Vous aimerez peut-être aussi
- Entraînement neuro-athlétique pour débutants Plus de coordination, de mobilité et de concentration grâce à l'amélioration de la neuro-athlétisation - plan de 10 semaines inclusD'EverandEntraînement neuro-athlétique pour débutants Plus de coordination, de mobilité et de concentration grâce à l'amélioration de la neuro-athlétisation - plan de 10 semaines inclusPas encore d'évaluation
- Cours BiomécaniqueDocument86 pagesCours BiomécaniquesalmaPas encore d'évaluation
- Bilan MusculaireDocument5 pagesBilan MusculairenaoPas encore d'évaluation
- CM 1 Et 2 Modelisation Biomecanique Du Corps Humain 2020 2021Document62 pagesCM 1 Et 2 Modelisation Biomecanique Du Corps Humain 2020 2021ARTHURPas encore d'évaluation
- Anatomie Biomecanique de CoudeDocument8 pagesAnatomie Biomecanique de CoudeMohammed GartitPas encore d'évaluation
- Anatomie Fonctionelle de L'epauleDocument61 pagesAnatomie Fonctionelle de L'epauleYassine MokaddemPas encore d'évaluation
- BiomecaniqueDocument35 pagesBiomecaniqueYounes Brouki100% (1)
- Anatomie Biomecanique de L'epaule MODIFIERDocument5 pagesAnatomie Biomecanique de L'epaule MODIFIERMohammed Gartit100% (1)
- Anatomie Généralités PDFDocument12 pagesAnatomie Généralités PDFHafssa El mesloutiPas encore d'évaluation
- RachisDocument39 pagesRachisJuliette THIBAUTPas encore d'évaluation
- Cinesiologie Du TroncDocument85 pagesCinesiologie Du TroncMjidKarimPas encore d'évaluation
- ANATOMIE Appliquée RésuméDocument20 pagesANATOMIE Appliquée RésuméSALMAN KHAYATIPas encore d'évaluation
- Generalites AnatDocument12 pagesGeneralites AnatMaroua BensariPas encore d'évaluation
- Cours Anat Creps YoanDocument46 pagesCours Anat Creps Yoantrompa.sidney100% (1)
- BiomecDocument19 pagesBiomecKamel Fedaoui0% (1)
- Biom Poignet MainDocument37 pagesBiom Poignet MainSamar OmraniPas encore d'évaluation
- MyologieDocument11 pagesMyologieYasmina MoussiPas encore d'évaluation
- Myologie Membre Thoracique (Épaule Et Bras)Document74 pagesMyologie Membre Thoracique (Épaule Et Bras)rania bouPas encore d'évaluation
- Anatonie Musculosqueletique Part1 PDFDocument42 pagesAnatonie Musculosqueletique Part1 PDFmanoelfreddy8100% (1)
- Pratique Membre SupDocument4 pagesPratique Membre SupBaptiste CarpentierPas encore d'évaluation
- Biomécanique GenouxDocument29 pagesBiomécanique GenouxMohammed GartitPas encore d'évaluation
- Anatomie Et Biomécanique de La ChevilleDocument23 pagesAnatomie Et Biomécanique de La ChevilleMohammed GartitPas encore d'évaluation
- Cinesiologie de La ChevilleDocument14 pagesCinesiologie de La ChevilleEbePas encore d'évaluation
- EPAULE 1. GénéralitésDocument10 pagesEPAULE 1. GénéralitésSO SabrinaPas encore d'évaluation
- Le RachisDocument12 pagesLe RachisGhars AdamPas encore d'évaluation
- Biomécanique Du MS - Fiche de RévisionDocument18 pagesBiomécanique Du MS - Fiche de RévisionCristina Mocan100% (1)
- Anatomie 1 Osteologie Arthrologie Et MylogieDocument12 pagesAnatomie 1 Osteologie Arthrologie Et MylogieFlorine BaillietPas encore d'évaluation
- Osteologie Du Membre InferieurDocument6 pagesOsteologie Du Membre InferieurTiktok CompilPas encore d'évaluation
- Biomécanique Du GenouDocument12 pagesBiomécanique Du Genoubbvnrsh279Pas encore d'évaluation
- Techniques de Renforcement Musculaire Amen Allah BelkhiriaDocument12 pagesTechniques de Renforcement Musculaire Amen Allah BelkhiriaBen Attaya MouhamedPas encore d'évaluation
- MyologieDocument201 pagesMyologielatifaPas encore d'évaluation
- Anatomie Du RachisDocument6 pagesAnatomie Du Rachisyoussef majdPas encore d'évaluation
- La Reeducation Pbve Fevrier08Document66 pagesLa Reeducation Pbve Fevrier08Alexis GoncalvesPas encore d'évaluation
- Fiche 12 - Gonio EpauleDocument10 pagesFiche 12 - Gonio EpauleJedidi AmirPas encore d'évaluation
- 1-Les MouvementsDocument7 pages1-Les Mouvementsapi-446600404Pas encore d'évaluation
- CHAPITRE 8. Le Membre Supérieur: A. La Ceinture ScapulaireDocument100 pagesCHAPITRE 8. Le Membre Supérieur: A. La Ceinture ScapulaireAbdelOuahidSenhadji100% (1)
- 1 - Le ThoraxDocument32 pages1 - Le ThoraxCat Burglar100% (1)
- 20 Genou BSM 2015Document137 pages20 Genou BSM 2015Book HunterPas encore d'évaluation
- BIOMECANIQUEDocument12 pagesBIOMECANIQUEnaelme ElPas encore d'évaluation
- Plexus Lombo-SacréDocument16 pagesPlexus Lombo-SacréMohammed Gartit100% (1)
- Myologie Du Membre Superieur: Pr. T. CoulibalyDocument76 pagesMyologie Du Membre Superieur: Pr. T. CoulibalyFatoumata TraoréPas encore d'évaluation
- L-Appareil Locomoteur 1Document41 pagesL-Appareil Locomoteur 1Trou BailPas encore d'évaluation
- Testing MusculaireDocument61 pagesTesting MusculaireAlphaPas encore d'évaluation
- Testing MusculaireDocument5 pagesTesting MusculaireNizar AkidPas encore d'évaluation
- Biomecanique Et Analyse de La MarcheDocument64 pagesBiomecanique Et Analyse de La Marcheti tiPas encore d'évaluation
- Anatomie Et Biomecanique Du RachisDocument24 pagesAnatomie Et Biomecanique Du Rachisbenben3150% (2)
- Cinesiologie Du CoudeDocument15 pagesCinesiologie Du CoudeLandry RimbaybarPas encore d'évaluation
- Anatomie Palpatoire N°10Document3 pagesAnatomie Palpatoire N°10ngpk9vzr5jPas encore d'évaluation
- Anatomie Biomecanique RachisDocument57 pagesAnatomie Biomecanique RachisMohammed Gartit100% (1)
- Mobilisation Postéro Antérieure Selon MaitlandDocument4 pagesMobilisation Postéro Antérieure Selon MaitlandAmir JedidiPas encore d'évaluation
- Bioméca Des DorsalesDocument4 pagesBioméca Des Dorsalescamille.delmotte83Pas encore d'évaluation
- EPAULEDocument64 pagesEPAULEMed DemPas encore d'évaluation
- Besancon 2013 ANDERHUBER ReeducationDocument49 pagesBesancon 2013 ANDERHUBER ReeducationIulian IvasciucPas encore d'évaluation
- 13 Le Complexe Articulaire de L'épauleDocument14 pages13 Le Complexe Articulaire de L'épauleAlphaPas encore d'évaluation
- 01 - Bilan Statique SubjectifDocument8 pages01 - Bilan Statique SubjectifGhinter100% (1)
- Otr Programme Reeducation Genou Lca FRDocument8 pagesOtr Programme Reeducation Genou Lca FRTalaourar HamzaPas encore d'évaluation
- 1-Anatomie HumaineDocument39 pages1-Anatomie Humainebenba RiadPas encore d'évaluation
- 2-Physiologie MusculaireDocument44 pages2-Physiologie MusculaireIslęm OuaribPas encore d'évaluation
- L'Epole de NageurDocument15 pagesL'Epole de NageurSO SabrinaPas encore d'évaluation
- 05 PARALYSIE OBSTETRICALE PLEXUS BRACHIAL Dehou-MahmoudiDocument36 pages05 PARALYSIE OBSTETRICALE PLEXUS BRACHIAL Dehou-MahmoudiHoussem EddinePas encore d'évaluation
- 2documents Soumis À L'appui de La Demande de Certificat de Sélection (A-1520-AF) (PDF Dynamique, 289 Ko)Document10 pages2documents Soumis À L'appui de La Demande de Certificat de Sélection (A-1520-AF) (PDF Dynamique, 289 Ko)Kariim DiíbPas encore d'évaluation
- 7 Travaille À SignéeDocument2 pages7 Travaille À SignéeKariim DiíbPas encore d'évaluation
- Demande D'évaluation Comparative Des Études Effectuées Hors Du QuébecDocument7 pagesDemande D'évaluation Comparative Des Études Effectuées Hors Du QuébecKariim DiíbPas encore d'évaluation
- 5 Pas ConcernéDocument2 pages5 Pas ConcernéKariim DiíbPas encore d'évaluation
- Tolérances de LaminageDocument7 pagesTolérances de LaminageKariim DiíbPas encore d'évaluation
- Lien D EE1 EE2 EE3Document6 pagesLien D EE1 EE2 EE3Kariim DiíbPas encore d'évaluation
- Toutes Mes Rédactions EE TCF CaDocument57 pagesToutes Mes Rédactions EE TCF CaKariim Diíb100% (2)
- TD Pharmacie Clinique HTADocument1 pageTD Pharmacie Clinique HTAKariim DiíbPas encore d'évaluation
- 2 - Cours Sur Les Antihypertenseurs (Mode de Compatibilité)Document18 pages2 - Cours Sur Les Antihypertenseurs (Mode de Compatibilité)Kariim DiíbPas encore d'évaluation
- CoagulationDocument57 pagesCoagulationKariim DiíbPas encore d'évaluation
- Uv 109 Entrainement Spe JudoDocument6 pagesUv 109 Entrainement Spe JudoKariim DiíbPas encore d'évaluation
- Toutes Mes Rédactions EE TCF Ca2Document11 pagesToutes Mes Rédactions EE TCF Ca2Kariim DiíbPas encore d'évaluation
- Examen TD Neurologie CorrDocument1 pageExamen TD Neurologie CorrKariim DiíbPas encore d'évaluation
- Définition Des AnticancéreuxDocument2 pagesDéfinition Des AnticancéreuxKariim DiíbPas encore d'évaluation
- Travaux Dirigés NeurologieDocument1 pageTravaux Dirigés NeurologieKariim DiíbPas encore d'évaluation
- Notions de SensationsDocument6 pagesNotions de SensationsKariim DiíbPas encore d'évaluation
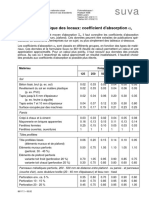
- Calculs d'acoustique des locaux: coefficient d'absorption α: Matériau Fréquence en Hz 125 250 500 1 000 2 000 4 000Document2 pagesCalculs d'acoustique des locaux: coefficient d'absorption α: Matériau Fréquence en Hz 125 250 500 1 000 2 000 4 000Kariim DiíbPas encore d'évaluation
- BHM ConstructionDocument1 pageBHM ConstructionKariim DiíbPas encore d'évaluation
- Introduction A La PsychologieDocument4 pagesIntroduction A La PsychologieKariim DiíbPas encore d'évaluation
- 588 PDFsam Code1Document12 pages588 PDFsam Code1castingmt2020Pas encore d'évaluation
- Devoir 1 Modele 7 Physique Chimie 3ac Semestre 2Document2 pagesDevoir 1 Modele 7 Physique Chimie 3ac Semestre 2Home erriahiPas encore d'évaluation
- Cours RouteDocument19 pagesCours Routeezzayyani najwaPas encore d'évaluation
- TD6 - Forces CentralesDocument4 pagesTD6 - Forces Centraleschedibensalem02Pas encore d'évaluation
- Physique 11 Mouvement Dans Champ Pesanteur Uniforme PDFDocument2 pagesPhysique 11 Mouvement Dans Champ Pesanteur Uniforme PDFAymenPas encore d'évaluation
- Chap1 GENERALITES PDFDocument10 pagesChap1 GENERALITES PDFAdams SamassiPas encore d'évaluation
- Chap.3 - CinematiqueDocument21 pagesChap.3 - CinematiqueAll AhmeDciaPas encore d'évaluation
- Serie 1 Cinematique TS1 2017 - 2018Document4 pagesSerie 1 Cinematique TS1 2017 - 2018PFE83% (6)
- P3 TD 2S CTD 2023-2024Document5 pagesP3 TD 2S CTD 2023-2024seckseckaPas encore d'évaluation
- BiomecaniqueDocument13 pagesBiomecaniqueRenaît Des cendresPas encore d'évaluation
- PDF Annales Examens Corrig S de M Canique Du Point SMPC Smia - CompressDocument63 pagesPDF Annales Examens Corrig S de M Canique Du Point SMPC Smia - Compressbihi.102.haytamPas encore d'évaluation
- ch05 Act Exp 1 MVT Champ PesanteurDocument2 pagesch05 Act Exp 1 MVT Champ PesanteurEmma GALESPas encore d'évaluation
- Pendule Horizontal Et Vertical PDFDocument8 pagesPendule Horizontal Et Vertical PDFMOSTAFAPas encore d'évaluation
- PH 2 ExostsDocument3 pagesPH 2 ExostsNajimou Alade TidjaniPas encore d'évaluation
- 1cm42j5r4 789539Document3 pages1cm42j5r4 789539BiramPas encore d'évaluation
- 1ER-PC-CHAP 11 ExercicesDocument43 pages1ER-PC-CHAP 11 Exercicesarthur pasquetPas encore d'évaluation
- DS N°3 - Banc D'épreuve Hydraulique (Corrigé) PDFDocument8 pagesDS N°3 - Banc D'épreuve Hydraulique (Corrigé) PDFElmehdi ElmessaoudiPas encore d'évaluation
- Workshop Séquence 6 - Méthodes NumériquesDocument5 pagesWorkshop Séquence 6 - Méthodes NumériquesBoboy YOUSSAOU ISMAILAPas encore d'évaluation
- 4 5787389575760449202Document2 pages4 5787389575760449202Sadat CissePas encore d'évaluation
- PC Sujet 1 BAC D Blanc 2023Document4 pagesPC Sujet 1 BAC D Blanc 2023Aaron KouamianPas encore d'évaluation
- ATV12 Régulation Pour FaqDocument7 pagesATV12 Régulation Pour FaqAhmed123Pas encore d'évaluation
- Examen National Physique Chimie SPC 2014 Normale SujetDocument7 pagesExamen National Physique Chimie SPC 2014 Normale SujetaarabkholoudPas encore d'évaluation
- Chapitre 7 - Cinétique ChimiqueDocument9 pagesChapitre 7 - Cinétique ChimiqueBeatrice Florin100% (4)
- TD2 Composition de MouvementDocument3 pagesTD2 Composition de MouvementimadPas encore d'évaluation
- Ilovepdf MergedDocument15 pagesIlovepdf MergedProf STEFANOPas encore d'évaluation
- TurboDocument22 pagesTurboAhmed BhaPas encore d'évaluation
- Dynamique: Exercice A Différentes Forces de Frottement Exercice ADocument2 pagesDynamique: Exercice A Différentes Forces de Frottement Exercice AboustakatbPas encore d'évaluation
- Bepc Blanc LM DiaboDocument3 pagesBepc Blanc LM Diabokouassi hermann ulrich koffiPas encore d'évaluation
- Chapitre 12 Champ UniformeDocument7 pagesChapitre 12 Champ UniformeSoumana SoufianePas encore d'évaluation
- TD Lorentz 2019 LSLL WahabdiopDocument4 pagesTD Lorentz 2019 LSLL Wahabdiopbip100% (1)
- Production et propagation des sons: Les Grands Articles d'UniversalisD'EverandProduction et propagation des sons: Les Grands Articles d'UniversalisPas encore d'évaluation
- Bioénergie et Sciences Occultes: Pour un corps sain et un esprit sain dans un lieu sainD'EverandBioénergie et Sciences Occultes: Pour un corps sain et un esprit sain dans un lieu sainÉvaluation : 4 sur 5 étoiles4/5 (2)
- Physique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresD'EverandPhysique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresÉvaluation : 5 sur 5 étoiles5/5 (2)
- Harmonisation Energétique des Personnes: Manuel de Curothérapie 2020D'EverandHarmonisation Energétique des Personnes: Manuel de Curothérapie 2020Évaluation : 4 sur 5 étoiles4/5 (8)
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsD'EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Le profilage au service du football: Démarche scientifique pour un recrutement et entraînements optimisésD'EverandLe profilage au service du football: Démarche scientifique pour un recrutement et entraînements optimisésPas encore d'évaluation
- Théorie relative de la musique: Maîtriser le mouvement par la logique des intervallesD'EverandThéorie relative de la musique: Maîtriser le mouvement par la logique des intervallesÉvaluation : 4 sur 5 étoiles4/5 (1)
- La pensée dirigée: Traité sur le raisonnement et les logiquesD'EverandLa pensée dirigée: Traité sur le raisonnement et les logiquesÉvaluation : 5 sur 5 étoiles5/5 (2)
- L'Ombre à l'Univers: La structure des particules élémentaires XIIfD'EverandL'Ombre à l'Univers: La structure des particules élémentaires XIIfPas encore d'évaluation
- le Phoenix de nos âmes: Les lois énergétiques de la lumière divineD'Everandle Phoenix de nos âmes: Les lois énergétiques de la lumière divinePas encore d'évaluation
- Un régime quantiqueD'EverandUn régime quantiqueÉvaluation : 5 sur 5 étoiles5/5 (1)
- La Conscience Et L'Univers Existent Sans Commencement Ni FinD'EverandLa Conscience Et L'Univers Existent Sans Commencement Ni FinPas encore d'évaluation
- Voyager à Travers les Mondes Parallèles pour Atteindre vos RêvesD'EverandVoyager à Travers les Mondes Parallèles pour Atteindre vos RêvesÉvaluation : 4 sur 5 étoiles4/5 (11)
- Sur les fondements de la théorie des ensembles transfinisD'EverandSur les fondements de la théorie des ensembles transfinisPas encore d'évaluation
- L'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.D'EverandL'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.Pas encore d'évaluation
- La somme existentielle II/III Le mystère de l'homme: Un mystère d'amourD'EverandLa somme existentielle II/III Le mystère de l'homme: Un mystère d'amourPas encore d'évaluation
- Historique et description des procédés du daguerréotype et du diorama: Essai historique sur les sciences et techniquesD'EverandHistorique et description des procédés du daguerréotype et du diorama: Essai historique sur les sciences et techniquesPas encore d'évaluation
- Saturne: Les Grands Articles d'UniversalisD'EverandSaturne: Les Grands Articles d'UniversalisPas encore d'évaluation