Vous aimerez peut-être aussi
- Correction Dexamen Danalyse 2 PDFDocument4 pagesCorrection Dexamen Danalyse 2 PDFAyoub Laanait NVPas encore d'évaluation
- Annales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésD'EverandAnnales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- TP Chimie 04.10.23Document6 pagesTP Chimie 04.10.23maximedijoux6Pas encore d'évaluation
- Moteur À Courant Continu JJDDocument6 pagesMoteur À Courant Continu JJDYassine HasnaouiPas encore d'évaluation
- tp2 SimuDocument8 pagestp2 SimuHamza Ait BoulhcenPas encore d'évaluation
- Corriger Du TD Asservissement n10Document2 pagesCorriger Du TD Asservissement n10Ikram Ikram100% (2)
- Corrigé Série TD N°2Document5 pagesCorrigé Série TD N°2Nadir SaoudiPas encore d'évaluation
- Correction Probleme2Document5 pagesCorrection Probleme2hanane AmzilPas encore d'évaluation
- Modelisation3 AcmDocument3 pagesModelisation3 AcmimenenouvellePas encore d'évaluation
- ArmaDocument60 pagesArmaOtmane HamdaniPas encore d'évaluation
- Devoir 2 - FRDocument2 pagesDevoir 2 - FRhassan bbPas encore d'évaluation
- Devoir À RendreDocument6 pagesDevoir À RendreCHAIMAE KACEMIPas encore d'évaluation
- KJDJSDJJHJHDFDocument1 pageKJDJSDJJHJHDFEl MehdiPas encore d'évaluation
- 16 EuclidexoDocument5 pages16 EuclidexohmzbhiproPas encore d'évaluation
- TP #2: Etude de Systèmes Linéaires Du 1 Et2 Ordre Avec SIMULINKDocument8 pagesTP #2: Etude de Systèmes Linéaires Du 1 Et2 Ordre Avec SIMULINKsouaf.hedilPas encore d'évaluation
- Concours Centrale-Supélec 2021: Mathématiques 2 MPDocument4 pagesConcours Centrale-Supélec 2021: Mathématiques 2 MPabdel dalilPas encore d'évaluation
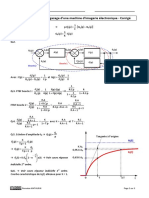
- Correction Interrogation Regulationoption Forage 2014Document1 pageCorrection Interrogation Regulationoption Forage 2014abdouPas encore d'évaluation
- Correction TD1 AutomatiqueDocument4 pagesCorrection TD1 AutomatiqueredPas encore d'évaluation
- Analyse 5Document21 pagesAnalyse 5susu worldPas encore d'évaluation
- Examen Final SLC CorrigéDocument3 pagesExamen Final SLC CorrigéNadir SaoudiPas encore d'évaluation
- Relation MatlabDocument5 pagesRelation MatlabSalma KadimiPas encore d'évaluation
- CNC MP 2005 Physique 2 CorrigeDocument4 pagesCNC MP 2005 Physique 2 Corrigesaid ramziPas encore d'évaluation
- T.D. Automatique N 1 - Corrige PDFDocument7 pagesT.D. Automatique N 1 - Corrige PDFYassine BridiPas encore d'évaluation
- Correction TD4Document4 pagesCorrection TD4Samah Ali BenamaraPas encore d'évaluation
- Correction ds2021Document5 pagesCorrection ds2021mohameddhia ajmiPas encore d'évaluation
- TD16 CorrectionDocument3 pagesTD16 Correctionsoufiane8fka100% (1)
- Tous Les TDsDocument45 pagesTous Les TDsAnonymous OBqZaPGN5Pas encore d'évaluation
- Solution Du TD N 1Document7 pagesSolution Du TD N 1راشدي أسامةPas encore d'évaluation
- TD Integrales ENSAMDocument2 pagesTD Integrales ENSAMSoukaina KhamlichiPas encore d'évaluation
- Solution td1Document9 pagesSolution td1Khalil elkPas encore d'évaluation
- Corrige Tous lesTDs Mathsspe GMPDocument17 pagesCorrige Tous lesTDs Mathsspe GMPWadii SGPas encore d'évaluation
- Correction Exercice 4Document3 pagesCorrection Exercice 4Imad Aboudrar100% (1)
- Chap 5Document21 pagesChap 5Grira SaharPas encore d'évaluation
- Thermique Duy BatimentDocument16 pagesThermique Duy BatimentDaouda KaborePas encore d'évaluation
- TD Regul 2005Document21 pagesTD Regul 2005moipop100% (1)
- Annexe de ProbaDocument9 pagesAnnexe de Probahananaharchi19Pas encore d'évaluation
- Chapitre 2Document52 pagesChapitre 2ELmokhtar HamrouniPas encore d'évaluation
- Cours7 Series Fourier Cle4dd2d7Document2 pagesCours7 Series Fourier Cle4dd2d7tarikjary1976Pas encore d'évaluation
- TD04 - Correction - CopieDocument7 pagesTD04 - Correction - CopieDOFONHAKOU LionelPas encore d'évaluation
- Corrigé DS 20-21Document4 pagesCorrigé DS 20-21Imen MassoudiPas encore d'évaluation
- Correction de La Série NDocument2 pagesCorrection de La Série NAymene TibaPas encore d'évaluation
- Gradateur 01Document16 pagesGradateur 01najim6850% (2)
- CHAPITRE II - COURS MOTEURS THERMIQUES 1 - de MR Adama - 2023-2024Document39 pagesCHAPITRE II - COURS MOTEURS THERMIQUES 1 - de MR Adama - 2023-2024assounaekrabenPas encore d'évaluation
- Complement Chapitre-2Document27 pagesComplement Chapitre-2DouaaPas encore d'évaluation
- TdmlapDocument4 pagesTdmlapAdam Ahmat AbakarPas encore d'évaluation
- Table Des Transformées de Fourier2 PDFDocument2 pagesTable Des Transformées de Fourier2 PDFYssoufFahSPas encore d'évaluation
- GrueDocument7 pagesGrueEs.sabery IsmailPas encore d'évaluation
- DS 1 20 21Document3 pagesDS 1 20 21MRayoub AbtPas encore d'évaluation
- F0176 Annexes Chapitre 09Document3 pagesF0176 Annexes Chapitre 09Abraham KonanPas encore d'évaluation
- Tableau de Formules ThermodynamiquesDocument2 pagesTableau de Formules Thermodynamiquesyoulmafia99100% (1)
- 1 Acc 35Document2 pages1 Acc 35bachir LPas encore d'évaluation
- DebbiDocument7 pagesDebbiInventorمخترع GamerSالالعابPas encore d'évaluation
- TD8 - Calcul Integral - Exercices Divers Sur Les IntegralesDocument3 pagesTD8 - Calcul Integral - Exercices Divers Sur Les IntegralesMaryam MaryamPas encore d'évaluation
- Correction TD3Document4 pagesCorrection TD3Amine AlaouiPas encore d'évaluation
- DSFDocument3 pagesDSFOmar KhayyamPas encore d'évaluation
- 02 - Démonstration Du Théorème de WeierstrassDocument2 pages02 - Démonstration Du Théorème de WeierstrassakramPas encore d'évaluation
- Analyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2D'EverandAnalyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2Pas encore d'évaluation
- Équations différentielles: Les Grands Articles d'UniversalisD'EverandÉquations différentielles: Les Grands Articles d'UniversalisPas encore d'évaluation
- Polycopie TD 1997 2008Document21 pagesPolycopie TD 1997 2008walid kahlounPas encore d'évaluation
- 20-DS - CO-Mastere 13 Juillet 2020Document4 pages20-DS - CO-Mastere 13 Juillet 2020walid kahlounPas encore d'évaluation
- Sol Exm Ratt Tai 1gi 2021Document2 pagesSol Exm Ratt Tai 1gi 2021walid kahlounPas encore d'évaluation
- Partie 1-1Document13 pagesPartie 1-1walid kahlounPas encore d'évaluation
- tp1 - Prise en Main de Lemulateur Emu8086 Et ArchitectureDocument2 pagestp1 - Prise en Main de Lemulateur Emu8086 Et Architecturewalid kahlounPas encore d'évaluation
- Instructions Assembleur - 8086Document15 pagesInstructions Assembleur - 8086walid kahloun100% (1)
- TdrobotiqueDocument10 pagesTdrobotiquewalid kahlounPas encore d'évaluation
- S24 P2 MourreDocument25 pagesS24 P2 MourreMohammed MATRIPas encore d'évaluation
- Cours Algèbre1 Et Exercices CorrigésDocument48 pagesCours Algèbre1 Et Exercices CorrigésYasser Zouheyr100% (1)
- Lingne Directe A2.1 - Guide Pédagogique PDFDocument192 pagesLingne Directe A2.1 - Guide Pédagogique PDFAvelar Centro de IdiomasPas encore d'évaluation
- Courte Introduction Plateforme Architecte IngenieurDocument19 pagesCourte Introduction Plateforme Architecte IngenieurpedromjmoreiraPas encore d'évaluation
- LeaBook Admin PDFDocument112 pagesLeaBook Admin PDFbnokazePas encore d'évaluation
- Éval 2 - Simulation - Chute Du E, SyllabationDocument2 pagesÉval 2 - Simulation - Chute Du E, SyllabationVictor Borjas BonillaPas encore d'évaluation
- Mat Sta 07-20Document78 pagesMat Sta 07-20Mohamed EL hadegPas encore d'évaluation
- Série d' Exercices de Révision - Addition Et Soustraction Des Nombres Relatifs - CinquièmeDocument2 pagesSérie d' Exercices de Révision - Addition Et Soustraction Des Nombres Relatifs - Cinquièmemoh1209Pas encore d'évaluation
- Présentation Sur La Motivation Du PesonnelDocument29 pagesPrésentation Sur La Motivation Du PesonnelFujada100% (5)
- Makefile Sur LinuxDocument12 pagesMakefile Sur LinuxboualamePas encore d'évaluation
- Le Présent Des Verbes Vouloir - PouvoirDocument1 pageLe Présent Des Verbes Vouloir - Pouvoirtheobessa9Pas encore d'évaluation
- Emploi Du Temps 4ème Année PrimaireDocument2 pagesEmploi Du Temps 4ème Année PrimaireMajdoulina Gafsaoui100% (2)
- Activités de Remédiations 2 AsDocument3 pagesActivités de Remédiations 2 AsKhaoula UsmistePas encore d'évaluation
- Faire Un Exposé Oral À Partir de Documents Écrits PDFDocument3 pagesFaire Un Exposé Oral À Partir de Documents Écrits PDFAnonymous 9XNBx3uziPas encore d'évaluation
- Bassim Ci2 Communication Professionnelle ExposeDocument48 pagesBassim Ci2 Communication Professionnelle ExposeRaghib Mohamed100% (1)
- Report DATA ADocument18 pagesReport DATA AGhada abbesPas encore d'évaluation
- Medias Et CommunicationDocument5 pagesMedias Et Communicationsimona stereaPas encore d'évaluation
- Comment Lire Un Thème AstralDocument16 pagesComment Lire Un Thème Astralmanon.dely45Pas encore d'évaluation
- Moussouteguy Nathalie 2002Document417 pagesMoussouteguy Nathalie 2002Abdelhak ChaquiPas encore d'évaluation
- Ed Dahby - Khadija-Cv - Hydraulique PDFDocument1 pageEd Dahby - Khadija-Cv - Hydraulique PDFkhadija eddahbyPas encore d'évaluation
- Sujet de Rattrapage Fondement de La Recherche Scientifique L2 2019-2020Document2 pagesSujet de Rattrapage Fondement de La Recherche Scientifique L2 2019-2020Osmän Abdøu IbrPas encore d'évaluation
- GuideUE 16 WebDocument228 pagesGuideUE 16 Webz0d14cPas encore d'évaluation
- AA-TC-Gestion Documentaire-PésentationDocument37 pagesAA-TC-Gestion Documentaire-PésentationHanane ZdoudiPas encore d'évaluation
- Projet de Construction D'Une Ecole Primaire Pour Enfant AutisteDocument13 pagesProjet de Construction D'Une Ecole Primaire Pour Enfant Autistedorgeles kouakouPas encore d'évaluation
- Dossier de Presse La Source Dorée 2019Document17 pagesDossier de Presse La Source Dorée 2019lasourcedoreePas encore d'évaluation
- Chapitre 1 Management Service MethodesDocument22 pagesChapitre 1 Management Service MethodesAbdou La0% (1)
- A Quoi Servent Les Mathematiques PDFDocument9 pagesA Quoi Servent Les Mathematiques PDFMarco RodriguezPas encore d'évaluation
- IFC Family Business Governance Handbook - FrenchDocument66 pagesIFC Family Business Governance Handbook - FrenchIFC SustainabilityPas encore d'évaluation
- S 1Document6 pagesS 1Hamzag GouidmiPas encore d'évaluation