Vous aimerez peut-être aussi
- Physique - Chimie Tle S Enseignement Spécifique Livre Du ProfesseurDocument304 pagesPhysique - Chimie Tle S Enseignement Spécifique Livre Du ProfesseurRaphaël Lasry100% (7)
- Turbines HydrauliquesDocument34 pagesTurbines HydrauliquesAyoub Oukhalek100% (1)
- PC 09 Processus MaintenanceDocument5 pagesPC 09 Processus MaintenanceAbdelghafour Elhamadi100% (1)
- Cours6 Systeme de DistributionDocument7 pagesCours6 Systeme de DistributionReda kawakib100% (1)
- Reducteur de VitesseDocument26 pagesReducteur de Vitesseamjed_de_enim67% (3)
- Chapitre 4Document2 pagesChapitre 4mounaPas encore d'évaluation
- M28 - Installation, Réparation Commande Électronique de MoteurDocument154 pagesM28 - Installation, Réparation Commande Électronique de MoteurCoolmanPas encore d'évaluation
- Pompes Hydrauliques PDFDocument26 pagesPompes Hydrauliques PDFImene Radhouane71% (7)
- Séminaire Atelier Sur Le Renforcement Des Capacités CNJC2Document51 pagesSéminaire Atelier Sur Le Renforcement Des Capacités CNJC2CristelFigeraldFeuguemPas encore d'évaluation
- Hydraulique Des Pompes Centrefuges-M Sbai-04-01-2021Document80 pagesHydraulique Des Pompes Centrefuges-M Sbai-04-01-2021Rachid MOUJAHIDPas encore d'évaluation
- Reducteur A Vis Sans FinDocument18 pagesReducteur A Vis Sans FinImane ElkhoukhPas encore d'évaluation
- Moteurs HydrauliquesDocument38 pagesMoteurs HydrauliquesMoad KhiderPas encore d'évaluation
- Cicruit HydDocument22 pagesCicruit HydSITOU NATHANAELPas encore d'évaluation
- Technologie Des PompesDocument9 pagesTechnologie Des Pompessélem AzPas encore d'évaluation
- TD3 LLC CorrigeDocument3 pagesTD3 LLC CorrigeSabrine JhPas encore d'évaluation
- Pompes Hydrauliques PDFDocument26 pagesPompes Hydrauliques PDFSamirDerguinePas encore d'évaluation
- Chapitr 4 Verins HydrauliquesDocument26 pagesChapitr 4 Verins HydrauliquesFiras NjéhiPas encore d'évaluation
- Pompes PDFDocument39 pagesPompes PDFزكري اءPas encore d'évaluation
- 2011 HydrauliqueDocument32 pages2011 HydrauliqueMelek Frikha100% (1)
- Processus AchatDocument40 pagesProcessus AchathindPas encore d'évaluation
- Cours N 2 HydrauliqueDocument31 pagesCours N 2 HydrauliqueAndry AndrianantenainaPas encore d'évaluation
- Pompe HydrauliqueDocument24 pagesPompe HydrauliquesaidPas encore d'évaluation
- Les Éléments PneumatiquesDocument9 pagesLes Éléments PneumatiquesNicola VitulliPas encore d'évaluation
- Eclairage LED Collectivites Territoriales NeoluxDocument4 pagesEclairage LED Collectivites Territoriales Neoluxhajjouji100% (1)
- Cours Transformation de MouvementDocument10 pagesCours Transformation de MouvementAsma MoussaPas encore d'évaluation
- Chapitre 4- Les Actionneurs HydrauliquesDocument13 pagesChapitre 4- Les Actionneurs HydrauliquesMouilhi MouilhiPas encore d'évaluation
- 9433269Document10 pages9433269AyoubPas encore d'évaluation
- Verins PDFDocument28 pagesVerins PDFMalek BenBouYahiaPas encore d'évaluation
- Hydrau PDFDocument5 pagesHydrau PDFIkeoPas encore d'évaluation
- PCP - Motor de Fondo PerfDocument30 pagesPCP - Motor de Fondo Perfervin aranda arandaPas encore d'évaluation
- 25 11 2021 Cours Hydraulique PneumatiqueDocument11 pages25 11 2021 Cours Hydraulique PneumatiqueRodolphe Sounou100% (1)
- Ch24 Les Actionneurs HydrauliquesDocument2 pagesCh24 Les Actionneurs HydrauliquesMohamed Larbi100% (1)
- Le VerinDocument15 pagesLe VerinAbdoulaye Boua BERTHEPas encore d'évaluation
- VérinDocument7 pagesVérinnelson libalaPas encore d'évaluation
- ExpDocument10 pagesExpMr YannPas encore d'évaluation
- Etude HydroliquieDocument4 pagesEtude HydroliquieYosri JaddiPas encore d'évaluation
- Vérin - Wikipédia PDFDocument7 pagesVérin - Wikipédia PDFTahafanMaggedonPas encore d'évaluation
- 5 Actionneurs PneumatiquesDocument13 pages5 Actionneurs PneumatiquesMakki AbdellatifPas encore d'évaluation
- Chapitre 2 Calcul Et DimensionnementDocument13 pagesChapitre 2 Calcul Et Dimensionnementmalektouati28Pas encore d'évaluation
- S6 1 2 Dimensionnement Des Circuits PneumatiquesDocument11 pagesS6 1 2 Dimensionnement Des Circuits PneumatiquesKhamiss KhamissPas encore d'évaluation
- Chapitre 4 Verins HydrauliquesDocument12 pagesChapitre 4 Verins HydrauliquesYoucef MimouniPas encore d'évaluation
- CH 5 Pompage PhotovoltaiqueDocument18 pagesCH 5 Pompage PhotovoltaiqueInedit BFPas encore d'évaluation
- Exploitation Et Maintenance Des Pompes CentrifugesDocument134 pagesExploitation Et Maintenance Des Pompes Centrifugesmouad jaidanePas encore d'évaluation
- Verin Pneumatique GeneralDocument8 pagesVerin Pneumatique GeneralSeVILLA8Dz100% (1)
- Partie ThéoriqueDocument8 pagesPartie ThéoriquewissemPas encore d'évaluation
- 1 - Situation de La Fonction Générique Convertir L ÉnergieDocument9 pages1 - Situation de La Fonction Générique Convertir L ÉnergieYounss ÄýtPas encore d'évaluation
- Moteurs HydrauliquesDocument6 pagesMoteurs HydrauliquesKarem JebrilPas encore d'évaluation
- Exploitation Et Maintenance Des Pompes CentrifugesDocument134 pagesExploitation Et Maintenance Des Pompes Centrifugesmouad jaidanePas encore d'évaluation
- Technologie Des Pompes Centrifuges04362 - A - FDocument20 pagesTechnologie Des Pompes Centrifuges04362 - A - FWilson Njange100% (1)
- Cours Pompes MPSHDocument20 pagesCours Pompes MPSHDahi MohamedPas encore d'évaluation
- Pompe Hélico-CentrifugeDocument7 pagesPompe Hélico-CentrifugeMouhamed MaamouliPas encore d'évaluation
- Cours MAAM541Document35 pagesCours MAAM541DahPas encore d'évaluation
- CHAP Pompe WIRTHDocument11 pagesCHAP Pompe WIRTHMustaphaPas encore d'évaluation
- Convertir VérinsDocument3 pagesConvertir VérinsBALLOUK SoufianePas encore d'évaluation
- Transmissions de Puissance Hydrostatiques: 1 - GénéralitésDocument9 pagesTransmissions de Puissance Hydrostatiques: 1 - GénéralitésNassim RabaouiPas encore d'évaluation
- ANALYSE DE CIRCUITS PNEUMATIQUES, ELECTROPNEUMATIQUES, CH III PDFDocument53 pagesANALYSE DE CIRCUITS PNEUMATIQUES, ELECTROPNEUMATIQUES, CH III PDFabdouPas encore d'évaluation
- Chapitre 1 Les Circuits de Transport de LiquideDocument13 pagesChapitre 1 Les Circuits de Transport de LiquideBalloukPas encore d'évaluation
- Vérins Distributeurs Et Accessoires Pneumatiques PDFDocument25 pagesVérins Distributeurs Et Accessoires Pneumatiques PDFAbdeslam ElmrabetPas encore d'évaluation
- Les Machines A Courant ContinuDocument10 pagesLes Machines A Courant ContinuEpsp MedPas encore d'évaluation
- Mécanique Sur Sonde 02Document137 pagesMécanique Sur Sonde 02benh35585Pas encore d'évaluation
- Cour 02 ProDocument14 pagesCour 02 ProHâdjāb ÂymēnPas encore d'évaluation
- PompesDocument16 pagesPompeshamza benine100% (1)
- PompesDocument42 pagesPompesTimo Shmitt100% (2)
- CI6 Schemas Hydrauliques Et PneumatiquesDocument4 pagesCI6 Schemas Hydrauliques Et PneumatiquesBob MinkaPas encore d'évaluation
- Théorie et pratique du treuil: Treuils fixes et mobilesD'EverandThéorie et pratique du treuil: Treuils fixes et mobilesPas encore d'évaluation
- MHMH542 [complet]Document67 pagesMHMH542 [complet]Ahmed KhalilPas encore d'évaluation
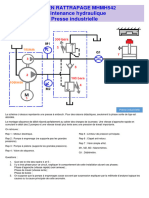
- EXAMEN RATTRAPAGE MHMH542 2021Document2 pagesEXAMEN RATTRAPAGE MHMH542 2021Ahmed KhalilPas encore d'évaluation
- guide_capacite3Document80 pagesguide_capacite3Ahmed KhalilPas encore d'évaluation
- Hydraulique proprtionnelleDocument97 pagesHydraulique proprtionnelleAhmed KhalilPas encore d'évaluation
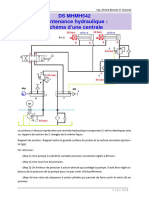
- DS MHMH542 semaine 15Document2 pagesDS MHMH542 semaine 15Ahmed KhalilPas encore d'évaluation
- Mini Projet RDM6Document10 pagesMini Projet RDM6kamalPas encore d'évaluation
- IntroductionDocument34 pagesIntroductionAhmed KhalilPas encore d'évaluation
- RDM Khemili 2021 Chap2 1Document33 pagesRDM Khemili 2021 Chap2 1Ahmed KhalilPas encore d'évaluation
- Cours RDM-Khemili 2023-Chap6Document15 pagesCours RDM-Khemili 2023-Chap6Ahmed KhalilPas encore d'évaluation
- Cours RDM Khemili 2019 Chap5Document12 pagesCours RDM Khemili 2019 Chap5Abir BøukërPas encore d'évaluation
- Cours rdm1Document18 pagesCours rdm1Mll RaghebPas encore d'évaluation
- Cours RDM-Khemili 2020-Chap1Document14 pagesCours RDM-Khemili 2020-Chap1Rossiny NganiPas encore d'évaluation
- Cours RDM-Khemili 2023-Chap2-2Document24 pagesCours RDM-Khemili 2023-Chap2-2Ahmed KhalilPas encore d'évaluation
- Cours RDM-Khemili 2023-Chap6Document15 pagesCours RDM-Khemili 2023-Chap6Ahmed KhalilPas encore d'évaluation
- Yoruba Dictionary PDFDocument458 pagesYoruba Dictionary PDFifadaiiroPas encore d'évaluation
- La ReverbDocument1 pageLa ReverbSilvain SygmaprodPas encore d'évaluation
- Introduction À L'ingénierie Maritime - Chapitre 4Document35 pagesIntroduction À L'ingénierie Maritime - Chapitre 4Naifar OnsPas encore d'évaluation
- Exercices Optique 10e PDFDocument41 pagesExercices Optique 10e PDFRené Andreescu100% (1)
- Courroie Motoculteur Tondeuse A Gazon 3l 4l 5lDocument6 pagesCourroie Motoculteur Tondeuse A Gazon 3l 4l 5lV8USKILLRMAZOUTPas encore d'évaluation
- Technique Oscultation Des Ouvrages Genie CivilDocument193 pagesTechnique Oscultation Des Ouvrages Genie Civilkabebern100% (1)
- Le Principe de PDCADocument20 pagesLe Principe de PDCAmilou88Pas encore d'évaluation
- GSM Important 2Document97 pagesGSM Important 2Tulipe PivoinePas encore d'évaluation
- Microsoft PowerPoint - Cours de PIC GénéralitésDocument17 pagesMicrosoft PowerPoint - Cours de PIC GénéralitésNor AlhoudaPas encore d'évaluation
- Liste Des Équipements Proposés Ligne RIDocument2 pagesListe Des Équipements Proposés Ligne RIZAHIRPas encore d'évaluation
- ConsignationDocument12 pagesConsignationdrevetph6233Pas encore d'évaluation
- Examen Des Calculs Hydrauliques AvancesDocument1 pageExamen Des Calculs Hydrauliques AvancesAlexis DjumaPas encore d'évaluation
- Comment Surligner Un PDFDocument2 pagesComment Surligner Un PDFEmilyPas encore d'évaluation
- Automobile: Et SécuritéDocument9 pagesAutomobile: Et SécuritéNermine AlaouiPas encore d'évaluation
- Elimax Fiche Technique Huisserie Capot DhuisserieDocument1 pageElimax Fiche Technique Huisserie Capot DhuisserieBenou DDPas encore d'évaluation
- SPM6700 Programmation PDFDocument1 pageSPM6700 Programmation PDFJulien CrochetPas encore d'évaluation
- Honda MotorsDocument33 pagesHonda MotorsHoussa'm SuiPas encore d'évaluation
- Ch23 Les Actionneurs PneumatiquesDocument4 pagesCh23 Les Actionneurs PneumatiquesLassaad ElmokhPas encore d'évaluation
- SADT Cours Etude Des Systemes 062016Document17 pagesSADT Cours Etude Des Systemes 062016Ben FahPas encore d'évaluation
- Exafaspirateur PDFDocument3 pagesExafaspirateur PDFAnasfilaPas encore d'évaluation
- Transformation EnergieDocument4 pagesTransformation EnergieOualid OuadoudiPas encore d'évaluation
- La Fibre OptiqueDocument13 pagesLa Fibre OptiquekikiPas encore d'évaluation


































































![MHMH542 [complet]](https://imgv2-1-f.scribdassets.com/img/document/726674161/149x198/a48825ea8b/1714070915?v=1)