Vous aimerez peut-être aussi
- Le système d'approvisionnement en terres dans les villes d'Afrique de l'Ouest: L’exemple de BamakoD'EverandLe système d'approvisionnement en terres dans les villes d'Afrique de l'Ouest: L’exemple de BamakoPas encore d'évaluation
- Cours GrafcetDocument16 pagesCours GrafcetSalah DaPas encore d'évaluation
- Cours Grafcet Sommaire: Les Notions de BaseDocument37 pagesCours Grafcet Sommaire: Les Notions de BasePaul DayangPas encore d'évaluation
- Le GrafcetDocument7 pagesLe GrafcetkldmntPas encore d'évaluation
- Ch3 Systemes Sequentiels GrafcetDocument24 pagesCh3 Systemes Sequentiels GrafcetAnas TounsiPas encore d'évaluation
- Le Grafcet v2k5 - ProfDocument35 pagesLe Grafcet v2k5 - ProfhatimjPas encore d'évaluation
- Graf CetDocument18 pagesGraf CetNgom Cheikh Ibrahima FallPas encore d'évaluation
- GrafcetDocument16 pagesGrafcethamdi jihenPas encore d'évaluation
- Traitement Des Lingots-TD g7Document16 pagesTraitement Des Lingots-TD g7Boutch NkgPas encore d'évaluation
- Grafcet Exercice Corrigé 01Document5 pagesGrafcet Exercice Corrigé 01walidPas encore d'évaluation
- 6 Exercices SEDDocument17 pages6 Exercices SEDPoupée De SoiePas encore d'évaluation
- TD Grafcet 2Document3 pagesTD Grafcet 2Anonymous Charon0% (1)
- Rappels GrafcetDocument44 pagesRappels GrafcetAbdallah BelabbesPas encore d'évaluation
- Robot GrafcetDocument4 pagesRobot GrafcetYassine LazragPas encore d'évaluation
- TD1-Informatique Industrielle-2020-2021Document11 pagesTD1-Informatique Industrielle-2020-2021Hassan OuchenPas encore d'évaluation
- Grafcet PDFDocument16 pagesGrafcet PDFHamza AlmobarakiPas encore d'évaluation
- 3 - GemmaDocument25 pages3 - GemmaBrahim Aljjaou0% (1)
- Devoir Surveillé Autom2 2022Document8 pagesDevoir Surveillé Autom2 2022Aftaab H. RaheemanPas encore d'évaluation
- Supervision Industrielle+Document39 pagesSupervision Industrielle+gbdPas encore d'évaluation
- Exercice de GRAFCET Avec Solution - TextmarkDocument5 pagesExercice de GRAFCET Avec Solution - TextmarkNabil AyoubPas encore d'évaluation
- TD1 Grafcet MP 2021-2022Document6 pagesTD1 Grafcet MP 2021-2022Maha BouattourPas encore d'évaluation
- TPSIMG7-ex5 2Document3 pagesTPSIMG7-ex5 2AradPas encore d'évaluation
- TPensachageDocument2 pagesTPensachageNicola Aborjayle100% (1)
- Cira1 - 4) Grafcet PDFDocument11 pagesCira1 - 4) Grafcet PDFLANGO RICHARD BAMBAPas encore d'évaluation
- Armoire TGBTDocument4 pagesArmoire TGBTmohamed_amri100Pas encore d'évaluation
- Découverte Platform Node RedDocument19 pagesDécouverte Platform Node RedHajar ElattariPas encore d'évaluation
- Grafcet À Séquence Simultanées CorrigéDocument4 pagesGrafcet À Séquence Simultanées CorrigéAbdeljalil AbdoPas encore d'évaluation
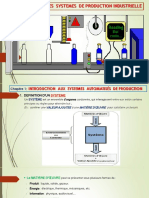
- 01 - CHP 1 - Introduction Aux Systèmes Automatisés de Production (3A-MEM 2023)Document20 pages01 - CHP 1 - Introduction Aux Systèmes Automatisés de Production (3A-MEM 2023)Panel NguessanPas encore d'évaluation
- Programmation Des API Part - 1Document34 pagesProgrammation Des API Part - 1sami bmPas encore d'évaluation
- Robot Td1 P CoorDocument1 pageRobot Td1 P CoorHaitamElbathaoui0% (1)
- API Rapport TPDocument14 pagesAPI Rapport TPElglitia MohamedPas encore d'évaluation
- Exercice 1: Monte-Charge: 1 N. Kabbaj, Automates Programmables Industriels 2015Document17 pagesExercice 1: Monte-Charge: 1 N. Kabbaj, Automates Programmables Industriels 2015wsrfcvPas encore d'évaluation
- GrafcetDocument8 pagesGrafcetbasma100% (1)
- Grafcet Elt 5 PDFDocument3 pagesGrafcet Elt 5 PDFnawzatPas encore d'évaluation
- ScieautoDocument5 pagesScieautoKhalil BelghiyatiPas encore d'évaluation
- Corrigé Des TDDocument15 pagesCorrigé Des TDTarik AllaliPas encore d'évaluation
- DevoirDocument2 pagesDevoirAyoub Mouih100% (1)
- Programmation Des API Cours GoodDocument10 pagesProgrammation Des API Cours GoodZakaryae HabibPas encore d'évaluation
- Efm Aii M15 2015-2016Document2 pagesEfm Aii M15 2015-2016Issam DhaichiPas encore d'évaluation
- Grafcet: Animation de Grafcets Avec Séquences Et Alternées Et SimultanéesDocument8 pagesGrafcet: Animation de Grafcets Avec Séquences Et Alternées Et SimultanéesAFADPas encore d'évaluation
- Mini-Projet Automatisme Séquentiel SR4Document9 pagesMini-Projet Automatisme Séquentiel SR4mohamed lachhabPas encore d'évaluation
- Exercice 1Document4 pagesExercice 1Anis AissaouiPas encore d'évaluation
- AutomogenDocument508 pagesAutomogenyabiladiPas encore d'évaluation
- Memoire MassiDocument120 pagesMemoire Massibouslimane idirPas encore d'évaluation
- M204 Controleur Chapitre3 ModifiéDocument32 pagesM204 Controleur Chapitre3 Modifiéahmad ahmadPas encore d'évaluation
- E Logique CombDocument5 pagesE Logique CombErragueb Moussaoui IdrissiPas encore d'évaluation
- Exercice D'application PDFDocument5 pagesExercice D'application PDFJelly GiroudPas encore d'évaluation
- L27 C To API (LADDER GFAFCET)Document63 pagesL27 C To API (LADDER GFAFCET)Eylul MoodPas encore d'évaluation
- Correction Manuel D'activité 20-39Document20 pagesCorrection Manuel D'activité 20-39Oula F'zPas encore d'évaluation
- 6 GemmaDocument5 pages6 GemmaSerge RINAUDOPas encore d'évaluation
- Cours Automatisme Industriel 2Document57 pagesCours Automatisme Industriel 2Refka KaabiPas encore d'évaluation
- Chapiter IDocument13 pagesChapiter IBouznad Houssem EddinePas encore d'évaluation
- Chapitre 1 Les Transmissions FluidesDocument15 pagesChapitre 1 Les Transmissions FluidesAYOUB MAMAOUI100% (1)
- 10 - Prehension Par Le Vide - EleveDocument2 pages10 - Prehension Par Le Vide - EleveMoncef NemriPas encore d'évaluation
- Bloc Compteur s7 PDFDocument3 pagesBloc Compteur s7 PDFNabilBouabanaPas encore d'évaluation
- Correc ExamenDocument3 pagesCorrec Examendinou samirPas encore d'évaluation
- CH 2 - GrafcetDocument5 pagesCH 2 - GrafcetAbdelhadi AZPas encore d'évaluation
- Cours Systemes À Evenements DiscretsDocument44 pagesCours Systemes À Evenements Discretsbendjeddou ammarPas encore d'évaluation
- Chapitre II Le GrafcetDocument16 pagesChapitre II Le Grafcetsociété ettrisiti oulad fares100% (1)
- Cours Info - IndustrielDocument33 pagesCours Info - IndustrielAbdallah BelabbesPas encore d'évaluation
- Synthèse: Le Parnasse: Dates (Approximatives)Document1 pageSynthèse: Le Parnasse: Dates (Approximatives)Pape BoyePas encore d'évaluation
- PoésieDocument1 pagePoésiePape BoyePas encore d'évaluation
- Role de L'écrivainDocument1 pageRole de L'écrivainPape BoyePas encore d'évaluation
- Poesie 2001 CorrigéDocument1 pagePoesie 2001 CorrigéPape Boye100% (1)
- CitationsDocument3 pagesCitationsPape Boye100% (1)
- UntitledDocument1 pageUntitledPape BoyePas encore d'évaluation
- Contemplations VictorHugoDocument2 pagesContemplations VictorHugoPape BoyePas encore d'évaluation
- De La Guerre Froide À La Chute Du Mûr de Berlin (2006) - EXAMENDocument1 pageDe La Guerre Froide À La Chute Du Mûr de Berlin (2006) - EXAMENPape BoyePas encore d'évaluation
- Bouilleur BP IncidentsDocument5 pagesBouilleur BP IncidentsPape BoyePas encore d'évaluation
- Algebre de BooleDocument6 pagesAlgebre de BoolePape BoyePas encore d'évaluation
- 12.2.2.9 Lab - Regular Expression TutorialDocument3 pages12.2.2.9 Lab - Regular Expression TutorialthiernoPas encore d'évaluation
- Polycopié Réseaux Informatiques CorrigéDocument98 pagesPolycopié Réseaux Informatiques CorrigéZidane TiogoPas encore d'évaluation
- Tower FrenchDocument215 pagesTower FrenchbegougPas encore d'évaluation
- Analyse Fonctionnelle (V: Vélo Assistance ÉlectriqueDocument6 pagesAnalyse Fonctionnelle (V: Vélo Assistance Électriquesilkbull Iuo-alaPas encore d'évaluation
- Comment Accéder Aux Données de Mon Smartphone Si Mon Écran Tactile Est Cassé - Samsung BE - FRDocument4 pagesComment Accéder Aux Données de Mon Smartphone Si Mon Écran Tactile Est Cassé - Samsung BE - FRdgnagbeinfoPas encore d'évaluation
- La Navigation InternetDocument9 pagesLa Navigation InternetangaPas encore d'évaluation
- Thème 2: Internet.: 1961: Naissance Communication Par Paquet 1974: Naissance 1989: Démocratisation D'internet GrâceDocument4 pagesThème 2: Internet.: 1961: Naissance Communication Par Paquet 1974: Naissance 1989: Démocratisation D'internet GrâceManault levacherPas encore d'évaluation
- Proposition Devoir PremiereDocument2 pagesProposition Devoir PremiereDiaPas encore d'évaluation
- Cours VHDL Et FPGADocument135 pagesCours VHDL Et FPGAMounira Tarhouni100% (1)
- Chapitre 6 - GestionDeTransactionsDistribuéesDocument18 pagesChapitre 6 - GestionDeTransactionsDistribuéesCho ChiPas encore d'évaluation
- Rapport INBMIDocument31 pagesRapport INBMIhafsiaPas encore d'évaluation
- Zaki ChahbounDocument10 pagesZaki ChahbounMOHAMED TAMZAITIPas encore d'évaluation
- Rapport EMSI FinalDocument28 pagesRapport EMSI FinalAchraf MarchoudPas encore d'évaluation
- Introduction Réseau Topologies - Protocoles Architectures en Couches (Modèles OSI, IEEE, TCP - IP) PDFDocument184 pagesIntroduction Réseau Topologies - Protocoles Architectures en Couches (Modèles OSI, IEEE, TCP - IP) PDFGreg Morris100% (1)
- Recueild Exercices Corrigsde Programmesen Langage CDocument50 pagesRecueild Exercices Corrigsde Programmesen Langage CTarik El Mahtouchi0% (1)
- BIGTREETECH PI4B Adapter V1.0 User Manual FRDocument14 pagesBIGTREETECH PI4B Adapter V1.0 User Manual FRdamienduinoPas encore d'évaluation
- TRE RS Rep+ & RS Rep-MIA300392-3Document12 pagesTRE RS Rep+ & RS Rep-MIA300392-3Laurent AnabaPas encore d'évaluation
- ACACEDDocument15 pagesACACEDAlexandra UséPas encore d'évaluation
- Dzonde Naoussi Raoul 2011Document179 pagesDzonde Naoussi Raoul 2011Naz HaPas encore d'évaluation
- Évaluation: Collège UrsuyaDocument1 pageÉvaluation: Collège UrsuyaDidier TchaleuPas encore d'évaluation
- WMT05 06Document8 pagesWMT05 06Mohamed Anouar BidaPas encore d'évaluation
- Aut Log Vol1 v4Document175 pagesAut Log Vol1 v4Sylbe MarthePas encore d'évaluation
- Telecoms Entreprises - Catalogue Produits Et Services 2014Document35 pagesTelecoms Entreprises - Catalogue Produits Et Services 2014munaimiPas encore d'évaluation
- Cours SDFDocument283 pagesCours SDFsayedms9983Pas encore d'évaluation
- Instances Du Moteur de Base de Données SQL ServerDocument5 pagesInstances Du Moteur de Base de Données SQL ServerNguessan KouadioPas encore d'évaluation
- 6.2.4.4 Packet Tracer - Configuring IPv6 Static and Default Routes InstructionsDocument3 pages6.2.4.4 Packet Tracer - Configuring IPv6 Static and Default Routes InstructionsBrazza In My VeinsPas encore d'évaluation
- 10 Exemples de SMS Professionnels Que Vos Clients Veulent RecevoirDocument16 pages10 Exemples de SMS Professionnels Que Vos Clients Veulent RecevoirgilmarPas encore d'évaluation
- MemoireDocument109 pagesMemoirefilalk100% (1)
- Présentation Sans TitreDocument2 pagesPrésentation Sans TitreSassi InesPas encore d'évaluation
- Modbus 2019Document45 pagesModbus 2019AZwaPas encore d'évaluation