Vous aimerez peut-être aussi
- Comment construire son drone de zéro: Comment construire son drone et dimensionner les différentes partiesD'EverandComment construire son drone de zéro: Comment construire son drone et dimensionner les différentes partiesÉvaluation : 2 sur 5 étoiles2/5 (1)
- Théorie et pratique du treuil: Treuils fixes et mobilesD'EverandThéorie et pratique du treuil: Treuils fixes et mobilesPas encore d'évaluation
- Hobbyking Kk2.0 Multi-Rotor Control Board: A - Présentation de La CarteDocument9 pagesHobbyking Kk2.0 Multi-Rotor Control Board: A - Présentation de La CarteBalaji AeroPas encore d'évaluation
- Notice Kkboard PDFDocument21 pagesNotice Kkboard PDFHichem HamdiPas encore d'évaluation
- Montage Et Réglage Du DJI F450Document25 pagesMontage Et Réglage Du DJI F450kankeuPas encore d'évaluation
- Notice 3 GXFR 2Document9 pagesNotice 3 GXFR 2bibs67Pas encore d'évaluation
- Manuel Pata Secmaire PlacideDocument26 pagesManuel Pata Secmaire Placidebenjamin richardPas encore d'évaluation
- 6117 Enonce DaeDocument5 pages6117 Enonce DaenajibPas encore d'évaluation
- RT c220 Cdi Part11Document21 pagesRT c220 Cdi Part11coyote41100% (1)
- TD 3 Automatismes IndustrielsDocument2 pagesTD 3 Automatismes IndustrielsBIJOUNA BILELPas encore d'évaluation
- R0035Document8 pagesR0035Daniel Peña VergaraPas encore d'évaluation
- Altivar 11: Guide D'exploitation User's Manual Bedienungsanleitung Guía de Explotación Guida All'impiegoDocument86 pagesAltivar 11: Guide D'exploitation User's Manual Bedienungsanleitung Guía de Explotación Guida All'impiegogustavo rosasPas encore d'évaluation
- Moteur de Vitesse / Capteur Timing - Calibrer: Arreter SIS Ecran PrécédentDocument8 pagesMoteur de Vitesse / Capteur Timing - Calibrer: Arreter SIS Ecran Précédenthamza MoussaidPas encore d'évaluation
- Notice de Montage Moteur HH PDFDocument16 pagesNotice de Montage Moteur HH PDFbekraPas encore d'évaluation
- Documentation RNR-USB2 Traduite FrançaisDocument27 pagesDocumentation RNR-USB2 Traduite FrançaisLionel SebertPas encore d'évaluation
- Manuel Casio FX 991 MSDocument40 pagesManuel Casio FX 991 MSPregoPas encore d'évaluation
- Manual Renaul 5 TurboDocument210 pagesManual Renaul 5 Turboalvirios100% (3)
- Commande Dun Moteur Pasapas PDFDocument16 pagesCommande Dun Moteur Pasapas PDFBentchikou MohPas encore d'évaluation
- Documentations SimplifieesDocument27 pagesDocumentations Simplifieescg97400Pas encore d'évaluation
- We ATB2Document16 pagesWe ATB2wifipoubellePas encore d'évaluation
- Procedure de CalibrageDocument3 pagesProcedure de CalibrageAndrea MartinPas encore d'évaluation
- Pi RapportDocument21 pagesPi RapportAmina AlalguiPas encore d'évaluation
- Notice F18E MDocument12 pagesNotice F18E MTristan DevantheryPas encore d'évaluation
- ATV11 User' S Manual IE21 1623802Document86 pagesATV11 User' S Manual IE21 1623802Juan Esteban Moreno VeraPas encore d'évaluation
- TS 700 - 920 - 1100 FR GBDocument30 pagesTS 700 - 920 - 1100 FR GBivan_poppezPas encore d'évaluation
- Catalogue 2016 v2Document14 pagesCatalogue 2016 v2autorreparaciones pinedoPas encore d'évaluation
- Manual Za Traktor Deutz 4006Document43 pagesManual Za Traktor Deutz 4006Danijel Danijela Begović100% (1)
- Capteur Angle Gîte: Référence Produit: 90-60-343Document13 pagesCapteur Angle Gîte: Référence Produit: 90-60-343cissePas encore d'évaluation
- Mme ImenDocument38 pagesMme ImenMejri AkremPas encore d'évaluation
- Manuel ModiflyDocument12 pagesManuel ModiflySlainshaPas encore d'évaluation
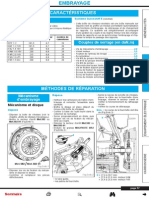
- Embrayage: Aide Au DiagnosticDocument32 pagesEmbrayage: Aide Au Diagnosticanis100% (1)
- Files PDFDocument289 pagesFiles PDFmchisPas encore d'évaluation
- Système TechDocument12 pagesSystème Techblaiso20200% (1)
- TP PneumatiqueDocument18 pagesTP Pneumatiquemoyabo0031Pas encore d'évaluation
- Manuel TouchMI PDFDocument23 pagesManuel TouchMI PDFEsteban De BlasisPas encore d'évaluation
- Manuel Lama v3 FR PDFDocument15 pagesManuel Lama v3 FR PDFscribbyscribPas encore d'évaluation
- 3TR006806BZB_WV-CW59x_CS58x_OI_F_1487055246.3255Document31 pages3TR006806BZB_WV-CW59x_CS58x_OI_F_1487055246.3255muhd ammar bin ramanPas encore d'évaluation
- Mise en Service Rapide D'un Variateur ATV312 v2Document7 pagesMise en Service Rapide D'un Variateur ATV312 v2redPas encore d'évaluation
- Revue Technique Renault AvantimeDocument1 096 pagesRevue Technique Renault Avantimeyayayal100% (1)
- Boîte Automatique Á 6 RapportsDocument72 pagesBoîte Automatique Á 6 RapportsKouni Ahmed83% (6)
- Balancing Robot PDFDocument42 pagesBalancing Robot PDFxxPas encore d'évaluation
- Docum Leroy Somer Unimotor CodeursDocument5 pagesDocum Leroy Somer Unimotor CodeursmauricetappaPas encore d'évaluation
- GV-1 Manuel en FrançaisDocument13 pagesGV-1 Manuel en FrançaisGilles MolesPas encore d'évaluation
- Manual Pedalera de La GuitarraDocument28 pagesManual Pedalera de La GuitarraDiego AlexanderPas encore d'évaluation
- TDC 3000Document76 pagesTDC 3000alain100% (1)
- INSTALLATION Homelink AUDIDocument12 pagesINSTALLATION Homelink AUDIJOHNNY5377Pas encore d'évaluation
- Conseils Pratiques: Carnet de BordDocument16 pagesConseils Pratiques: Carnet de BordNicolas DuboisPas encore d'évaluation
- Notice Gyroscope Futaba Gy401Document17 pagesNotice Gyroscope Futaba Gy401hal91Pas encore d'évaluation
- Ambreiaj ClioDocument10 pagesAmbreiaj ClioClaudiu Galatan100% (1)
- Cat 330d - Sisweb - Sisweb - Techdoc - Techdoc - Print - Page - JSP - PDFDocument11 pagesCat 330d - Sisweb - Sisweb - Techdoc - Techdoc - Print - Page - JSP - PDFMehdi ChakrounePas encore d'évaluation
- Pasquali 995 ManualDocument13 pagesPasquali 995 ManualTractorDiésel100% (1)
- Fusion 360 - Engrenage HélicoïdalDocument24 pagesFusion 360 - Engrenage Hélicoïdaljerome.luganPas encore d'évaluation
- Top Solid Quick ReferenceDocument12 pagesTop Solid Quick ReferenceAhmad CoulibalyPas encore d'évaluation
- Fiches PDFDocument6 pagesFiches PDFKeddrick ReynoldsPas encore d'évaluation
- SF RPG Free Day 2017 Premier Contact Web v1Document20 pagesSF RPG Free Day 2017 Premier Contact Web v1Olivier DubetPas encore d'évaluation
- ER9x Users Manual FrancaisDocument42 pagesER9x Users Manual Francaisjerome.luganPas encore d'évaluation
- ER9x Users Manual FrancaisDocument42 pagesER9x Users Manual Francaisjerome.luganPas encore d'évaluation
- 28 What Do You Meme RegleDocument3 pages28 What Do You Meme Reglejerome.luganPas encore d'évaluation
- DF Wurm Le Jeu de Role Dans Le Prehistoire PreviewDocument17 pagesDF Wurm Le Jeu de Role Dans Le Prehistoire Previewjerome.luganPas encore d'évaluation
- 08 Zooloretto Le Jeu de Des RegleDocument2 pages08 Zooloretto Le Jeu de Des Reglejerome.luganPas encore d'évaluation
- Ad Zoku RegleDocument8 pagesAd Zoku Reglejerome.luganPas encore d'évaluation
- 6d Zombies 5 Lecole Est Finie RegleDocument3 pages6d Zombies 5 Lecole Est Finie Reglejerome.luganPas encore d'évaluation
- 5f Worldwide Tennis RegleDocument32 pages5f Worldwide Tennis Reglejerome.luganPas encore d'évaluation
- Wildspace Regles FRDocument12 pagesWildspace Regles FRAlgan AlganPas encore d'évaluation
- Glossaire D&D 5 - GlossaireDocument22 pagesGlossaire D&D 5 - Glossairejerome.luganPas encore d'évaluation
- Imbroglio - Retour en EnferDocument12 pagesImbroglio - Retour en Enferjerome.luganPas encore d'évaluation
- Feuille PersoDocument2 pagesFeuille Persojerome.luganPas encore d'évaluation
- PJ, Parus de RochasDocument4 pagesPJ, Parus de Rochasjerome.luganPas encore d'évaluation
- Synopsis D'aventures D&D 5 - SynopsisDocument21 pagesSynopsis D'aventures D&D 5 - Synopsisjerome.luganPas encore d'évaluation
- Polaris - CorailDocument4 pagesPolaris - Corailjerome.luganPas encore d'évaluation
- ImbroglioDocument11 pagesImbrogliojerome.luganPas encore d'évaluation
- Eastenwest HS3 PolarisDocument18 pagesEastenwest HS3 PolarisMariettePas encore d'évaluation
- Animaux D&D 5 - AnimauxDocument32 pagesAnimaux D&D 5 - Animauxjerome.luganPas encore d'évaluation
- P3270analyse Organique Technique de L IngenieurDocument12 pagesP3270analyse Organique Technique de L IngenieursalimPas encore d'évaluation
- La Santé Mentale PrésentationDocument12 pagesLa Santé Mentale PrésentationFerdaous MalamanePas encore d'évaluation
- Pestel ReferencesDocument108 pagesPestel ReferencesMed MomoPas encore d'évaluation
- Supplement CarieDocument24 pagesSupplement Carielamia temmouchePas encore d'évaluation
- Chapitre 12 StatistiquesDocument25 pagesChapitre 12 StatistiquesLyse NdifoPas encore d'évaluation
- Nouvelles RecettesDocument27 pagesNouvelles RecettesSimon GrégoirePas encore d'évaluation
- Seance Du 05-06-2020Document2 pagesSeance Du 05-06-2020Chimie PhysiquePas encore d'évaluation
- 1741 DGD 4Document2 pages1741 DGD 4SerignePas encore d'évaluation
- TP Api IiDocument11 pagesTP Api IiAdem AounPas encore d'évaluation
- V2-3-12 Steering SystemDocument47 pagesV2-3-12 Steering Systemredwane ouberriPas encore d'évaluation
- Cours Complet de TopologieDocument60 pagesCours Complet de TopologieKygoPas encore d'évaluation
- SOLS - Microbiologie, Interactions Entre Micro-Organismes Non Symbiotiques Et Plantes - Encyclopædia UniversalisDocument9 pagesSOLS - Microbiologie, Interactions Entre Micro-Organismes Non Symbiotiques Et Plantes - Encyclopædia UniversalisJoël FafaPas encore d'évaluation
- PR ésentation 2Document17 pagesPR ésentation 2oumqsdfPas encore d'évaluation
- RehabiilitationDocument30 pagesRehabiilitationAHMEDOU LIMAMPas encore d'évaluation
- Mecanique Tp3usmba09Document8 pagesMecanique Tp3usmba09AymanPas encore d'évaluation
- 0130 BONUS Cours+PDF Switch+et+IOSDocument62 pages0130 BONUS Cours+PDF Switch+et+IOSJulienne FatumaPas encore d'évaluation
- ForaDocument9 pagesForaanthonybrandon1302Pas encore d'évaluation
- Cours Système NerveuxDocument9 pagesCours Système NerveuxMohammed errifaiyPas encore d'évaluation
- SLUMP TEST+ COMPRESSION - NidhiDocument6 pagesSLUMP TEST+ COMPRESSION - NidhiHrithik IGPas encore d'évaluation
- M Ethodes Num Eriques Pour Les Ecoulements IncompressiblesDocument80 pagesM Ethodes Num Eriques Pour Les Ecoulements IncompressiblesMohamed LatifiPas encore d'évaluation
- Comment Un Accident Peut ArriverDocument14 pagesComment Un Accident Peut Arriverمحمد الأمين سنوساوي100% (1)
- Fisca 4 CorrectionDocument21 pagesFisca 4 CorrectionHermann CHEMEUHIPas encore d'évaluation
- Efm Stat 16 17 PDFDocument3 pagesEfm Stat 16 17 PDFSoufiane TouilPas encore d'évaluation
- H50D H60D H70D H80D de 01.2004 LINDEDocument104 pagesH50D H60D H70D H80D de 01.2004 LINDEAmmar ZouhairPas encore d'évaluation
- Chapitre IDocument15 pagesChapitre Ihassane ayiPas encore d'évaluation
- AC042Qui Êtes-Vous ..Document266 pagesAC042Qui Êtes-Vous ..Attar NoureddinePas encore d'évaluation
- La Ministre de La Justice Est Responsable de L'application de La Présente Loi. Décret 919-2019 Du 4 Septembre 2019, (2019) 151 G.O. 2, 3975Document10 pagesLa Ministre de La Justice Est Responsable de L'application de La Présente Loi. Décret 919-2019 Du 4 Septembre 2019, (2019) 151 G.O. 2, 3975David MessierPas encore d'évaluation
- Rapport Mecanique Des Solides (Final)Document35 pagesRapport Mecanique Des Solides (Final)Elivs ECPas encore d'évaluation
- TopoDocument3 pagesTopoSta ToxPas encore d'évaluation
- Correction 1ere EauDocument10 pagesCorrection 1ere Eaupaulolalien02Pas encore d'évaluation