fin Ce2 Marseille 2014 Eleveajy montessouriPas encore d'évaluation
- Seance Du 05-06-2020Document2 pagesSeance Du 05-06-2020Chimie PhysiquePas encore d'évaluation
- La Santé Mentale PrésentationDocument12 pagesLa Santé Mentale PrésentationFerdaous MalamanePas encore d'évaluation
- ForaDocument9 pagesForaanthonybrandon1302Pas encore d'évaluation
- Cours Système NerveuxDocument9 pagesCours Système NerveuxMohammed errifaiyPas encore d'évaluation
- LéonDocument16 pagesLéonSarah Bourletias100% (1)
- Item 242 - Adenome HypophysaireDocument4 pagesItem 242 - Adenome HypophysaireTekwa MelsPas encore d'évaluation
- Roxtec Ex Product Catalogue en FR de Es ItDocument88 pagesRoxtec Ex Product Catalogue en FR de Es Itmonik_atabaresPas encore d'évaluation
- La Ministre de La Justice Est Responsable de L'application de La Présente Loi. Décret 919-2019 Du 4 Septembre 2019, (2019) 151 G.O. 2, 3975Document10 pagesLa Ministre de La Justice Est Responsable de L'application de La Présente Loi. Décret 919-2019 Du 4 Septembre 2019, (2019) 151 G.O. 2, 3975David MessierPas encore d'évaluation
- CNTRL 2 Bac SC X S 1 - 22-23Document2 pagesCNTRL 2 Bac SC X S 1 - 22-23Outouli MohamedPas encore d'évaluation
- Fisca 4 CorrectionDocument21 pagesFisca 4 CorrectionHermann CHEMEUHIPas encore d'évaluation
- Chapitre 1-Domaine D'étude de La MicrobiologieDocument100 pagesChapitre 1-Domaine D'étude de La MicrobiologieBernard SoumaPas encore d'évaluation
- Cours Complet de TopologieDocument60 pagesCours Complet de TopologieKygoPas encore d'évaluation
- SOLS - Microbiologie, Interactions Entre Micro-Organismes Non Symbiotiques Et Plantes - Encyclopædia UniversalisDocument9 pagesSOLS - Microbiologie, Interactions Entre Micro-Organismes Non Symbiotiques Et Plantes - Encyclopædia UniversalisJoël FafaPas encore d'évaluation
- ISO 11133 (1) (Mode de Compatibilité)Document9 pagesISO 11133 (1) (Mode de Compatibilité)agrojus778790Pas encore d'évaluation
- PR ésentation 2Document17 pagesPR ésentation 2oumqsdfPas encore d'évaluation
- SLUMP TEST+ COMPRESSION - NidhiDocument6 pagesSLUMP TEST+ COMPRESSION - NidhiHrithik IGPas encore d'évaluation
- P3270analyse Organique Technique de L IngenieurDocument12 pagesP3270analyse Organique Technique de L IngenieursalimPas encore d'évaluation
- Caddy Dec2022 PDFDocument12 pagesCaddy Dec2022 PDFHabanos CubanoPas encore d'évaluation
- Efm Stat 16 17 PDFDocument3 pagesEfm Stat 16 17 PDFSoufiane TouilPas encore d'évaluation
- Mecanique Tp3usmba09Document8 pagesMecanique Tp3usmba09AymanPas encore d'évaluation
- 0130 BONUS Cours+PDF Switch+et+IOSDocument62 pages0130 BONUS Cours+PDF Switch+et+IOSJulienne FatumaPas encore d'évaluation