Vous aimerez peut-être aussi
- Cour Oscillations Libres 2ddl 1Document5 pagesCour Oscillations Libres 2ddl 1Hazhaz MedhiPas encore d'évaluation
- Cour Oscillations Libres 2ddl 2Document5 pagesCour Oscillations Libres 2ddl 2Anfel AbPas encore d'évaluation
- Cour Complet Oscillations Forcées 1DDLDocument5 pagesCour Complet Oscillations Forcées 1DDLAnya Hernafi100% (1)
- 2DDL 7Document2 pages2DDL 7Abdennour Aimene AmraniPas encore d'évaluation
- TAF 2 Calcul Dynamique - Watsop Piankeu Noel - 16G03301Document9 pagesTAF 2 Calcul Dynamique - Watsop Piankeu Noel - 16G03301watsopPas encore d'évaluation
- Résumé Des Formulations Pour DDSDocument5 pagesRésumé Des Formulations Pour DDSE-skills CorporationPas encore d'évaluation
- Ondes Et VibrationsDocument2 pagesOndes Et VibrationsJuanDeagDZPas encore d'évaluation
- 2DDL 1Document2 pages2DDL 1hamzabenaldjia22Pas encore d'évaluation
- Solution Examen 20-2 1Document3 pagesSolution Examen 20-2 1FaroukPas encore d'évaluation
- Essai de FlexionDocument15 pagesEssai de FlexionISMAIL EL KHADDARPas encore d'évaluation
- Optimisation Sans ContraintesDocument7 pagesOptimisation Sans ContraintesWarPas encore d'évaluation
- Mini-Projet Plaques Et CoquesDocument10 pagesMini-Projet Plaques Et CoquesSimo AkPas encore d'évaluation
- Eamac Physique IngDocument38 pagesEamac Physique Ingabdoulkarimouedraogo5589Pas encore d'évaluation
- Corrige-Iford Voie A 2019 Maths PDFDocument6 pagesCorrige-Iford Voie A 2019 Maths PDFChancelin KeukouaPas encore d'évaluation
- TP N°3: Oscillations D'un Systeme Couple A Deux Degres de LiberteDocument8 pagesTP N°3: Oscillations D'un Systeme Couple A Deux Degres de LiberteAzOu DzPas encore d'évaluation
- Solution Exo 7-8-9Document6 pagesSolution Exo 7-8-9ssam cefPas encore d'évaluation
- TP 3 Phy 3Document13 pagesTP 3 Phy 3hbelalouiPas encore d'évaluation
- Chapitre 3 PDFDocument9 pagesChapitre 3 PDFwissam bellilPas encore d'évaluation
- TD 3 Dynamique Du Point MaterielDocument34 pagesTD 3 Dynamique Du Point Materielbhtqtkvk8qPas encore d'évaluation
- Solution D'examDocument4 pagesSolution D'examJalal TiYalPas encore d'évaluation
- Devoir de Maison Statistique - David KEGBE - HydromécaniqueDocument9 pagesDevoir de Maison Statistique - David KEGBE - HydromécaniqueDavid KEGBEPas encore d'évaluation
- A ImprimerDocument34 pagesA Imprimerfounè diassanaPas encore d'évaluation
- Serie 5Document1 pageSerie 5redouane.boulerouahPas encore d'évaluation
- 11 PDFDocument2 pages11 PDFBrsioft BloggerPas encore d'évaluation
- Corrigé CC1-1 Reseaux ElectriqueDocument7 pagesCorrigé CC1-1 Reseaux Electriquemohamedhoussam62Pas encore d'évaluation
- Chapitre IIDocument4 pagesChapitre IIdihia didaPas encore d'évaluation
- TD2 L1-MPI CHP Pot Cdteurs 2020-2021Document12 pagesTD2 L1-MPI CHP Pot Cdteurs 2020-2021Ibrahima SkPas encore d'évaluation
- Cours Mécanique Quantique L2 Chap 4 NewDocument12 pagesCours Mécanique Quantique L2 Chap 4 NewFabrice ArriaPas encore d'évaluation
- Corrige TD1Document3 pagesCorrige TD1Nawres MsakniPas encore d'évaluation
- CC Electromagnetisme 1Document11 pagesCC Electromagnetisme 1yvan dokoloPas encore d'évaluation
- Molecule H2 PlusDocument5 pagesMolecule H2 PlusCHEIKH ABDOUL AZIZ H'MEIDYPas encore d'évaluation
- Compte Rendu TP6 - Osvaldo-CamaraDocument13 pagesCompte Rendu TP6 - Osvaldo-CamaraDéborah LuiraPas encore d'évaluation
- MQ2 TDC Schrodinger PotentielDocument16 pagesMQ2 TDC Schrodinger PotentielallabryanzePas encore d'évaluation
- Contrôle 1Document4 pagesContrôle 1abdelwahabPas encore d'évaluation
- Correction Série de Révision Exercice 1 Et 2Document4 pagesCorrection Série de Révision Exercice 1 Et 2Wael MaatougPas encore d'évaluation
- Correction Des Concours 2011 2019Document36 pagesCorrection Des Concours 2011 2019M100% (8)
- MQ1 TDC Schrodinger LibreDocument15 pagesMQ1 TDC Schrodinger LibreallabryanzePas encore d'évaluation
- Série de TD N Math 5Document6 pagesSérie de TD N Math 5The Algerianman100% (1)
- Ejercicio de Modelado MecánicoDocument2 pagesEjercicio de Modelado MecánicoMaria LmPas encore d'évaluation
- Corrigé de TP Et Interro Math 2A (Suite)Document6 pagesCorrigé de TP Et Interro Math 2A (Suite)Didier MBATU MBOMVUPas encore d'évaluation
- DS2 MP2I CorrigéDocument7 pagesDS2 MP2I CorrigéRoman DabrowskiPas encore d'évaluation
- Mécanque Quantique I - Corrigé TD 2 - 1Document6 pagesMécanque Quantique I - Corrigé TD 2 - 1fatima benfrihaPas encore d'évaluation
- CorrectionTD2 2017-2018 Traitement Du Signal LicenceDocument11 pagesCorrectionTD2 2017-2018 Traitement Du Signal LicenceMartine KenfackPas encore d'évaluation
- Chapitre 4 PHDocument8 pagesChapitre 4 PHDib YassinPas encore d'évaluation
- Devoir N°1 - S2 - 22 - 23 - Tle DDocument6 pagesDevoir N°1 - S2 - 22 - 23 - Tle DTrazer Gang OfficielPas encore d'évaluation
- Controle Méca II 2019 Corrigé PDFDocument9 pagesControle Méca II 2019 Corrigé PDFDim LifyPas encore d'évaluation
- Ta4 Fonction LogarithmeDocument4 pagesTa4 Fonction LogarithmeCrepin BAKATRAPas encore d'évaluation
- TPMCC Auriol Idriss ElliottDocument13 pagesTPMCC Auriol Idriss Elliottoteme Mbella King DuclairPas encore d'évaluation
- Chapitre 2 - Varietes Et Coordonnees Geometrie I-1Document8 pagesChapitre 2 - Varietes Et Coordonnees Geometrie I-1hessoul100% (1)
- Chapitre 3 Commandabilitéet Observabilitédes Systèmes LinéairesDocument5 pagesChapitre 3 Commandabilitéet Observabilitédes Systèmes LinéairesSalim BouaziziPas encore d'évaluation
- Chap2 Cours PDFDocument19 pagesChap2 Cours PDFMohamed Akli IDIRPas encore d'évaluation
- Chapitre III - Méthodes Itératives de Résolution de Systèmes LinéairesDocument3 pagesChapitre III - Méthodes Itératives de Résolution de Systèmes LinéairesMounaim MatiniPas encore d'évaluation
- Rapport de TP ScilabDocument4 pagesRapport de TP Scilabmounir boumezragPas encore d'évaluation
- Exo 5 Serie 1Document16 pagesExo 5 Serie 1Zack MahmoudiPas encore d'évaluation
- Les Oscillateurs MecaniquesDocument74 pagesLes Oscillateurs Mecaniquesahmed kitariPas encore d'évaluation
- Solution de Fiche TD4Document6 pagesSolution de Fiche TD4star1coachPas encore d'évaluation
- TD Série 3Document16 pagesTD Série 3Drissi Chihab100% (5)
- Exponentielle 1Document2 pagesExponentielle 1aminintPas encore d'évaluation
- Analyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2D'EverandAnalyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2Pas encore d'évaluation
- Guide Encadrer Un Memoire de Recherche Et Ou Un Rapport D ExpertiseDocument4 pagesGuide Encadrer Un Memoire de Recherche Et Ou Un Rapport D ExpertiseAnfel AbPas encore d'évaluation
- 2 - Séries de FonctionsDocument4 pages2 - Séries de FonctionsAnfel AbPas encore d'évaluation
- Devoir Maison Section HydDocument1 pageDevoir Maison Section HydAnfel AbPas encore d'évaluation
- Version 1 - Corrigé - EF de MR - Févier 22Document4 pagesVersion 1 - Corrigé - EF de MR - Févier 22Anfel AbPas encore d'évaluation
- 2 - Intégrales DoublesDocument17 pages2 - Intégrales DoublesAnfel AbPas encore d'évaluation
- Correction Devoir Sur Les Nombres PremiersDocument1 pageCorrection Devoir Sur Les Nombres PremiersAnfel AbPas encore d'évaluation
- Série MatricesDocument1 pageSérie MatricesAnfel AbPas encore d'évaluation
- Test MATLABDocument1 pageTest MATLABAnfel AbPas encore d'évaluation
- Exercices MDC 1 - 2lic TP+GCDocument3 pagesExercices MDC 1 - 2lic TP+GCAnfel AbPas encore d'évaluation
- TFM Marocetude - Com M15 Resistance Des materiaux-FM-TFMDocument67 pagesTFM Marocetude - Com M15 Resistance Des materiaux-FM-TFMdiaoPas encore d'évaluation
- Correction Devoir TPDocument3 pagesCorrection Devoir TPAnfel AbPas encore d'évaluation
- Calcul de ProbabilitasDocument9 pagesCalcul de ProbabilitasAnfel AbPas encore d'évaluation
- Chapitre II Statique Des fluides-FOUCHALDocument15 pagesChapitre II Statique Des fluides-FOUCHALAnfel AbPas encore d'évaluation
- Fichier Sript Et FonctionDocument1 pageFichier Sript Et FonctionAnfel AbPas encore d'évaluation
- Série1 Exo6Document16 pagesSérie1 Exo6Anfel AbPas encore d'évaluation
- CHAP22Document18 pagesCHAP22Anfel AbPas encore d'évaluation
- CHAP11Document21 pagesCHAP11Anfel AbPas encore d'évaluation
- Nicholas Ma - Happy Birthday But 13 Classical Composers Are Fighting Over The Last Slice of CakeDocument22 pagesNicholas Ma - Happy Birthday But 13 Classical Composers Are Fighting Over The Last Slice of Cake문태일방구문방구100% (2)
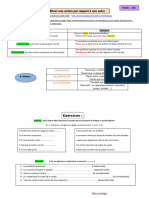
- Public: 2AC: Activité de Langue: Situer Une Action Par Rapport À Une AutreDocument2 pagesPublic: 2AC: Activité de Langue: Situer Une Action Par Rapport À Une AutreNatalia GalasPas encore d'évaluation
- 20764C - 00.en - FR.PPTX (Réparé)Document22 pages20764C - 00.en - FR.PPTX (Réparé)Huols4mPas encore d'évaluation
- 1er Livret 40 Jours de Penitence, Careme 2022.Document50 pages1er Livret 40 Jours de Penitence, Careme 2022.Renald MegnanPas encore d'évaluation
- Le Fonctionnement en Interruption 1Document2 pagesLe Fonctionnement en Interruption 1maoukil ayoubPas encore d'évaluation
- Verbes Irréguliers Au SubjonctifDocument2 pagesVerbes Irréguliers Au SubjonctifNouri38100% (11)
- Installation D'adobe Acrobat Reader Sous WindowsDocument10 pagesInstallation D'adobe Acrobat Reader Sous WindowsNiane Technologie (NTechSN)Pas encore d'évaluation
- PROJET-de Cycle de Vie D'une Activite Sous AndroidDocument6 pagesPROJET-de Cycle de Vie D'une Activite Sous AndroidEmile LoviPas encore d'évaluation
- Sequence1 4eme MaupassantDocument29 pagesSequence1 4eme MaupassantAndressa KhouryPas encore d'évaluation
- B53 3070 - Aços Planos Laminados A Quente Ou A FrioDocument8 pagesB53 3070 - Aços Planos Laminados A Quente Ou A FrioThiago SilvaPas encore d'évaluation
- Com OptiDocument57 pagesCom OptiImhere TohelpPas encore d'évaluation
- 01 - Brochure 2017Document156 pages01 - Brochure 2017angel daunePas encore d'évaluation
- Les Fiures de Style Dans Souffle de Pétales de Faiza AcitniDocument83 pagesLes Fiures de Style Dans Souffle de Pétales de Faiza Acitnikaoutar whbPas encore d'évaluation
- Dictees CM1 CM2 Periode 4Document3 pagesDictees CM1 CM2 Periode 4cheikhatthiombanePas encore d'évaluation
- Microsoft Official Course: Déploiement Et Gestion de Windows Server 2012Document38 pagesMicrosoft Official Course: Déploiement Et Gestion de Windows Server 2012ZaimPas encore d'évaluation
- Dzexams 1am Francais d1 20181 165936Document2 pagesDzexams 1am Francais d1 20181 165936Zêdka Châmàýtô100% (1)
- Activité 6 Verbes en - ErDocument2 pagesActivité 6 Verbes en - ErJIMMY ALEJANDRO LOAIZA100% (1)
- Annales D'examensDocument22 pagesAnnales D'examensyassinePas encore d'évaluation
- Contrôle Histoire Chapitre 5Document2 pagesContrôle Histoire Chapitre 5lucas.garnier54200Pas encore d'évaluation
- UEF611 Chapitre 3 Analyse Dans Lespace Détat Des Systèmes 2020Document29 pagesUEF611 Chapitre 3 Analyse Dans Lespace Détat Des Systèmes 2020Arrow ArrowPas encore d'évaluation
- Porteur de Vie GratuitDocument98 pagesPorteur de Vie GratuitNy Laza Alexias RandrianoelinaPas encore d'évaluation
- Linkbelt Telescopic Truck Crane HTC 8650 Service ManualDocument22 pagesLinkbelt Telescopic Truck Crane HTC 8650 Service Manualquvuxu1987100% (2)
- LA Part Du Politique Dans L'attentat de Yassmina KHADRADocument62 pagesLA Part Du Politique Dans L'attentat de Yassmina KHADRAChérine HassanPas encore d'évaluation
- CE6-Les Premiers Concepts de La GéométrieDocument2 pagesCE6-Les Premiers Concepts de La GéométrieRachid Bensalim (team nethers)Pas encore d'évaluation
- Tp1-Installation Et Configuration de Base de Windows 2019 ServerDocument2 pagesTp1-Installation Et Configuration de Base de Windows 2019 ServerAyman Tijani100% (2)
- PremiereNSI TD Rurple 2021Document4 pagesPremiereNSI TD Rurple 2021Abdelhak FadiliPas encore d'évaluation
- Éperonner Le Monde. Nomadisme, Cosmos Et Politique Chez Les TouaregsDocument202 pagesÉperonner Le Monde. Nomadisme, Cosmos Et Politique Chez Les TouaregsHafizShirazi80% (5)
- Cryptographie Et Algorithmique: Table Des MatièresDocument15 pagesCryptographie Et Algorithmique: Table Des MatièresTeuma Mbezi MichelPas encore d'évaluation
- Exercice 2Document28 pagesExercice 2charlotte fernandesPas encore d'évaluation
- Synthese Construire Le Nombre A La MaternelleDocument5 pagesSynthese Construire Le Nombre A La MaternelleJosephine Jasko100% (1)