Vous aimerez peut-être aussi
- Les Capteurs Automobile: InstrumentationDocument23 pagesLes Capteurs Automobile: InstrumentationMohammed75% (4)
- Electronique AutoDocument13 pagesElectronique Autoaymendab100% (2)
- Cours Mec Tome 2Document62 pagesCours Mec Tome 2Rodolphe AmoiPas encore d'évaluation
- InjectionDocument8 pagesInjectionBertrand Jourdain100% (1)
- Bosch KJetronic Cahier TechniqueDocument26 pagesBosch KJetronic Cahier TechniqueAmaloumimiAmaloumimi100% (1)
- TD 21 Corrigé - Loi E-S Pour Les Réducteurs Et Multiplicateurs de Vitesse À Train SimpleDocument6 pagesTD 21 Corrigé - Loi E-S Pour Les Réducteurs Et Multiplicateurs de Vitesse À Train SimpleKhadija Labrizi80% (5)
- 1055H Manuel Pompe CentrifugeDocument12 pages1055H Manuel Pompe CentrifugeAbdessadek HamdaouiPas encore d'évaluation
- TD CapteursDocument8 pagesTD CapteursMbaira Leila100% (4)
- FZ6 SDocument456 pagesFZ6 SShabou Hatem100% (1)
- Moteur DV6: CaractéristiquesDocument42 pagesMoteur DV6: CaractéristiquesOlivier ParisPas encore d'évaluation
- Les Éléments PneumatiquesDocument9 pagesLes Éléments PneumatiquesNicola VitulliPas encore d'évaluation
- Asservissement MCCDocument37 pagesAsservissement MCCabdessamadPas encore d'évaluation
- Heidelberg QMDocument582 pagesHeidelberg QMCarlos Ospina GarciaPas encore d'évaluation
- Nouveau Document Microsoft WordDocument9 pagesNouveau Document Microsoft WordYass561Pas encore d'évaluation
- Manuel BotteleuseDocument43 pagesManuel BotteleuseAmine LaribiPas encore d'évaluation
- TransmisionDocument59 pagesTransmisionWilliam Ruiz EspezaPas encore d'évaluation
- Filet AgesDocument3 pagesFilet AgeshourialaaPas encore d'évaluation
- Tpfluides L3Document14 pagesTpfluides L3Diae BenzekriPas encore d'évaluation
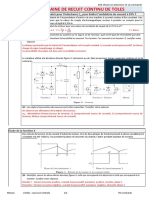
- dm14 - dc04 - Chaine de Recuit Suite-CorDocument6 pagesdm14 - dc04 - Chaine de Recuit Suite-CorPenda NiassPas encore d'évaluation
- Embrayage HydrocinetiqueDocument6 pagesEmbrayage HydrocinetiqueAmine MerwarPas encore d'évaluation
- Asservissement MCCDocument37 pagesAsservissement MCCsmail4everPas encore d'évaluation
- Instruments de Controle MoteurDocument13 pagesInstruments de Controle MoteurIbrahim AbdouPas encore d'évaluation
- Assvt MCCDocument4 pagesAssvt MCCtrabelsioussama300Pas encore d'évaluation
- CH05 Mécanisme de Transmission Du MouvementDocument8 pagesCH05 Mécanisme de Transmission Du Mouvementmouf zerargaPas encore d'évaluation
- BTS Et 2013 NoumeaDocument7 pagesBTS Et 2013 NoumeaTarak BenslimanePas encore d'évaluation
- Automatique AsservissementDocument37 pagesAutomatique AsservissementBahPas encore d'évaluation
- Alimentation Carburant Golf 2Document12 pagesAlimentation Carburant Golf 2Benbar 007Pas encore d'évaluation
- Les Capteurs ElèveDocument17 pagesLes Capteurs Elèveqw2jcz45pkPas encore d'évaluation
- Labo EcoulementsDocument15 pagesLabo EcoulementsSaid DhimdiPas encore d'évaluation
- Capt EursDocument30 pagesCapt Eursقرين لطفيPas encore d'évaluation
- Dossier Technique Asservissement de Position PDFDocument6 pagesDossier Technique Asservissement de Position PDFNouh NahnouhPas encore d'évaluation
- Commande PWM Moteurs PDFDocument5 pagesCommande PWM Moteurs PDFHasibKaabiPas encore d'évaluation
- TP Vitesse DR300v2bDocument5 pagesTP Vitesse DR300v2bYacino Yacin100% (1)
- DRDocument8 pagesDRKasi FilsPas encore d'évaluation
- Online - Revue TechniqueDocument27 pagesOnline - Revue TechniqueAlain SenegasPas encore d'évaluation
- TP3 Moteur Courant Continu HacheurDocument7 pagesTP3 Moteur Courant Continu HacheurYou CefPas encore d'évaluation
- TP2 EqpDocument8 pagesTP2 EqpSOUHAIL FADLIPas encore d'évaluation
- Cours Station de Compresion Des Fonc MaintDocument87 pagesCours Station de Compresion Des Fonc MaintTayyeb OuisPas encore d'évaluation
- M1 TD EER Vitesse Courant Moteur DC+SolutionDocument3 pagesM1 TD EER Vitesse Courant Moteur DC+SolutionNounou BoulouPas encore d'évaluation
- Systeme de Direction GrueDocument13 pagesSysteme de Direction GruegoxmadPas encore d'évaluation
- Tpi3a-V0 0Document4 pagesTpi3a-V0 0bananaadams7Pas encore d'évaluation
- Rapport BenomarDocument7 pagesRapport BenomarYasser El HaddarPas encore d'évaluation
- Afreinage AbsDocument8 pagesAfreinage Absmabrouk2013Pas encore d'évaluation
- 5-2 - Performances Des Machines Rotodynamiques - 2Document66 pages5-2 - Performances Des Machines Rotodynamiques - 2merouaneinconuPas encore d'évaluation
- Transmission de PuissanceDocument111 pagesTransmission de PuissanceSaley NouroudinePas encore d'évaluation
- TP PompeDocument22 pagesTP Pompeoussamahadid93Pas encore d'évaluation
- Support1 (ApprocheMono)Document6 pagesSupport1 (ApprocheMono)MarwaEnnouriPas encore d'évaluation
- Instrumentele MotoarelorDocument43 pagesInstrumentele MotoarelorpalociPas encore d'évaluation
- Pompe 1Document16 pagesPompe 1Saif ElgharselleouiPas encore d'évaluation
- 8899 8899 Sujet 0 Bts MV 2017 Corrige 1Document12 pages8899 8899 Sujet 0 Bts MV 2017 Corrige 1Bernard MbotchackPas encore d'évaluation
- Expose Kra EssiDocument32 pagesExpose Kra EssibeugrePas encore d'évaluation
- Regulation de La Vitesse DDocument8 pagesRegulation de La Vitesse Dbadre989100% (2)
- TP Systemes Asservis Lineaires 2-1Document2 pagesTP Systemes Asservis Lineaires 2-1Christian Le Drums Emadjui100% (1)
- Théorie Des TurbomachinesDocument9 pagesThéorie Des Turbomachines237 Md vuesPas encore d'évaluation
- TP VV Ei3 2023Document39 pagesTP VV Ei3 2023Omayma BoukatayaPas encore d'évaluation
- Meca24 - CopieDocument7 pagesMeca24 - CopiemezziPas encore d'évaluation
- 05 Variation de Vitesse Des MAS ÉlèveDocument4 pages05 Variation de Vitesse Des MAS ÉlèveHassan BelkaidPas encore d'évaluation
- Mme ZarzouriDocument17 pagesMme Zarzouritete200414Pas encore d'évaluation
- Cours MASS543 (2)Document40 pagesCours MASS543 (2)DahPas encore d'évaluation
- Autour de L'automobile: Identification, Mesure, Régulation Et ÉnergieDocument11 pagesAutour de L'automobile: Identification, Mesure, Régulation Et ÉnergieAhmed Adil AsraouiPas encore d'évaluation
- TGL 12.180 210 4X2 BB BL - LK - Euro 4Document8 pagesTGL 12.180 210 4X2 BB BL - LK - Euro 4Kouni AhmedPas encore d'évaluation
- TD5 Vocabulaire Dzierla CédricDocument4 pagesTD5 Vocabulaire Dzierla CédricCédric DziePas encore d'évaluation
- Différentes Fixations Pour Moteurs B3, B5 Et B14Document1 pageDifférentes Fixations Pour Moteurs B3, B5 Et B14Geoffrey PrigentPas encore d'évaluation
- Fonction Distribuer Preactionneurs Electriques ExercicesDocument13 pagesFonction Distribuer Preactionneurs Electriques ExercicesvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvPas encore d'évaluation
- MP We - WS2000 GB - 06 98Document184 pagesMP We - WS2000 GB - 06 98RomanPas encore d'évaluation
- 125YZ90 PartCatalogDocument47 pages125YZ90 PartCatalogVGAPas encore d'évaluation
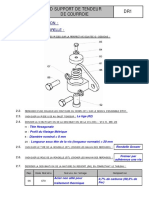
- TD SUPPORT PRDocument2 pagesTD SUPPORT PRmasteratsiiPas encore d'évaluation
- EXAMEN - Juin 2018 - Éléments de Machines - LAEM2 - RattrappageDocument6 pagesEXAMEN - Juin 2018 - Éléments de Machines - LAEM2 - RattrappageKhaled GammoudiPas encore d'évaluation
- Dnce FRDocument40 pagesDnce FRFlorent YIBOKOUPas encore d'évaluation
- Kfs 100 BDocument9 pagesKfs 100 Bpriolo rhodanPas encore d'évaluation
- Exercices À FaireDocument5 pagesExercices À Fairejhonklarson23Pas encore d'évaluation
- Mito (08-) 07Document11 pagesMito (08-) 07toni13021302Pas encore d'évaluation
- Sebp3720 00 00 All PDFDocument623 pagesSebp3720 00 00 All PDFAffify AfifyPas encore d'évaluation
- Fonctionnement Convertisseur de CoupleDocument1 pageFonctionnement Convertisseur de CoupleMartinezPas encore d'évaluation
- Chapitre 2 - Les Pompes Et Les CompresseursDocument24 pagesChapitre 2 - Les Pompes Et Les CompresseursMuhammad BneijaraPas encore d'évaluation
- ENCADREURDocument14 pagesENCADREURCyrillePas encore d'évaluation
- Dorsoduro 750 ABS F-E 2008Document175 pagesDorsoduro 750 ABS F-E 2008Loic TrocmePas encore d'évaluation
- Bon ProbiDocument38 pagesBon Probi628078Pas encore d'évaluation
- Exploitation Et Maintenance Des Pompes CentrifugesDocument134 pagesExploitation Et Maintenance Des Pompes Centrifugesmouad jaidanePas encore d'évaluation
- 5 Parking Automatique Grafcet EEPROM Du 16F84 Interruptions Du 16F84 Programmation Du P.L.D Exercice 1Document58 pages5 Parking Automatique Grafcet EEPROM Du 16F84 Interruptions Du 16F84 Programmation Du P.L.D Exercice 1ademgassoumikiaPas encore d'évaluation
- Landini 6CDocument20 pagesLandini 6CAndrea FilottoPas encore d'évaluation
- Outils Rotary: TricônesDocument4 pagesOutils Rotary: TricônesKouassi JaurèsPas encore d'évaluation