Vous aimerez peut-être aussi
- Automatique: Les Grands Articles d'UniversalisD'EverandAutomatique: Les Grands Articles d'UniversalisPas encore d'évaluation
- Rapport AutomatiqueDocument15 pagesRapport AutomatiqueMariam SajidPas encore d'évaluation
- TP1 Et 2Document16 pagesTP1 Et 2Hanae MenounyPas encore d'évaluation
- TP ObservationDocument7 pagesTP Observationjob100% (2)
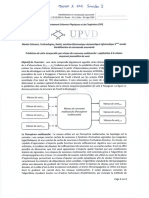
- 1-S2.0-S2212667813000385-Main FRDocument8 pages1-S2.0-S2212667813000385-Main FRJoël NoudjeuPas encore d'évaluation
- TD04Document0 pageTD04NeoXana01Pas encore d'évaluation
- Automatisme Commande Travaux Pratiques (29pages) 2006-2007Document29 pagesAutomatisme Commande Travaux Pratiques (29pages) 2006-2007Oliver TwistePas encore d'évaluation
- TP 1 DoughDocument9 pagesTP 1 Doughleo slegPas encore d'évaluation
- Enoncés Tpauto 2022 2023Document7 pagesEnoncés Tpauto 2022 2023Jj SimonPas encore d'évaluation
- TP Multivariable: Etude D'un Réservoir D'eau: Master: Contrôle, Informatique Industrielle, Signaux Et SystèmesDocument7 pagesTP Multivariable: Etude D'un Réservoir D'eau: Master: Contrôle, Informatique Industrielle, Signaux Et SystèmesSafaePas encore d'évaluation
- Chapitre 4Document39 pagesChapitre 4ridhajamel100% (1)
- 5 Commandabilité Retour D'étatDocument6 pages5 Commandabilité Retour D'étatNabil SaidaniPas encore d'évaluation
- Compte Rendu tp22222wdfDocument9 pagesCompte Rendu tp22222wdfMed EL JaouhariPas encore d'évaluation
- TP 5 Regulation TemperatureDocument4 pagesTP 5 Regulation TemperatureLuka MadridPas encore d'évaluation
- 10 PaulDocument22 pages10 Pauldanemsal0% (1)
- Correction de L'examenDocument5 pagesCorrection de L'examenMãrÿ ŌûmåPas encore d'évaluation
- 379Document12 pages379Mounir FrijaPas encore d'évaluation
- TP1 ComRobDocument3 pagesTP1 ComRobHazael BoodhramPas encore d'évaluation
- Abreviation Definition Et AnnexDocument9 pagesAbreviation Definition Et AnnexChaimaa BlkPas encore d'évaluation
- X DDCDDVFVDocument14 pagesX DDCDDVFVAdinko lo djonPas encore d'évaluation
- TD1 Ordo CorrigeDocument26 pagesTD1 Ordo CorrigeYassine RamliPas encore d'évaluation
- TP MatlabDocument29 pagesTP Matlabmed84% (19)
- La Regulation RSTDocument9 pagesLa Regulation RSTJordan WilsonPas encore d'évaluation
- TP Filtrrccr BtscimDocument8 pagesTP Filtrrccr BtscimYassino WickPas encore d'évaluation
- CH Architectures Matérielles DédiéesDocument24 pagesCH Architectures Matérielles DédiéesIMEN BENALIPas encore d'évaluation
- BacsDocument6 pagesBacsmassinisssa100% (1)
- TP3 Asservissement PDFDocument8 pagesTP3 Asservissement PDFYoucef BoukhalfaPas encore d'évaluation
- CCMP Info 2018 MesuredelahouleDocument11 pagesCCMP Info 2018 MesuredelahoulekhshkqPas encore d'évaluation
- td1 PDFDocument2 pagestd1 PDFmoipopPas encore d'évaluation
- Automatisation Des Systemes Industriels-2020 PDFDocument84 pagesAutomatisation Des Systemes Industriels-2020 PDFRamdani AhmedPas encore d'évaluation
- Insfp Medea Mem s4 Medea Le 03Document2 pagesInsfp Medea Mem s4 Medea Le 03Ismail KhelilPas encore d'évaluation
- Démodulation AM Par Boucle de Costas NumériqueDocument5 pagesDémodulation AM Par Boucle de Costas NumériqueCucuPas encore d'évaluation
- TP 1 Asservissement Et RégulationDocument9 pagesTP 1 Asservissement Et Régulationhoussemouazaa2003Pas encore d'évaluation
- Rapport Des Travaux PratiquesDocument33 pagesRapport Des Travaux PratiquesYassir EL AYYADIPas encore d'évaluation
- Ministère de LDocument28 pagesMinistère de Liheb MimouniPas encore d'évaluation
- Chapitre 3 Filtrage Signaux Deterministes Temps ContinuDocument7 pagesChapitre 3 Filtrage Signaux Deterministes Temps Continuarbaoui11Pas encore d'évaluation
- TD Comav 2020Document12 pagesTD Comav 2020Oussama LazebPas encore d'évaluation
- Bts Snec 2020 NC 1 SujetDocument40 pagesBts Snec 2020 NC 1 SujetkrommPas encore d'évaluation
- E2 1Document44 pagesE2 1marouane_mamoun6577Pas encore d'évaluation
- Odulation DE Argeur D' Mpulsion: Rojet 1999Document79 pagesOdulation DE Argeur D' Mpulsion: Rojet 1999Youcef Diaf100% (2)
- Auto IntroDocument16 pagesAuto IntroAli MEDJGHOUPas encore d'évaluation
- Moteur II BEZIA ZahiraDocument16 pagesMoteur II BEZIA ZahiraAyoub BeziaPas encore d'évaluation
- Cours D'automatique - Section 6-GEERDocument23 pagesCours D'automatique - Section 6-GEERSAAD SAID100% (1)
- TP Hanae FatihaDocument26 pagesTP Hanae FatihaHanae MenounyPas encore d'évaluation
- Cours Temps Reel In2-Nup-Nup PDFDocument104 pagesCours Temps Reel In2-Nup-Nup PDFspeedov73Pas encore d'évaluation
- Annexes ESI Du BTS IRIS 2012Document28 pagesAnnexes ESI Du BTS IRIS 2012GuillaumePas encore d'évaluation
- Tpn01 DiagDocument5 pagesTpn01 DiagAhmed Mehdi DALIPas encore d'évaluation
- TP Régulation de TempératureDocument10 pagesTP Régulation de TempératureHadia DjeltiPas encore d'évaluation
- Révision de Régulation .Document2 pagesRévision de Régulation .NADA MOUCHAYIAPas encore d'évaluation
- DS 2 MPSI Nov 2014 SujetDocument3 pagesDS 2 MPSI Nov 2014 SujetAnonymous JIjLxKYApNPas encore d'évaluation
- 04 Etapes de Description Testbench VlsiDocument4 pages04 Etapes de Description Testbench VlsiFabrice FotsoPas encore d'évaluation
- Examen SujetDocument3 pagesExamen SujetLaraig YoussefPas encore d'évaluation
- Presentation TipeDocument49 pagesPresentation TipeSalah GamerPas encore d'évaluation
- Les CapteurDocument5 pagesLes CapteurMohamed ElmahdiPas encore d'évaluation
- Systemes AsservisDocument6 pagesSystemes AsservisJalil AkaabounePas encore d'évaluation
- L3 AUTO AS611 CorrigéDocument3 pagesL3 AUTO AS611 CorrigéHanane RazzoukPas encore d'évaluation
- Maison Intelligente: Conception et réalisation d'une maison intelligenteD'EverandMaison Intelligente: Conception et réalisation d'une maison intelligenteÉvaluation : 4 sur 5 étoiles4/5 (5)
- 01 Cours AutomateDocument8 pages01 Cours Automatek9s9k9s9Pas encore d'évaluation
- TPno1 InitiationauxAutomatesProgrammablesIndustriels APISiemensS7 300Document6 pagesTPno1 InitiationauxAutomatesProgrammablesIndustriels APISiemensS7 300Lakhlifi AyoubPas encore d'évaluation
- Modelisation Et Commande Neuronale S1Document2 pagesModelisation Et Commande Neuronale S1Lakhlifi AyoubPas encore d'évaluation
- 1 - Variation de Vitesse de MAS - ElèveDocument7 pages1 - Variation de Vitesse de MAS - ElèveLakhlifi AyoubPas encore d'évaluation
- 2 MLI ElèveDocument3 pages2 MLI ElèveLakhlifi AyoubPas encore d'évaluation
- 3 - Controle Vectoriel de Flux - ElèveDocument2 pages3 - Controle Vectoriel de Flux - ElèveLakhlifi AyoubPas encore d'évaluation
- h3 TC Electricite Tr-Chapitre1a Tr-Chapitre5 2552Document37 pagesh3 TC Electricite Tr-Chapitre1a Tr-Chapitre5 2552Lakhlifi AyoubPas encore d'évaluation
- 1 - Depart Moteur Eleve-2Document28 pages1 - Depart Moteur Eleve-2Lakhlifi AyoubPas encore d'évaluation
- Automatique RegulationDocument148 pagesAutomatique RegulationAymen Chaaira100% (2)
- Comp Rend Re SQL AccessDocument4 pagesComp Rend Re SQL AccessLakhlifi AyoubPas encore d'évaluation
- Introduction À La RobotiqueDocument19 pagesIntroduction À La RobotiqueRazzougui SarahPas encore d'évaluation
- Process AciérieDocument6 pagesProcess Aciériesanae jaouiPas encore d'évaluation
- Exercice D'application Optique VDocument1 pageExercice D'application Optique VARDALAn MohamedPas encore d'évaluation
- Af Sen GaeDocument42 pagesAf Sen GaeعبداللهبنزنوPas encore d'évaluation
- Thèse Data IntegrityDocument83 pagesThèse Data IntegrityBasma YagoubiPas encore d'évaluation
- Exam. F.CDocument2 pagesExam. F.CmidsmasherPas encore d'évaluation
- ExcisionDocument54 pagesExcisionAbdou Razak OuédraogoPas encore d'évaluation
- Mesure de Compression Moteur Vers FinaleDocument46 pagesMesure de Compression Moteur Vers FinaleRaouf HarzallahPas encore d'évaluation
- RSE & EthiqueDocument6 pagesRSE & Ethiquealemor2369Pas encore d'évaluation
- Observatoire National de La Filiere Riz Du Burkina Faso (Onriz)Document6 pagesObservatoire National de La Filiere Riz Du Burkina Faso (Onriz)toni_yousf2418Pas encore d'évaluation
- Arval - Cofrastra 40Document16 pagesArval - Cofrastra 40helder.fradePas encore d'évaluation
- Cahier D Exercices Ile Aux Mots 8hDocument88 pagesCahier D Exercices Ile Aux Mots 8hCizPas encore d'évaluation
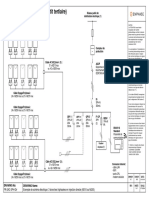
- 3 Branches Triphasées en Injection Directe M215 Ou M250Document1 page3 Branches Triphasées en Injection Directe M215 Ou M250MbgardPas encore d'évaluation
- The Cuban Missile CrisisDocument8 pagesThe Cuban Missile Crisismilan.bodis523Pas encore d'évaluation
- Prise en Main de Microsoft Office Excel 2016Document713 pagesPrise en Main de Microsoft Office Excel 2016max80% (5)
- AnnexeDocument168 pagesAnnexeMoez AliPas encore d'évaluation
- ALIZE LCPC MU v1.5 FR PDFDocument116 pagesALIZE LCPC MU v1.5 FR PDFSoumana Abdou100% (1)
- Les Étapes de Formation Des Roches SédimentaireDocument2 pagesLes Étapes de Formation Des Roches Sédimentairehamada2002Pas encore d'évaluation
- 2nd - Exercices Corrigés - Variations D'une FonctDocument1 page2nd - Exercices Corrigés - Variations D'une Fonctalyahmed610Pas encore d'évaluation
- Canalisations de Gaz NaturelDocument120 pagesCanalisations de Gaz NaturelJean-David DelordPas encore d'évaluation
- Marry Your Daughter Sheet - 1Document2 pagesMarry Your Daughter Sheet - 1Nurendung ZuliantoPas encore d'évaluation
- Caplp Externe Genie Electrique Electrotechnique Et Energie Epreuve 1 Doc RessourcesDocument28 pagesCaplp Externe Genie Electrique Electrotechnique Et Energie Epreuve 1 Doc RessourcesOus SàmàPas encore d'évaluation
- TP2Document4 pagesTP2Youssef Don RajawiPas encore d'évaluation
- Jadwal Genap 2223-2Document2 pagesJadwal Genap 2223-2nowo benyPas encore d'évaluation
- TFE Gustave KISHATU MWAMBA Version Finale-1Document112 pagesTFE Gustave KISHATU MWAMBA Version Finale-1gustave kishatu100% (2)
- Observons:: Nature Du Complément Circonstanciel de TempsDocument2 pagesObservons:: Nature Du Complément Circonstanciel de TempsMehdi YMPas encore d'évaluation
- Format Eur FrancaiseDocument1 pageFormat Eur FrancaiseAdnan NandaPas encore d'évaluation
- Analyse D'une Situation de Communication en TaDocument2 pagesAnalyse D'une Situation de Communication en Taroger martin bassong batiigPas encore d'évaluation
- 3 Partie Caractéristiques Des LubrifiantDocument32 pages3 Partie Caractéristiques Des Lubrifiantsamir belamriPas encore d'évaluation
- Exposé MDE Et Énergie RenouvelablesDocument12 pagesExposé MDE Et Énergie Renouvelablesromain fokamPas encore d'évaluation